 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask Allocation for Autonomous Machines using Computational Intelligence and Deep Reinforcement Learning
Aug 28, 2025Enabling multiple autonomous machines to perform reliably requires the development of efficient cooperative control algorithms. This paper presents a survey of algorithms that have been developed for controlling and coordinating autonomous machines in complex environments. We especially focus on task allocation methods using computational intelligence (CI) and deep reinforcement learning (RL). The advantages and disadvantages of the surveyed methods are analysed thoroughly. We also propose and discuss in detail various future research directions that shed light on how to improve existing algorithms or create new methods to enhance the employability and performance of autonomous machines in real-world applications. The findings indicate that CI and deep RL methods provide viable approaches to addressing complex task allocation problems in dynamic and uncertain environments. The recent development of deep RL has greatly contributed to the literature on controlling and coordinating autonomous machines, and it has become a growing trend in this area. It is envisaged that this paper will provide researchers and engineers with a comprehensive overview of progress in machine learning research related to autonomous machines. It also highlights underexplored areas, identifies emerging methodologies, and suggests new avenues for exploration in future research within this domain.
Object-level Cross-view Geo-localization with Location Enhancement and Multi-Head Cross Attention
May 23, 2025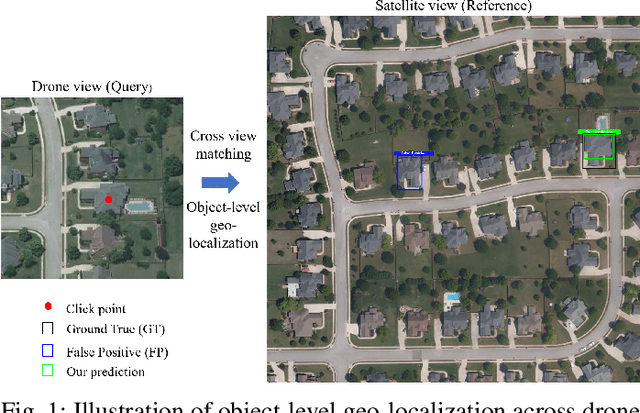
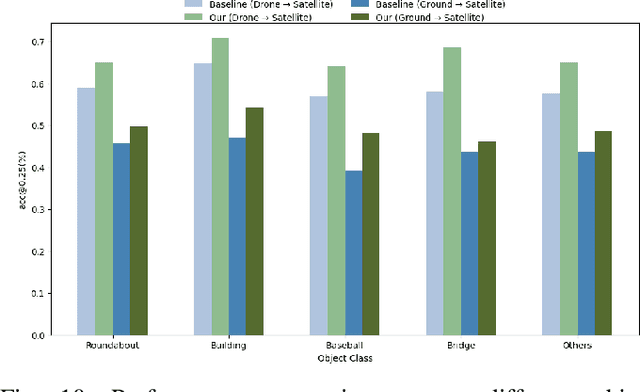
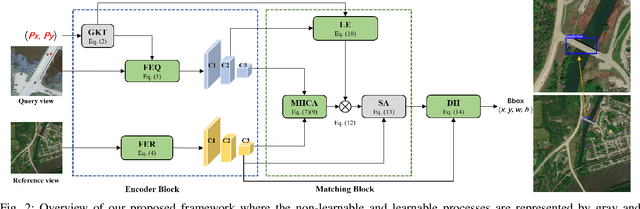
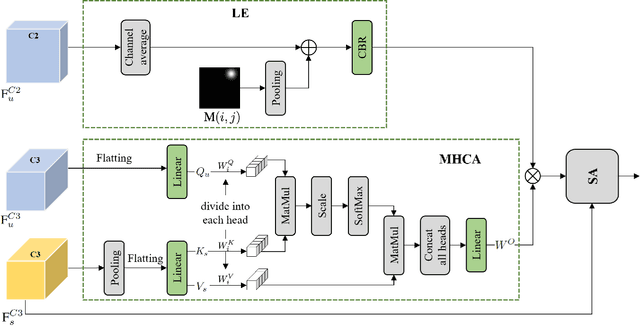
Cross-view geo-localization determines the location of a query image, captured by a drone or ground-based camera, by matching it to a geo-referenced satellite image. While traditional approaches focus on image-level localization, many applications, such as search-and-rescue, infrastructure inspection, and precision delivery, demand object-level accuracy. This enables users to prompt a specific object with a single click on a drone image to retrieve precise geo-tagged information of the object. However, variations in viewpoints, timing, and imaging conditions pose significant challenges, especially when identifying visually similar objects in extensive satellite imagery. To address these challenges, we propose an Object-level Cross-view Geo-localization Network (OCGNet). It integrates user-specified click locations using Gaussian Kernel Transfer (GKT) to preserve