 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroStrata: Harnessing Neurosymbolic Paradigms for Improved Design, Testability, and Verifiability of Autonomous CPS
Feb 17, 2025


Autonomous cyber-physical systems (CPSs) leverage AI for perception, planning, and control but face trust and safety certification challenges due to inherent uncertainties. The neurosymbolic paradigm replaces stochastic layers with interpretable symbolic AI, enabling determinism. While promising, challenges like multisensor fusion, adaptability, and verification remain. This paper introduces NeuroStrata, a neurosymbolic framework to enhance the testing and verification of autonomous CPS. We outline its key components, present early results, and detail future plans.
Learning Randomized Reductions and Program Properties
Dec 24, 2024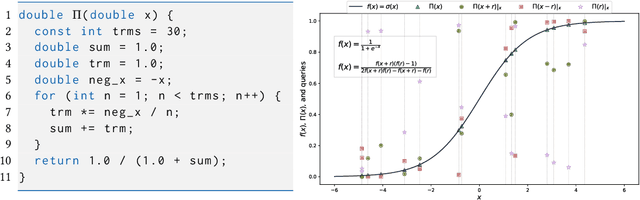
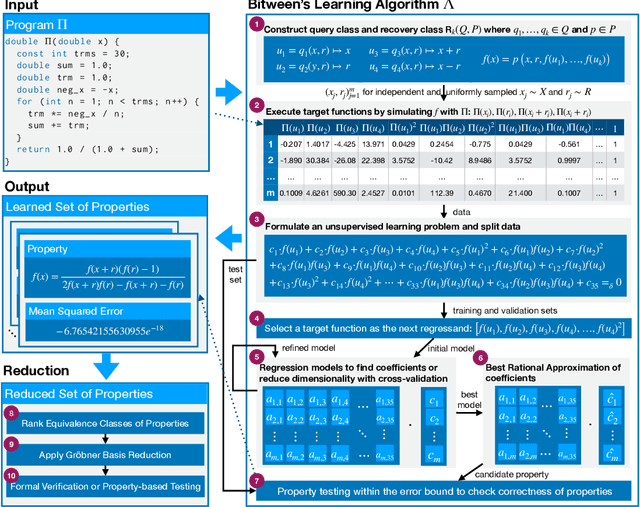
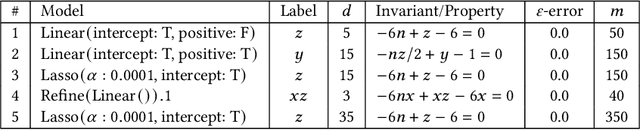

The correctness of computations remains a significant challenge in computer science, with traditional approaches relying on automated testing or formal verification. Self-testing/correcting programs introduce an alternative paradigm, allowing a program to verify and correct its own outputs via randomized reductions, a concept that previously required manual derivation. In this paper, we present Bitween, a method and tool for automated learning of randomized (self)-reductions and program properties in numerical programs. Bitween combines symbolic analysis and machine learning, with a surprising finding: polynomial-time linear regression, a basic optimization method, is not only sufficient but also highly effective for deriving complex randomized self-reductions and program invariants, often outperforming sophisticated mixed-integer linear programming solvers. We establish a theoretical framework for learning these reductions and introduce RSR-Bench, a benchmark suite for evaluating Bitween's capabilities on scientific and machine learning functions. Our empirical results show that Bitween surpasses state-of-the-art tools in scalability, stability, and sample efficiency when evaluated on nonlinear invariant benchmarks like NLA-DigBench. Bitween is open-source as a Python package and accessible via a web interface that supports C language programs.
Testing learning-enabled cyber-physical systems with Large-Language Models: A Formal Approach
Nov 13, 2023The integration of machine learning (ML) into cyber-physical systems (CPS) offers significant benefits, including enhanced efficiency, predictive capabilities, real-time responsiveness, and the enabling of autonomous operations. This convergence has accelerated the development and deployment of a range of real-world applications, such as autonomous vehicles, delivery drones, service robots, and telemedicine procedures. However, the software development life cycle (SDLC) for AI-infused CPS diverges significantly from traditional approaches, featuring data and learning as two critical components. Existing verification and validation techniques are often inadequate for these new paradigms. In this study, we pinpoint the main challenges in ensuring formal safety for learningenabled CPS.We begin by examining testing as the most pragmatic method for verification and validation, summarizing the current state-of-the-art methodologies. Recognizing the limitations in current testing approaches to provide formal safety guarantees, we propose a roadmap to transition from foundational probabilistic testing to a more rigorous approach capable of delivering formal assurance.
