 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTDiff: A State Transition Diffusion Framework for Time Series Imputation in Industrial Systems
Aug 28, 2025Most deep learning methods for imputing missing values treat the task as completing patterns within a fixed time window. This assumption often fails in industrial systems, where dynamics are driven by control actions, are highly non-stationary, and can experience long, uninterrupted gaps. We propose STDiff, which reframes imputation as learning how the system evolves from one state to the next. STDiff uses a conditional denoising diffusion model with a causal bias aligned to control theory, generating missing values step-by-step based on the most recent known state and relevant control or environmental inputs. On a public wastewater treatment dataset with simulated missing blocks, STDiff consistently achieves the lowest errors, with its advantage increasing for longer gaps. On a raw industrial dataset with substantial real gaps, it produces trajectories that remain dynamically plausible, in contrast to window-based models that tend to flatten or over-smooth. These results support dynamics-aware, explicitly conditioned imputation as a robust approach for industrial time series, and we discuss computational trade-offs and extensions to broader domains.
Application of Soft Actor-Critic Algorithms in Optimizing Wastewater Treatment with Time Delays Integration
Nov 27, 2024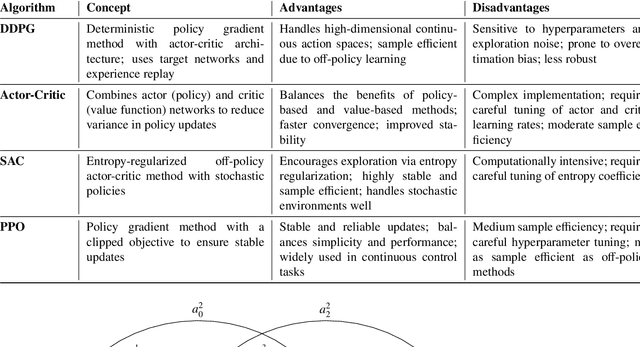
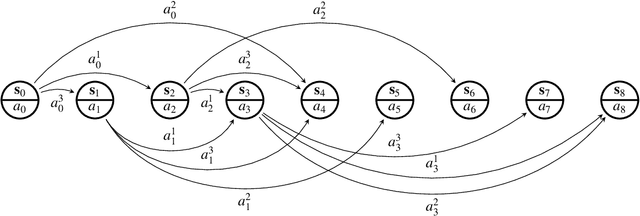
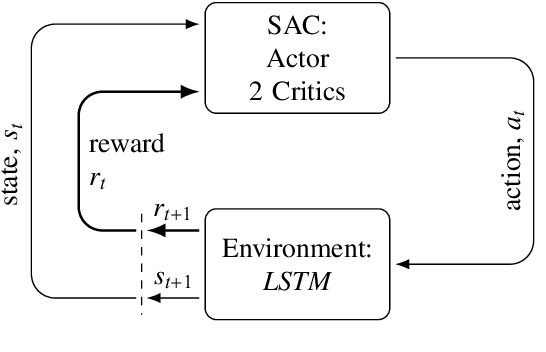

Wastewater treatment plants face unique challenges for process control due to their complex dynamics, slow time constants, and stochastic delays in observations and actions. These characteristics make conventional control methods, such as Proportional-Integral-Derivative controllers, suboptimal for achieving efficient phosphorus removal, a critical component of wastewater treatment to ensure environmental sustainability. This study addresses these challenges using a novel deep reinforcement learning approach based on the Soft Actor-Critic algorithm, integrated with a custom simulator designed to model the delayed feedback inherent in wastewater treatment plants. The simulator incorporates Long Short-Term Memory networks for accurate multi-step state predictions, enabling realistic training scenarios. To account for the stochastic nature of delays, agents were trained under three delay scenarios: no delay, constant delay, and random delay. The results demonstrate that incorporating random delays into the reinforcement learning framework significantly improves phosphorus removal efficiency while reducing operational costs. Specifically, the delay-aware agent achieved 36% reduction in phosphorus emissions, 55% higher reward, 77% lower target deviation from the regulatory limit, and 9% lower total costs than traditional control methods in the simulated environment. These findings underscore the potential of reinforcement learning to overcome the limitations of conventional control strategies in wastewater treatment, providing an adaptive and cost-effective solution for phosphorus removal.
