 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparison of gait phase detection using traditional machine learning and deep learning techniques
Mar 07, 2024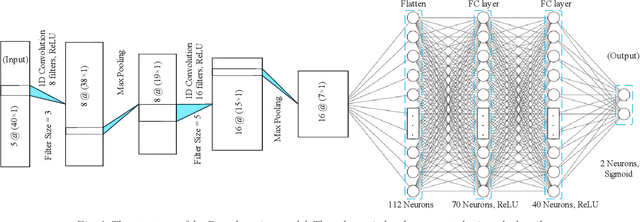
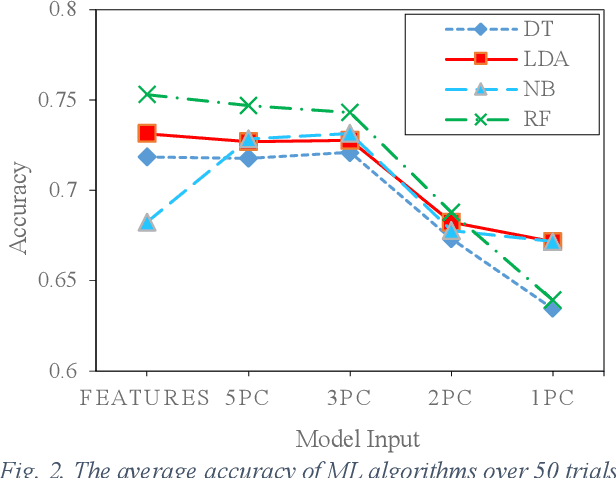


Human walking is a complex activity with a high level of cooperation and interaction between different systems in the body. Accurate detection of the phases of the gait in real-time is crucial to control lower-limb assistive devices like exoskeletons and prostheses. There are several ways to detect the walking gait phase, ranging from cameras and depth sensors to the sensors attached to the device itself or the human body. Electromyography (EMG) is one of the input methods that has captured lots of attention due to its precision and time delay between neuromuscular activity and muscle movement. This study proposes a few Machine Learning (ML) based models on lower-limb EMG data for human walking. The proposed models are based on Gaussian Naive Bayes (NB), Decision Tree (DT), Random Forest (RF), Linear Discriminant Analysis (LDA) and Deep Convolutional Neural Networks (DCNN). The traditional ML models are trained on hand-crafted features or their reduced components using Principal Component Analysis (PCA). On the contrary, the DCNN model utilises convolutional layers to extract features from raw data. The results show up to 75% average accuracy for traditional ML models and 79% for Deep Learning (DL) model. The highest achieved accuracy in 50 trials of the training DL model is 89.5%.
* Copyright \c{opyright} This is the accepted version of an article published in the proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC)
A Comprehensive Review on Autonomous Navigation
Dec 24, 2022



The field of autonomous mobile robots has undergone dramatic advancements over the past decades. Despite achieving important milestones, several challenges are yet to be addressed. Aggregating the achievements of the robotic community as survey papers is vital to keep the track of current state-of-the-art and the challenges that must be tackled in the future. This paper tries to provide a comprehensive review of autonomous mobile robots covering topics such as sensor types, mobile robot platforms, simulation tools, path planning and following, sensor fusion methods, obstacle avoidance, and SLAM. The urge to present a survey paper is twofold. First, autonomous navigation field evolves fast so writing survey papers regularly is crucial to keep the research community well-aware of the current status of this field. Second, deep learning methods have revolutionized many fields including autonomous navigation. Therefore, it is necessary to give an appropriate treatment of the role of deep learning in autonomous navigation as well which is covered in this paper. Future works and research gaps will also be discussed.
Critical Review of Exoskeleton Technology: State of the art and development of physical and cognitive human-robot interface
Dec 07, 2021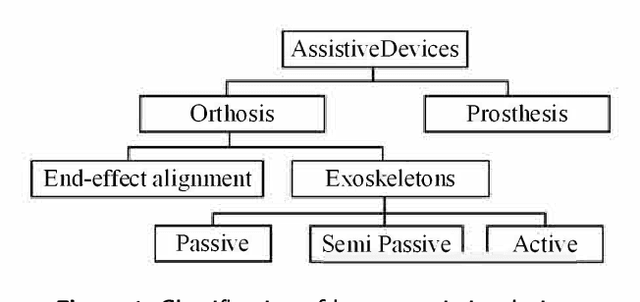
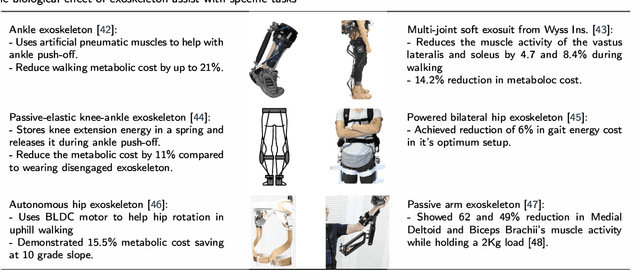
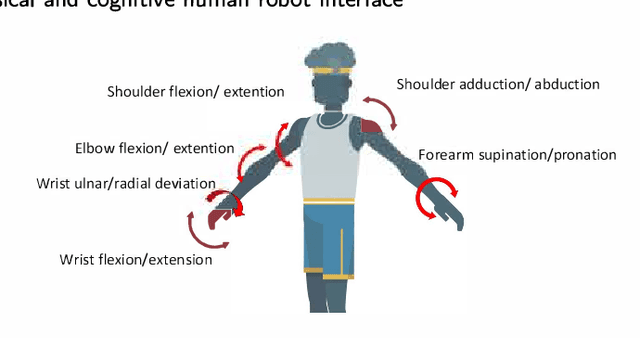
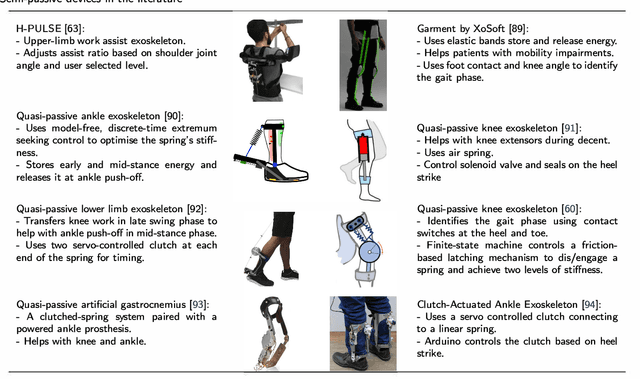
Exoskeletons and orthoses are wearable mobile systems providing mechanical benefits to the users. Despite significant improvements in the last decades, the technology is not fully mature to be adopted for strenuous and non-programmed tasks. To accommodate this insufficiency, different aspects of this technology need to be analysed and improved. Numerous studies have been trying to address some aspects of exoskeletons, e.g. mechanism design, intent prediction, and control scheme. However, most works have focused on a specific element of design or application without providing a comprehensive review framework. This study aims to analyse and survey the contributing aspects to the improvement and broad adoption of this technology. To address this, after introducing assistive devices and exoskeletons, the main design criteria will be investigated from a physical Human-Robot Interface (HRI) perspective. The study will be further developed by outlining several examples of known assistive devices in different categories. In order to establish an intelligent HRI strategy and enabling intuitive control for users, cognitive HRI will be investigated. Various approaches to this strategy will be reviewed, and a model for intent prediction will be proposed. This model is utilised to predict the gate phase from a single Electromyography (EMG) channel input. The outcomes of modelling show the potential use of single-channel input in low-power assistive devices. Furthermore, the proposed model can provide redundancy in devices with a complex control strategy.