Analyzing Intentional Behavior in Autonomous Agents under Uncertainty
Jul 04, 2023Principled accountability for autonomous decision-making in uncertain environments requires distinguishing intentional outcomes from negligent designs from actual accidents. We propose analyzing the behavior of autonomous agents through a quantitative measure of the evidence of intentional behavior. We model an uncertain environment as a Markov Decision Process (MDP). For a given scenario, we rely on probabilistic model checking to compute the ability of the agent to influence reaching a certain event. We call this the scope of agency. We say that there is evidence of intentional behavior if the scope of agency is high and the decisions of the agent are close to being optimal for reaching the event. Our method applies counterfactual reasoning to automatically generate relevant scenarios that can be analyzed to increase the confidence of our assessment. In a case study, we show how our method can distinguish between 'intentional' and 'accidental' traffic collisions.
Repairing Bugs in Python Assignments Using Large Language Models
Sep 29, 2022
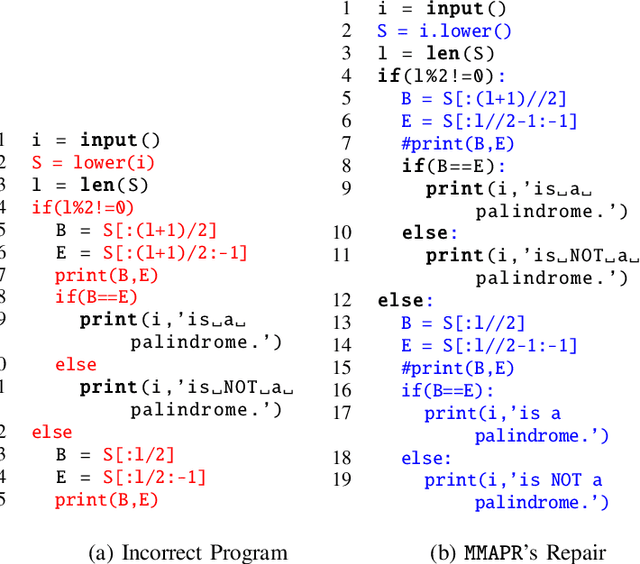
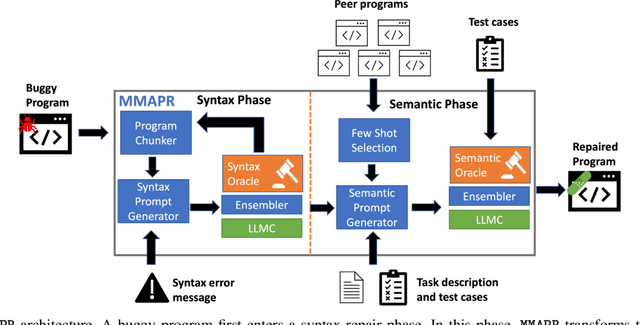
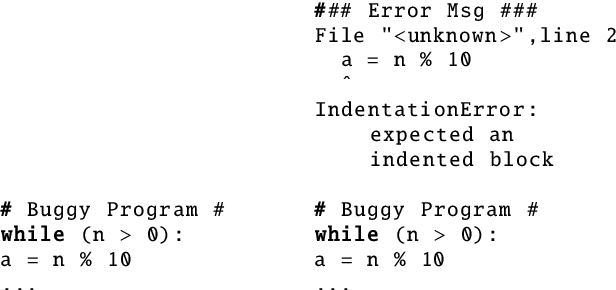
Students often make mistakes on their introductory programming assignments as part of their learning process. Unfortunately, providing custom repairs for these mistakes can require a substantial amount of time and effort from class instructors. Automated program repair (APR) techniques can be used to synthesize such fixes. Prior work has explored the use of symbolic and neural techniques for APR in the education domain. Both types of approaches require either substantial engineering efforts or large amounts of data and training. We propose to use a large language model trained on code, such as Codex, to build an APR system -- MMAPR -- for introductory Python programming assignments. Our system can fix both syntactic and semantic mistakes by combining multi-modal prompts, iterative querying, test-case-based selection of few-shots, and program chunking. We evaluate MMAPR on 286 real student programs and compare to a baseline built by combining a state-of-the-art Python syntax repair engine, BIFI, and state-of-the-art Python semantic repair engine for student assignments, Refactory. We find that MMAPR can fix more programs and produce smaller patches on average.