location information throughout the network. This cue is dually embedded into the feature encoder and feature matching blocks, ensuring robust object-specific localization. Additionally, OCGNet incorporates a Location Enhancement (LE) module and a Multi-Head Cross Attention (MHCA) module to adaptively emphasize object-specific features or expand focus to relevant contextual regions when necessary. OCGNet achieves state-of-the-art performance on a public dataset, CVOGL. It also demonstrates few-shot learning capabilities, effectively generalizing from limited examples, making it suitable for diverse applications (https://github.com/ZheyangH/OCGNet).
A nonlinear real time capable motion cueing algorithm based on deep reinforcement learning
Mar 13, 2025
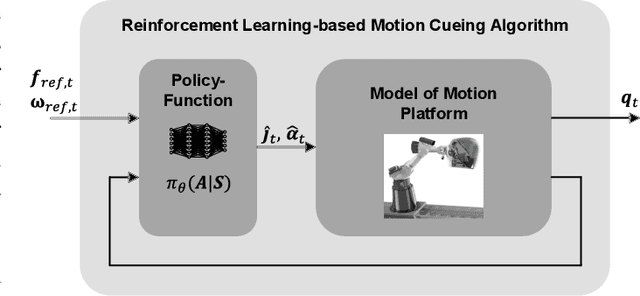
In motion simulation, motion cueing algorithms are used for the trajectory planning of the motion simulator platform, where workspace limitations prevent direct reproduction of reference trajectories. Strategies such as motion washout, which return the platform to its center, are crucial in these settings. For serial robotic MSPs with highly nonlinear workspaces, it is essential to maximize the efficient utilization of the MSPs kinematic and dynamic capabilities. Traditional approaches, including classical washout filtering and linear model predictive control, fail to consider platform-specific, nonlinear properties, while nonlinear model predictive control, though comprehensive, imposes high computational demands that hinder real-time, pilot-in-the-loop application without further simplification. To overcome these limitations, we introduce a novel approach using deep reinforcement learning for motion cueing, demonstrated here for the first time in a 6-degree-of-freedom setting with full consideration of the MSPs kinematic nonlinearities. Previous work by the authors successfully demonstrated the application of DRL to a simplified 2-DOF setup, which did not consider kinematic or dynamic constraints. This approach has been extended to all 6 DOF by incorporating a complete kinematic model of the MSP into the algorithm, a crucial step for enabling its application on a real motion simulator. The training of the DRL-MCA is based on Proximal Policy Optimization in an actor-critic implementation combined with an automated hyperparameter optimization. After detailing the necessary training framework and the algorithm itself, we provide a comprehensive validation, demonstrating that the DRL MCA achieves competitive performance against established algorithms. Moreover, it generates feasible trajectories by respecting all system constraints and meets all real-time requirements with low...
