 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Hydra Hand: A Mode-Switching Underactuated Gripper with Precision and Power Grasping Modes
Sep 26, 2023



Human hands are able to grasp a wide range of object sizes, shapes, and weights, achieved via reshaping and altering their apparent grasping stiffness between compliant power and rigid precision. Achieving similar versatility in robotic hands remains a challenge, which has often been addressed by adding extra controllable degrees of freedom, tactile sensors, or specialised extra grasping hardware, at the cost of control complexity and robustness. We introduce a novel reconfigurable four-fingered two-actuator underactuated gripper -- the Hydra Hand -- that switches between compliant power and rigid precision grasps using a single motor, while generating grasps via a single hydraulic actuator -- exhibiting adaptive grasping between finger pairs, enabling the power grasping of two objects simultaneously. The mode switching mechanism and the hand's kinematics are presented and analysed, and performance is tested on two grasping benchmarks: one focused on rigid objects, and the other on items of clothing. The Hydra Hand is shown to excel at grasping large and irregular objects, and small objects with its respective compliant power and rigid precision configurations. The hand's versatility is then showcased by executing the challenging manipulation task of safely grasping and placing a bunch of grapes, and then plucking a single grape from the bunch.
Machine Learning Meets Advanced Robotic Manipulation
Sep 22, 2023
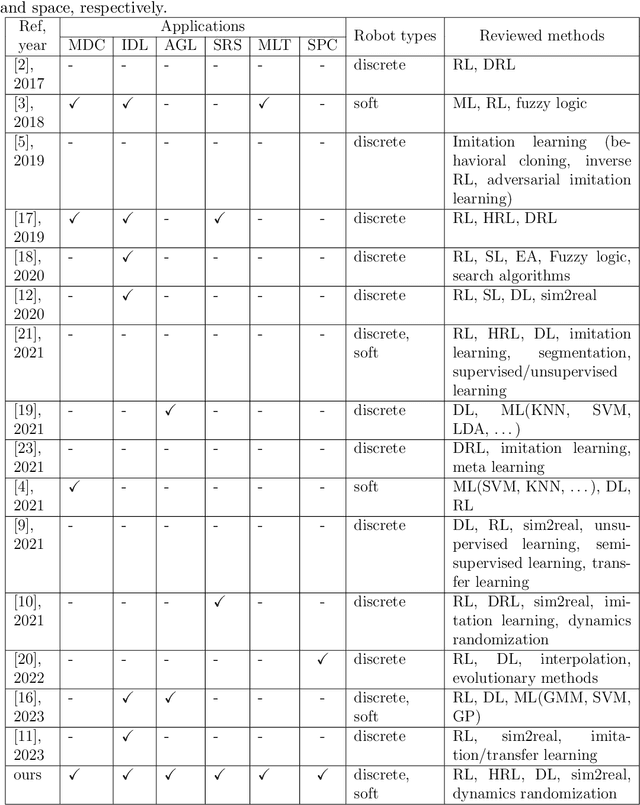
Automated industries lead to high quality production, lower manufacturing cost and better utilization of human resources. Robotic manipulator arms have major role in the automation process. However, for complex manipulation tasks, hard coding efficient and safe trajectories is challenging and time consuming. Machine learning methods have the potential to learn such controllers based on expert demonstrations. Despite promising advances, better approaches must be developed to improve safety, reliability, and efficiency of ML methods in both training and deployment phases. This survey aims to review cutting edge technologies and recent trends on ML methods applied to real-world manipulation tasks. After reviewing the related background on ML, the rest of the paper is devoted to ML applications in different domains such as industry, healthcare, agriculture, space, military, and search and rescue. The paper is closed with important research directions for future works.