Succinct Explanations With Cascading Decision Trees
Oct 13, 2020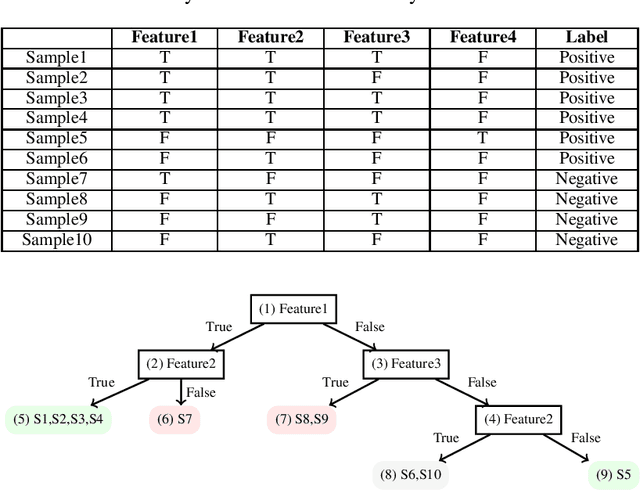
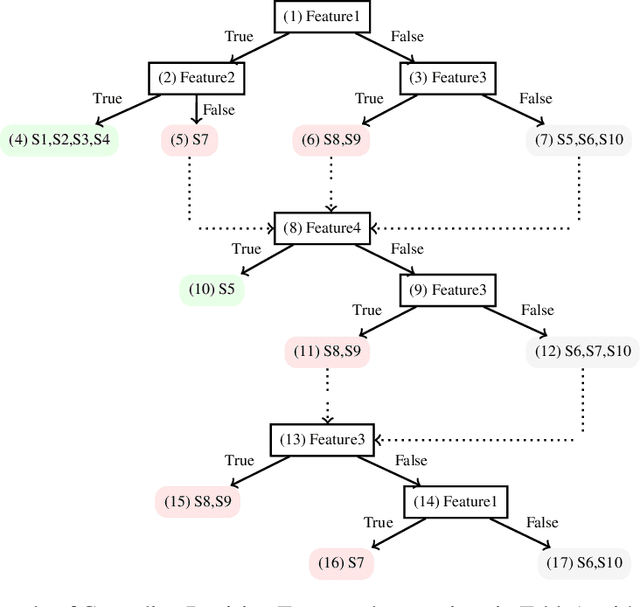

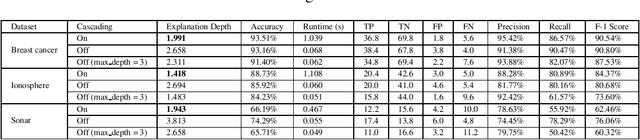
Classic decision tree learning is a binary classification algorithm that constructs models with first-class transparency - every classification has a directly derivable explanation. However, learning decision trees on modern datasets generates large trees, which in turn generate decision paths of excessive depth, obscuring the explanation of classifications. To improve the comprehensibility of classifications, we propose a new decision tree model that we call Cascading Decision Trees. Cascading Decision Trees shorten the size of explanations of classifications, without sacrificing model performance overall. Our key insight is to separate the notion of a decision path and an explanation path. Utilizing this insight, instead of having one monolithic decision tree, we build several smaller decision subtrees and cascade them in sequence. Our cascading decision subtrees are designed to specifically target explanations for positive classifications. This way each subtree identifies the smallest set of features that can classify as many positive samples as possible, without misclassifying any negative samples. Applying cascading decision trees to new samples results in a significantly shorter and succinct explanation, if one of the subtrees detects a positive classification. In that case, we immediately stop and report the decision path of only the current subtree to the user as an explanation for the classification. We evaluate our algorithm on standard datasets, as well as new real-world applications and find that our model shortens the explanation depth by over 40.8% for positive classifications compared to the classic decision tree model.