Enhancing Cognitive Workload Classification Using Integrated LSTM Layers and CNNs for fNIRS Data Analysis
Jul 22, 2024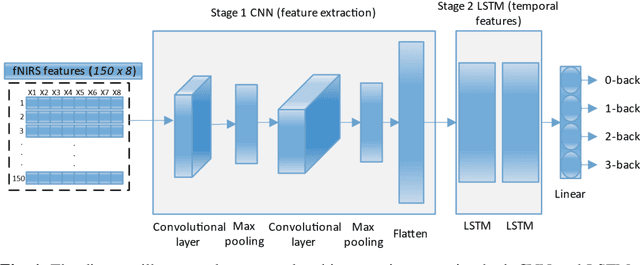

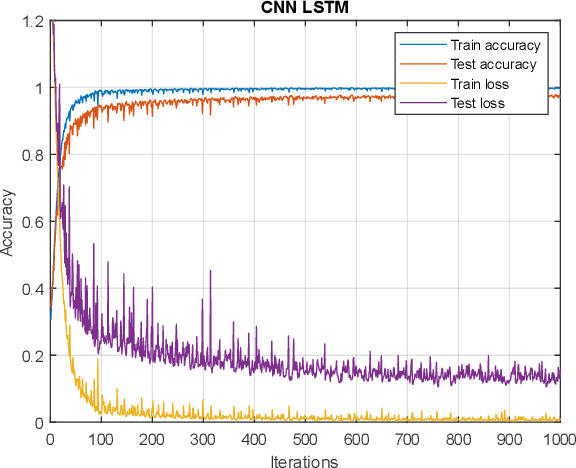

Functional near-infrared spectroscopy (fNIRS) is employed as a non-invasive method to monitor functional brain activation by capturing changes in the concentrations of oxygenated haemoglobin (HbO) and deoxygenated haemo-globin (HbR). Various machine learning classification techniques have been utilized to distinguish cognitive states. However, conventional machine learning methods, although simpler to implement, undergo a complex pre-processing phase before network training and demonstrate reduced accuracy due to inadequate data preprocessing. Additionally, previous research in cog-nitive load assessment using fNIRS has predominantly focused on differ-sizeentiating between two levels of mental workload. These studies mainly aim to classify low and high levels of cognitive load or distinguish between easy and difficult tasks. To address these limitations associated with conven-tional methods, this paper conducts a comprehensive exploration of the im-pact of Long Short-Term Memory (LSTM) layers on the effectiveness of Convolutional Neural Networks (CNNs) within deep learning models. This is to address the issues related to spatial features overfitting and lack of tem-poral dependencies in CNN in the previous studies. By integrating LSTM layers, the model can capture temporal dependencies in the fNIRS data, al-lowing for a more comprehensive