 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Randomized Reductions and Program Properties
Dec 24, 2024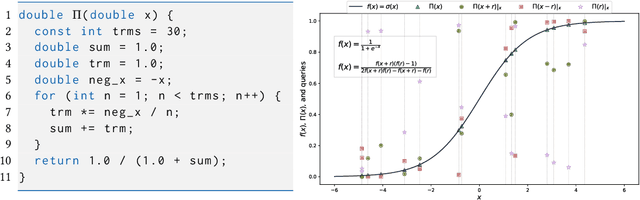
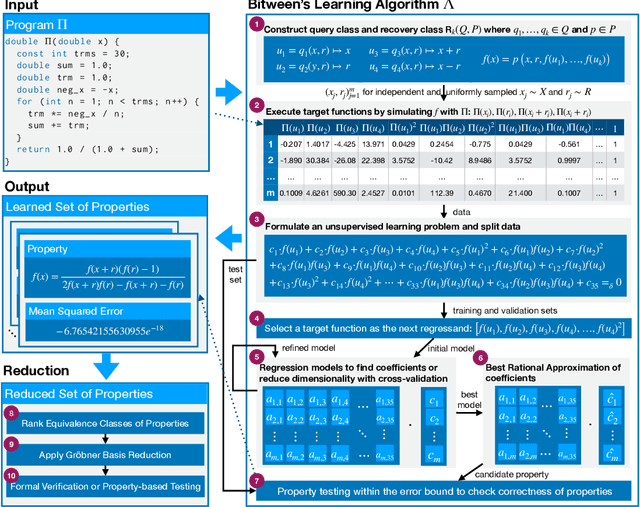
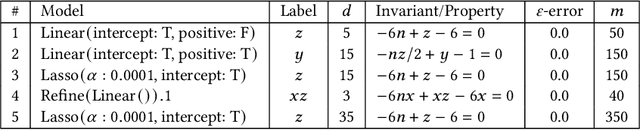

The correctness of computations remains a significant challenge in computer science, with traditional approaches relying on automated testing or formal verification. Self-testing/correcting programs introduce an alternative paradigm, allowing a program to verify and correct its own outputs via randomized reductions, a concept that previously required manual derivation. In this paper, we present Bitween, a method and tool for automated learning of randomized (self)-reductions and program properties in numerical programs. Bitween combines symbolic analysis and machine learning, with a surprising finding: polynomial-time linear regression, a basic optimization method, is not only sufficient but also highly effective for deriving complex randomized self-reductions and program invariants, often outperforming sophisticated mixed-integer linear programming solvers. We establish a theoretical framework for learning these reductions and introduce RSR-Bench, a benchmark suite for evaluating Bitween's capabilities on scientific and machine learning functions. Our empirical results show that Bitween surpasses state-of-the-art tools in scalability, stability, and sample efficiency when evaluated on nonlinear invariant benchmarks like NLA-DigBench. Bitween is open-source as a Python package and accessible via a web interface that supports C language programs.
Analyzing Intentional Behavior in Autonomous Agents under Uncertainty
Jul 04, 2023Principled accountability for autonomous decision-making in uncertain environments requires distinguishing intentional outcomes from negligent designs from actual accidents. We propose analyzing the behavior of autonomous agents through a quantitative measure of the evidence of intentional behavior. We model an uncertain environment as a Markov Decision Process (MDP). For a given scenario, we rely on probabilistic model checking to compute the ability of the agent to influence reaching a certain event. We call this the scope of agency. We say that there is evidence of intentional behavior if the scope of agency is high and the decisions of the agent are close to being optimal for reaching the event. Our method applies counterfactual reasoning to automatically generate relevant scenarios that can be analyzed to increase the confidence of our assessment. In a case study, we show how our method can distinguish between 'intentional' and 'accidental' traffic collisions.