Grammar Filtering For Syntax-Guided Synthesis
Feb 07, 2020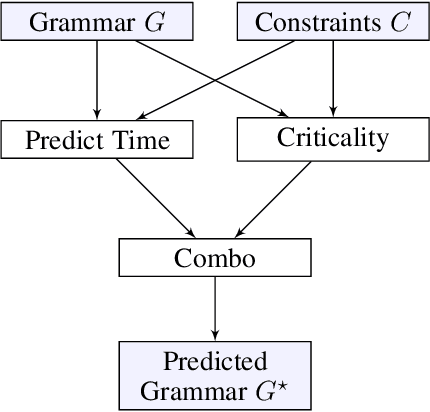
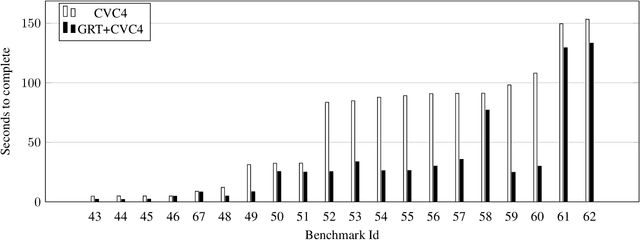
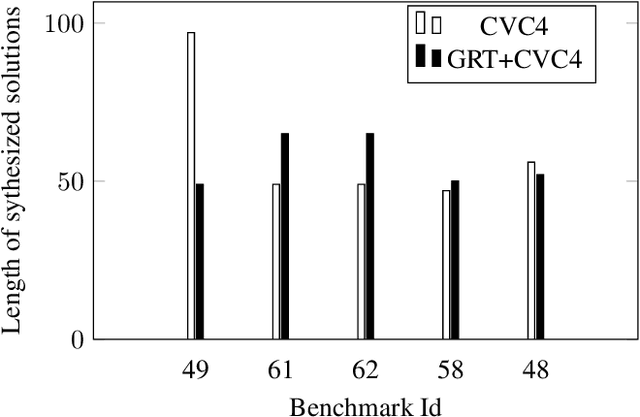
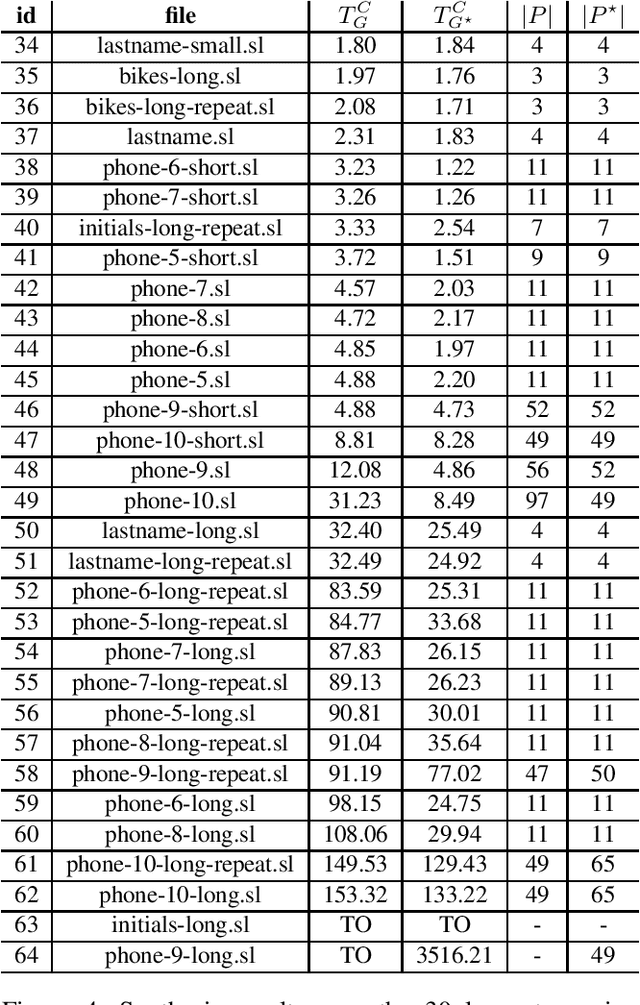
Programming-by-example (PBE) is a synthesis paradigm that allows users to generate functions by simply providing input-output examples. While a promising interaction paradigm, synthesis is still too slow for realtime interaction and more widespread adoption. Existing approaches to PBE synthesis have used automated reasoning tools, such as SMT solvers, as well as works applying machine learning techniques. At its core, the automated reasoning approach relies on highly domain specific knowledge of programming languages. On the other hand, the machine learning approaches utilize the fact that when working with program code, it is possible to generate arbitrarily large training datasets. In this work, we propose a system for using machine learning in tandem with automated reasoning techniques to solve Syntax Guided Synthesis (SyGuS) style PBE problems. By preprocessing SyGuS PBE problems with a neural network, we can use a data driven approach to reduce the size of the search space, then allow automated reasoning-based solvers to more quickly find a solution analytically. Our system is able to run atop existing SyGuS PBE synthesis tools, decreasing the runtime of the winner of the 2019 SyGuS Competition for the PBE Strings track by 47.65% to outperform all of the competing tools.