understanding of cognitive states. The primary objective is to assess how incorporating LSTM layers enhances the performance of CNNs. The experimental results presented in this paper demonstrate that the integration of LSTM layers with Convolutional layers results in an increase in the accuracy of deep learning models from 97.40% to 97.92%.
Machine Learning Meets Advanced Robotic Manipulation
Sep 22, 2023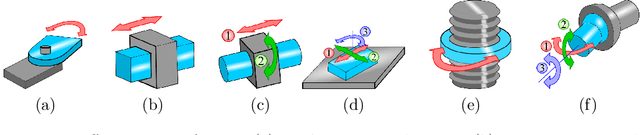
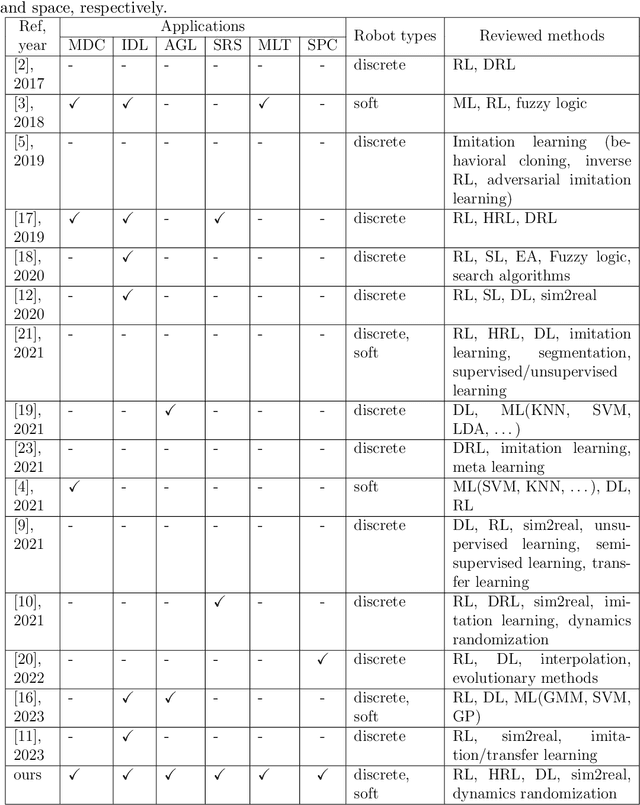
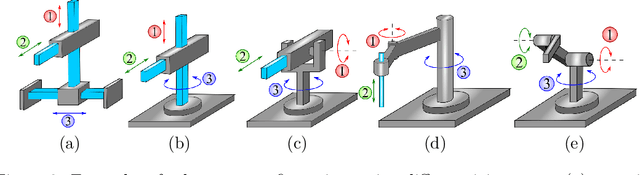
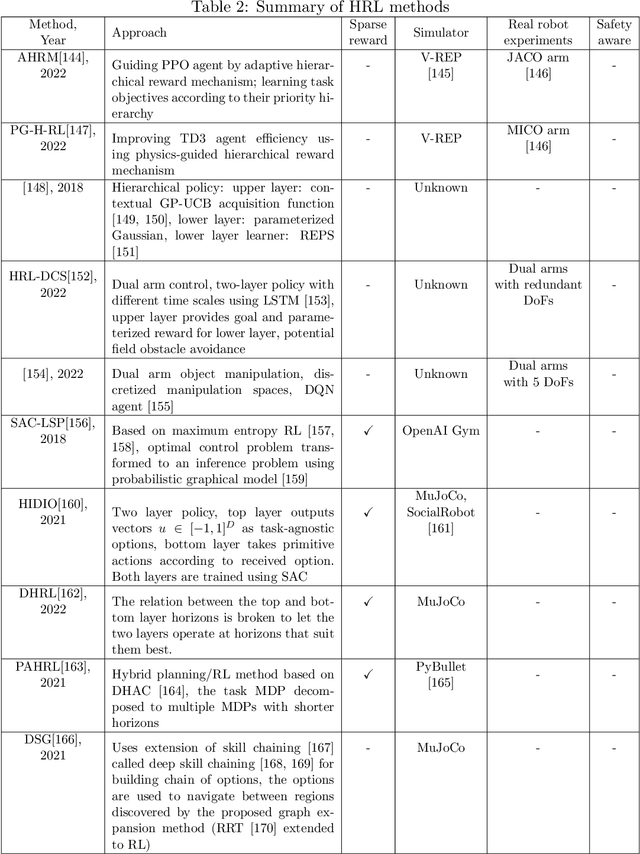
Automated industries lead to high quality production, lower manufacturing cost and better utilization of human resources. Robotic manipulator arms have major role in the automation process. However, for complex manipulation tasks, hard coding efficient and safe trajectories is challenging and time consuming. Machine learning methods have the potential to learn such controllers based on expert demonstrations. Despite promising advances, better approaches must be developed to improve safety, reliability, and efficiency of ML methods in both training and deployment phases. This survey aims to review cutting edge technologies and recent trends on ML methods applied to real-world manipulation tasks. After reviewing the related background on ML, the rest of the paper is devoted to ML applications in different domains such as industry, healthcare, agriculture, space, military, and search and rescue. The paper is closed with important research directions for future works.