A New Tensioning Method using Deep Reinforcement Learning for Surgical Pattern Cutting
Jan 10, 2019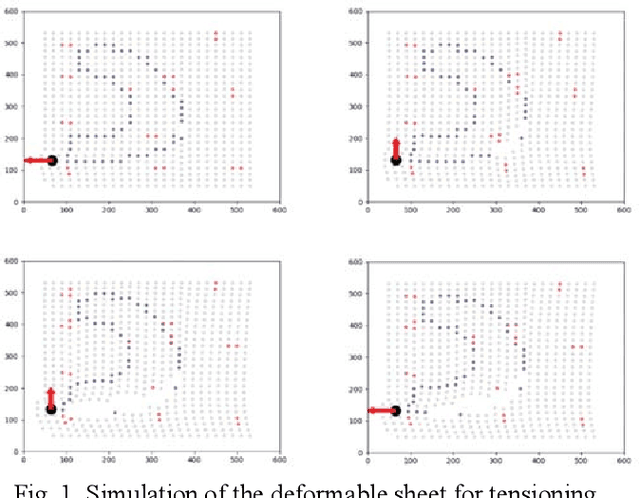
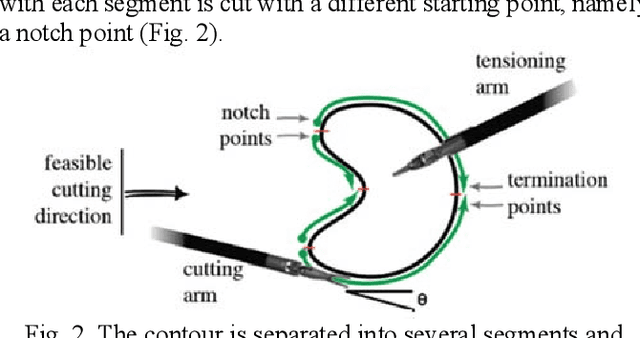
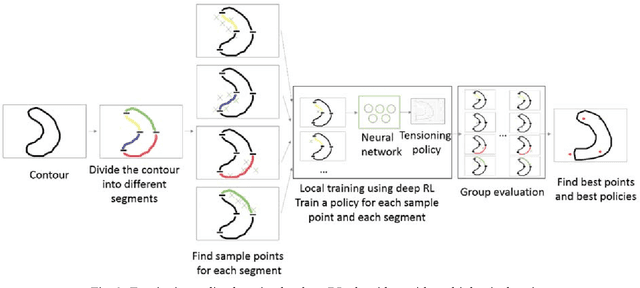
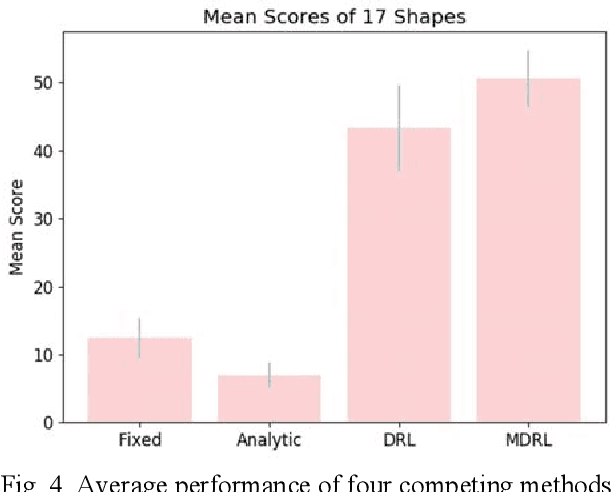
Surgeons normally need surgical scissors and tissue grippers to cut through a deformable surgical tissue. The cutting accuracy depends on the skills to manipulate these two tools. Such skills are part of basic surgical skills training as in the Fundamentals of Laparoscopic Surgery. The gripper is used to pinch a point on the surgical sheet and pull the tissue to a certain direction to maintain the tension while the scissors cut through a trajectory. As the surgical materials are deformable, it requires a comprehensive tensioning policy to yield appropriate tensioning direction at each step of the cutting process. Automating a tensioning policy for a given cutting trajectory will support not only the human surgeons but also the surgical robots to improve the cutting accuracy and reliability. This paper presents a multiple pinch point approach to modelling an autonomous tensioning planner based on a deep reinforcement learning algorithm. Experiments on a simulator show that the proposed method is superior to existing methods in terms of both performance and robustness.