Wastewater Treatment Plant Data for Nutrient Removal System
Jul 07, 2024This paper introduces the Agtrup (BlueKolding) dataset, collected from Denmark's Agtrup wastewater treatment plant, specifically designed to enhance phosphorus removal via chemical and biological methods. This rich dataset is assembled through a high-frequency Supervisory Control and Data Acquisition (SCADA) system data collection process, which captures a wide range of variables related to the operational dynamics of nutrient removal. It comprises time-series data featuring measurements sampled to a frequency of two minutes across various control, process, and environmental variables. The comprehensive dataset aims to foster significant advancements in wastewater management by supporting the development of sophisticated predictive models and optimizing operational strategies. By providing detailed insights into the interactions and efficiencies of chemical and biological phosphorus removal processes, the dataset serves as a vital resource for environmental researchers and engineers focused on improving the sustainability and effectiveness of wastewater treatment operations. The ultimate goal of this dataset is to facilitate the creation of digital twins and the application of machine learning techniques, such as deep reinforcement learning, to predict and enhance system performance under varying operational conditions.
Improved Long Short-Term Memory-based Wastewater Treatment Simulators for Deep Reinforcement Learning
Mar 22, 2024Even though Deep Reinforcement Learning (DRL) showed outstanding results in the fields of Robotics and Games, it is still challenging to implement it in the optimization of industrial processes like wastewater treatment. One of the challenges is the lack of a simulation environment that will represent the actual plant as accurately as possible to train DRL policies. Stochasticity and non-linearity of wastewater treatment data lead to unstable and incorrect predictions of models over long time horizons. One possible reason for the models' incorrect simulation behavior can be related to the issue of compounding error, which is the accumulation of errors throughout the simulation. The compounding error occurs because the model utilizes its predictions as inputs at each time step. The error between the actual data and the prediction accumulates as the simulation continues. We implemented two methods to improve the trained models for wastewater treatment data, which resulted in more accurate simulators: 1- Using the model's prediction data as input in the training step as a tool of correction, and 2- Change in the loss function to consider the long-term predicted shape (dynamics). The experimental results showed that implementing these methods can improve the behavior of simulators in terms of Dynamic Time Warping throughout a year up to 98% compared to the base model. These improvements demonstrate significant promise in creating simulators for biological processes that do not need pre-existing knowledge of the process but instead depend exclusively on time series data obtained from the system.
Advancements in Point Cloud-Based 3D Defect Detection and Classification for Industrial Systems: A Comprehensive Survey
Feb 20, 2024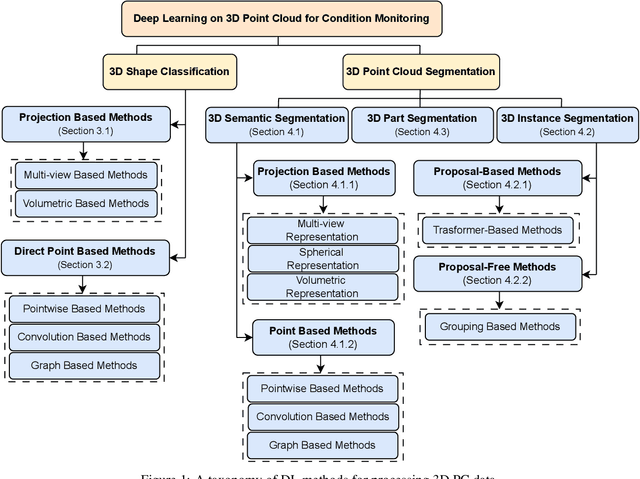
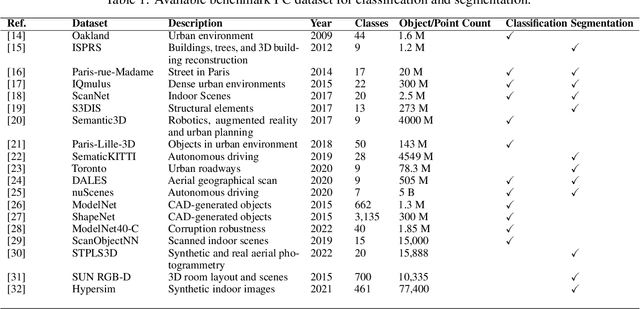
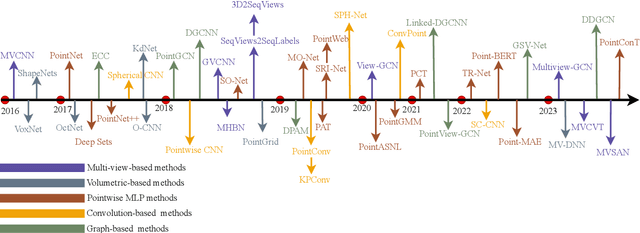
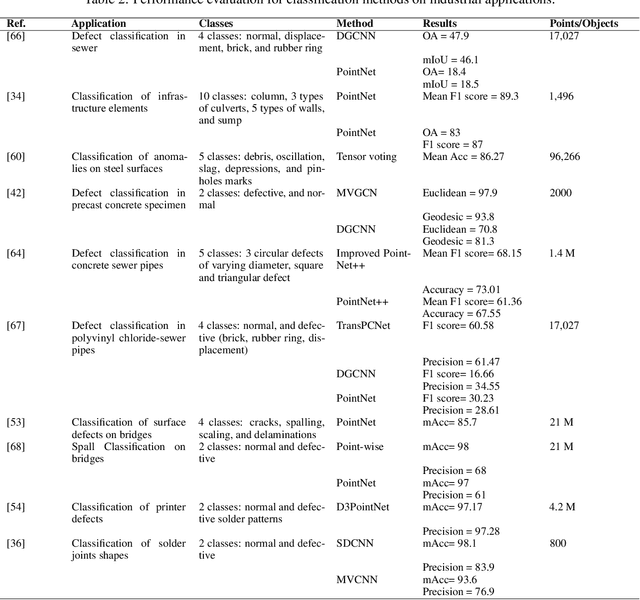