A Review of Machine Learning-based Security in Cloud Computing
Sep 10, 2023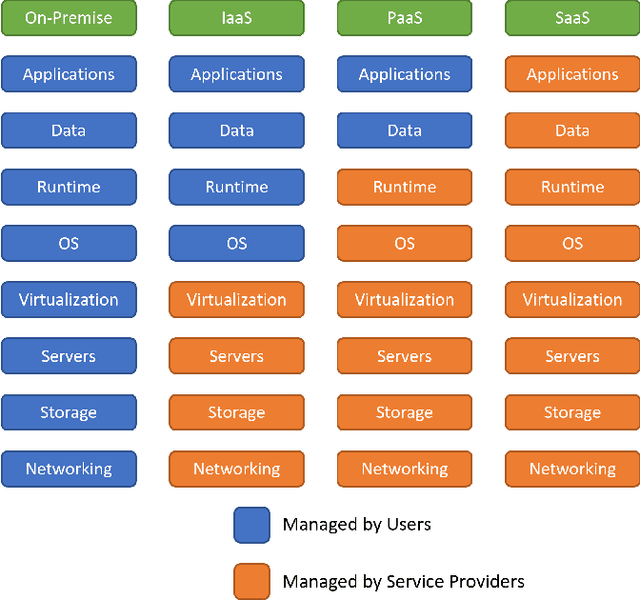
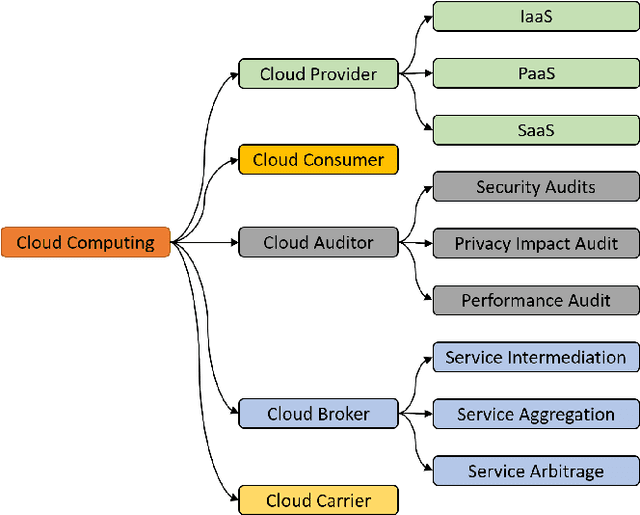
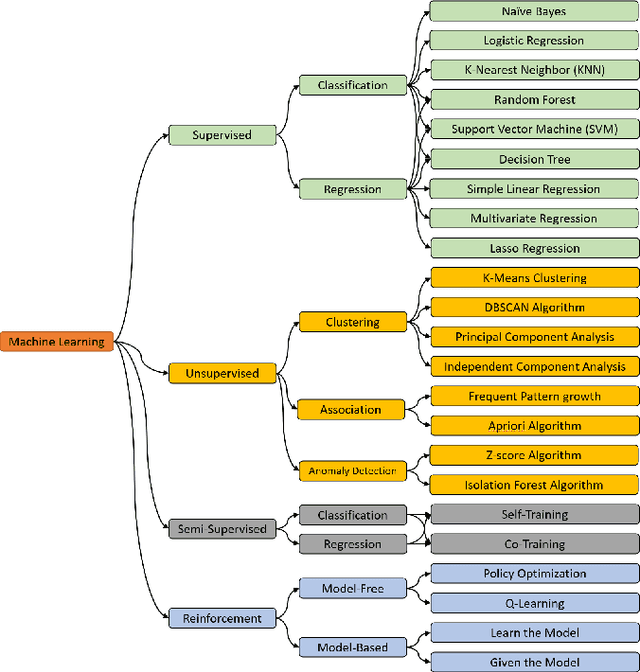
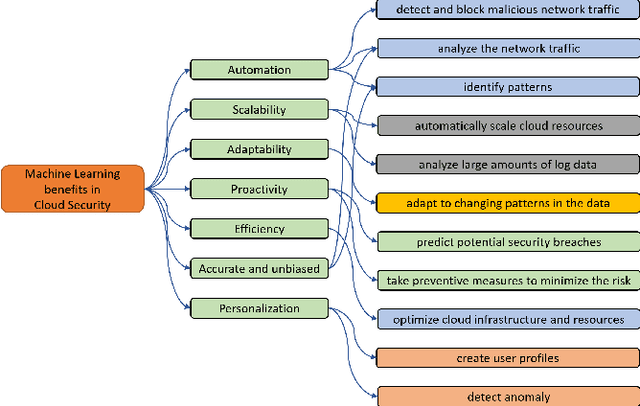
Cloud Computing (CC) is revolutionizing the way IT resources are delivered to users, allowing them to access and manage their systems with increased cost-effectiveness and simplified infrastructure. However, with the growth of CC comes a host of security risks, including threats to availability, integrity, and confidentiality. To address these challenges, Machine Learning (ML) is increasingly being used by Cloud Service Providers (CSPs) to reduce the need for human intervention in identifying and resolving security issues. With the ability to analyze vast amounts of data, and make high-accuracy predictions, ML can transform the way CSPs approach security. In this paper, we will explore some of the most recent research in the field of ML-based security in Cloud Computing. We will examine the features and effectiveness of a range of ML algorithms, highlighting their unique strengths and potential limitations. Our goal is to provide a comprehensive overview of the current state of ML in cloud security and to shed light on the exciting possibilities that this emerging field has to offer.
