 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurvey on Leveraging Uncertainty Estimation Towards Trustworthy Deep Neural Networks: The Case of Reject Option and Post-training Processing
Apr 11, 2023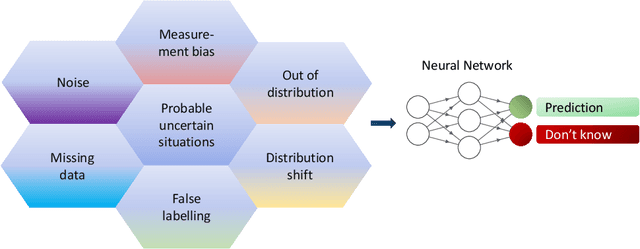

Although neural networks (especially deep neural networks) have achieved \textit{better-than-human} performance in many fields, their real-world deployment is still questionable due to the lack of awareness about the limitation in their knowledge. To incorporate such awareness in the machine learning model, prediction with reject option (also known as selective classification or classification with abstention) has been proposed in literature. In this paper, we present a systematic review of the prediction with the reject option in the context of various neural networks. To the best of our knowledge, this is the first study focusing on this aspect of neural networks. Moreover, we discuss different novel loss functions related to the reject option and post-training processing (if any) of network output for generating suitable measurements for knowledge awareness of the model. Finally, we address the application of the rejection option in reducing the prediction time for the real-time problems and present a comprehensive summary of the techniques related to the reject option in the context of extensive variety of neural networks. Our code is available on GitHub: \url{https://github.com/MehediHasanTutul/Reject_option}
A Comprehensive Review on Autonomous Navigation
Dec 24, 2022



The field of autonomous mobile robots has undergone dramatic advancements over the past decades. Despite achieving important milestones, several challenges are yet to be addressed. Aggregating the achievements of the robotic community as survey papers is vital to keep the track of current state-of-the-art and the challenges that must be tackled in the future. This paper tries to provide a comprehensive review of autonomous mobile robots covering topics such as sensor types, mobile robot platforms, simulation tools, path planning and following, sensor fusion methods, obstacle avoidance, and SLAM. The urge to present a survey paper is twofold. First, autonomous navigation field evolves fast so writing survey papers regularly is crucial to keep the research community well-aware of the current status of this field. Second, deep learning methods have revolutionized many fields including autonomous navigation. Therefore, it is necessary to give an appropriate treatment of the role of deep learning in autonomous navigation as well which is covered in this paper. Future works and research gaps will also be discussed.
Controlled Dropout for Uncertainty Estimation
May 06, 2022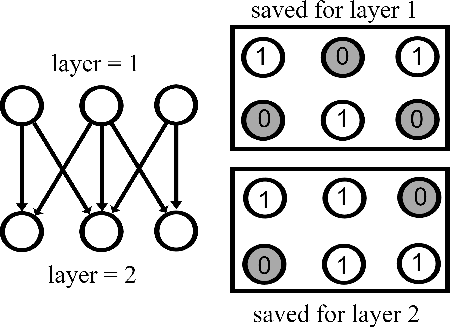
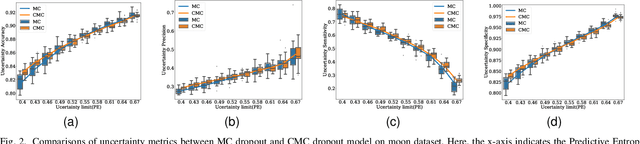
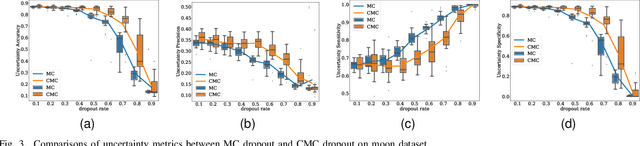
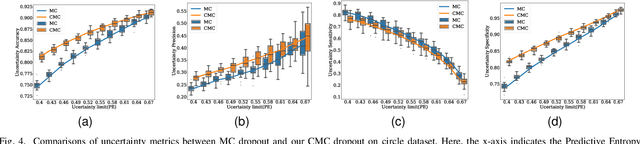
Uncertainty quantification in a neural network is one of the most discussed topics for safety-critical applications. Though Neural Networks (NNs) have achieved state-of-the-art performance for many applications, they still provide unreliable point predictions, which lack information about uncertainty estimates. Among various methods to enable neural networks to estimate uncertainty, Monte Carlo (MC) dropout has gained much popularity in a short period due to its simplicity. In this study, we present a new version of the traditional dropout layer where we are able to fix the number of dropout configurations. As such, each layer can take and apply the new dropout layer in the MC method to quantify the uncertainty associated with NN predictions. We conduct experiments on both toy and realistic datasets and compare the results with the MC method using the traditional dropout layer. Performance analysis utilizing uncertainty evaluation metrics corroborates that our dropout layer offers better performance in most cases.