In recent years, 3D point clouds (PCs) have gained significant attention due to their diverse applications across various fields such as computer vision (CV), condition monitoring, virtual reality, robotics, autonomous driving etc. Deep learning (DL) has proven effective in leveraging 3D PCs to address various challenges previously encountered in 2D vision. However, the application of deep neural networks (DNN) to process 3D PCs presents its own set of challenges. To address these challenges, numerous methods have been proposed. This paper provides an in-depth review of recent advancements in DL-based condition monitoring (CM) using 3D PCs, with a specific focus on defect shape classification and segmentation within industrial applications for operational and maintenance purposes. Recognizing the crucial role of these aspects in industrial maintenance, the paper provides insightful observations that offer perspectives on the strengths and limitations of the reviewed DL-based PC processing methods. This synthesis of knowledge aims to contribute to the understanding and enhancement of CM processes, particularly within the framework of remaining useful life (RUL), in industrial systems.
Deep Learning Based Simulators for the Phosphorus Removal Process Control in Wastewater Treatment via Deep Reinforcement Learning Algorithms
Jan 23, 2024Phosphorus removal is vital in wastewater treatment to reduce reliance on limited resources. Deep reinforcement learning (DRL) is a machine learning technique that can optimize complex and nonlinear systems, including the processes in wastewater treatment plants, by learning control policies through trial and error. However, applying DRL to chemical and biological processes is challenging due to the need for accurate simulators. This study trained six models to identify the phosphorus removal process and used them to create a simulator for the DRL environment. Although the models achieved high accuracy (>97%), uncertainty and incorrect prediction behavior limited their performance as simulators over longer horizons. Compounding errors in the models' predictions were identified as one of the causes of this problem. This approach for improving process control involves creating simulation environments for DRL algorithms, using data from supervisory control and data acquisition (SCADA) systems with a sufficient historical horizon without complex system modeling or parameter estimation.
A Fuzzy Time Series-Based Model Using Particle Swarm Optimization and Weighted Rules
Oct 28, 2023During the last decades, a myriad of fuzzy time series models have been proposed in scientific literature. Among the most accurate models found in fuzzy time series, the high-order ones are the most accurate. The research described in this paper tackles three potential limitations associated with the application of high-order fuzzy time series models. To begin with, the adequacy of forecast rules lacks consistency. Secondly, as the model's order increases, data utilization diminishes. Thirdly, the uniformity of forecast rules proves to be highly contingent on the chosen interval partitions. To address these likely drawbacks, we introduce a novel model based on fuzzy time series that amalgamates the principles of particle swarm optimization (PSO) and weighted summation. Our results show that our approach models accurately the time series in comparison with previous methods.
Design, Modelling and Control of an Amphibious Quad-Rotor for Pipeline Inspection
Oct 02, 2023Regular inspections are crucial to maintaining waste-water pipelines in good condition. The challenge is that inside a pipeline the space is narrow and may have a complex structure. The conventional methods that use pipe robots with heavy cables are expensive, time-consuming, and difficult to operate. In this work, we develop an amphibious system that combines a quad-copter with a surface vehicle, creating a hybrid unmanned aerial floating vehicle (HUAFV). Nonlinear dynamics of the HUAFV are modeled based on the dynamic models of both operating modes. The model is validated through experiments and simulations. A PI controller designed and tuned on the developed model is implemented onto a prototype platform. Our experiments demonstrate the effectiveness of the new HUAFV's modeling and design.