A Review on Robot Manipulation Methods in Human-Robot Interactions
Sep 09, 2023



Robot manipulation is an important part of human-robot interaction technology. However, traditional pre-programmed methods can only accomplish simple and repetitive tasks. To enable effective communication between robots and humans, and to predict and adapt to uncertain environments, this paper reviews recent autonomous and adaptive learning in robotic manipulation algorithms. It includes typical applications and challenges of human-robot interaction, fundamental tasks of robot manipulation and one of the most widely used formulations of robot manipulation, Markov Decision Process. Recent research focusing on robot manipulation is mainly based on Reinforcement Learning and Imitation Learning. This review paper shows the importance of Deep Reinforcement Learning, which plays an important role in manipulating robots to complete complex tasks in disturbed and unfamiliar environments. With the introduction of Imitation Learning, it is possible for robot manipulation to get rid of reward function design and achieve a simple, stable and supervised learning process. This paper reviews and compares the main features and popular algorithms for both Reinforcement Learning and Imitation Learning.
A Survey of Imitation Learning: Algorithms, Recent Developments, and Challenges
Sep 05, 2023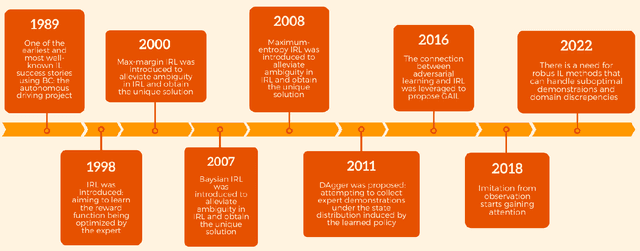
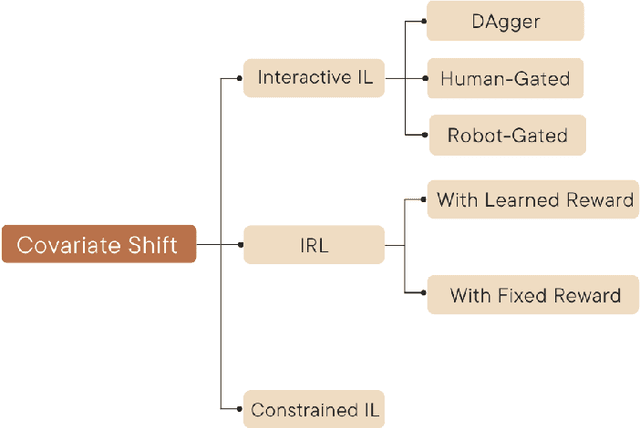
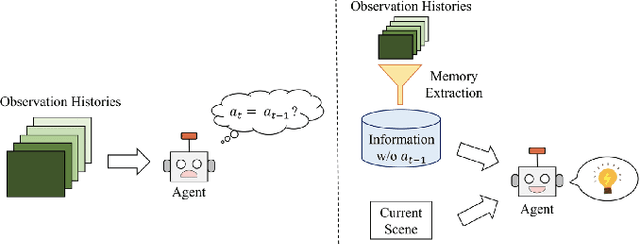
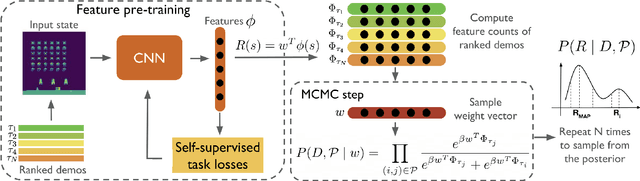
In recent years, the development of robotics and artificial intelligence (AI) systems has been nothing short of remarkable. As these systems continue to evolve, they are being utilized in increasingly complex and unstructured environments, such as autonomous driving, aerial robotics, and natural language processing. As a consequence, programming their behaviors manually or defining their behavior through reward functions (as done in reinforcement learning (RL)) has become exceedingly difficult. This is because such environments require a high degree of flexibility and adaptability, making it challenging to specify an optimal set of rules or reward signals that can account for all possible situations. In such environments, learning from an expert's behavior through imitation is often more appealing. This is where imitation learning (IL) comes into play - a process where desired behavior is learned by imitating an expert's behavior, which is provided through demonstrations. This paper aims to provide an introduction to IL and an overview of its underlying assumptions and approaches. It also offers a detailed description of recent advances and emerging areas of research in the field. Additionally, the paper discusses how researchers have addressed common challenges associated with IL and provides potential directions for future research. Overall, the goal of the paper is to provide a comprehensive guide to the growing field of IL in robotics and AI.
Uncertainty Aware Neural Network from Similarity and Sensitivity
Apr 27, 2023Researchers have proposed several approaches for neural network (NN) based uncertainty quantification (UQ). However, most of the approaches are developed considering strong assumptions. Uncertainty quantification algorithms often perform poorly in an input domain and the reason for poor performance remains unknown. Therefore, we present a neural network training method that considers similar samples with sensitivity awareness in this paper. In the proposed NN training method for UQ, first, we train a shallow NN for the point prediction. Then, we compute the absolute differences between prediction and targets and train another NN for predicting those absolute differences or absolute errors. Domains with high average absolute errors represent a high uncertainty. In the next step, we select each sample in the training set one by one and compute both prediction and error sensitivities. Then we select similar samples with sensitivity consideration and save indexes of similar samples. The ranges of an input parameter become narrower when the output is highly sensitive to that parameter. After that, we construct initial uncertainty bounds (UB) by considering the distribution of sensitivity aware similar samples. Prediction intervals (PIs) from initial uncertainty bounds are larger and cover more samples than required. Therefore, we train bound correction NN. As following all the steps for finding UB for each sample requires a lot of computation and memory access, we train a UB computation NN. The UB computation NN takes an input sample and provides an uncertainty bound. The UB computation NN is the final product of the proposed approach. Scripts of the proposed method are available in the following GitHub repository: github.com/dipuk0506/UQ
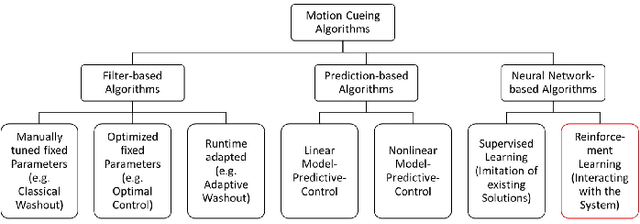
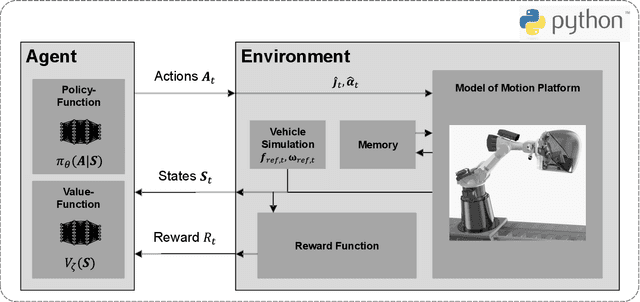
A novel approach of a deep reinforcement learning based motion cueing algorithm for vehicle driving simulation
Apr 15, 2023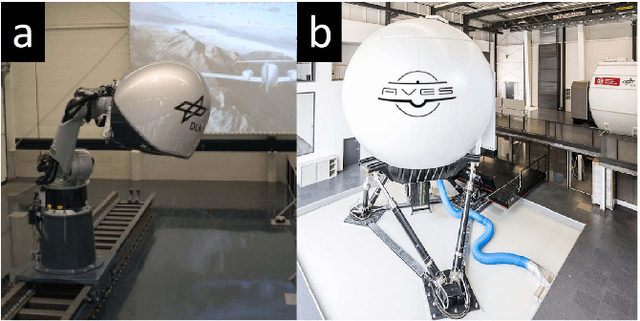
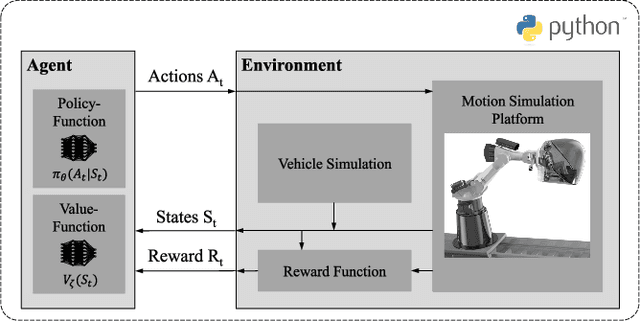
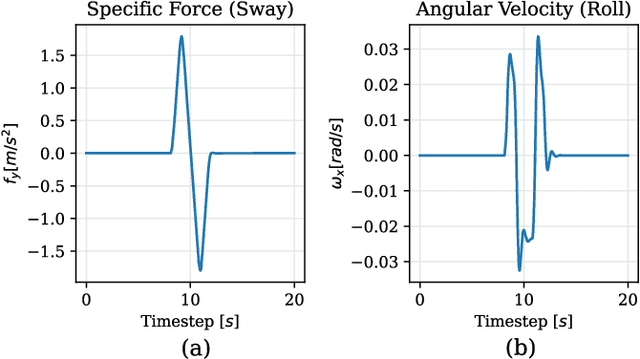
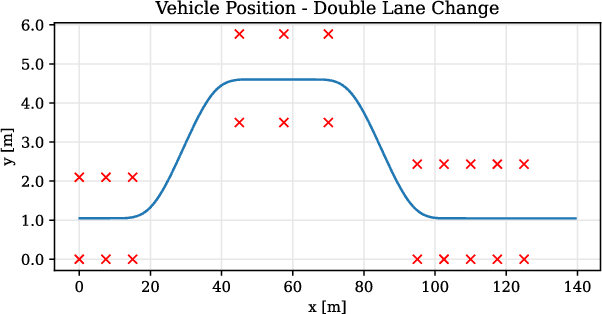
In the field of motion simulation, the level of immersion strongly depends on the motion cueing algorithm (MCA), as it transfers the reference motion of the simulated vehicle to a motion of the motion simulation platform (MSP). The challenge for the MCA is to reproduce the motion perception of a real vehicle driver as accurately as possible without exceeding the limits of the workspace of the MSP in order to provide a realistic virtual driving experience. In case of a large discrepancy between the perceived motion signals and the optical cues, motion sickness may occur with the typical symptoms of nausea, dizziness, headache and fatigue. Existing approaches either produce non-optimal results, e.g., due to filtering, linearization, or simplifications, or the required computational time exceeds the real-time requirements of a closed-loop application. In this work a new solution is presented, where not a human designer specifies the principles of the MCA but an artificial intelligence (AI) learns the optimal motion by trial and error in an interaction with the MSP. To achieve this, deep reinforcement learning (RL) is applied, where an agent interacts with an environment formulated as a Markov decision process~(MDP). This allows the agent to directly control a simulated MSP to obtain feedback on its performance in terms of platform workspace usage and the motion acting on the simulator user. The RL algorithm used is proximal policy optimization (PPO), where the value function and the policy corresponding to the control strategy are learned and both are mapped in artificial neural networks (ANN). This approach is implemented in Python and the functionality is demonstrated by the practical example of pre-recorded lateral maneuvers. The subsequent validation on a standardized double lane change shows that the RL algorithm is able to learn the control strategy and improve the quality of...