 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCacheWeaver: Cache-Aware Evidence Ordering for Efficient Grounded RAG Inference
Jun 18, 2026Retrieval-Augmented Generation (RAG) improves factual grounding, but it also lengthens prompts and raises prefill cost. Prefix caching in serving engines such as vLLM reduces this cost only when requests share the same token prefix. In grounded generation, however, adjacent queries may retrieve overlapping evidence in different orders, so set overlap does not become reusable prefix overlap. We present CacheWeaver, a lightweight prompt-layer method for cache-aware evidence ordering. The method keeps a prefix tree over recently served evidence sequences and uses a greedy walk to place the most reusable prefix first, while leaving the serving engine and retrieved evidence set unchanged. Across three vLLM configurations, the method lowers median time-to-first-token (TTFT) by about 20-33 percent relative to retrieval-order prefix caching, without hurting answer quality in our QA tests. The greedy policy reaches 97.5 percent of the median TTFT gain from oracle ordering, indicating that most reusable prefix locality can be recovered by a simple scheduling layer between retrieval and inference.
OrchANN: A Unified I/O Orchestration Framework for Skewed Out-of-Core Vector Search
Dec 28, 2025Approximate nearest neighbor search (ANNS) at billion scale is fundamentally an out-of-core problem: vectors and indexes live on SSD, so performance is dominated by I/O rather than compute. Under skewed semantic embeddings, existing out-of-core systems break down: a uniform local index mismatches cluster scales, static routing misguides queries and inflates the number of probed partitions, and pruning is incomplete at the cluster level and lossy at the vector level, triggering "fetch-to-discard" reranking on raw vectors. We present OrchANN, an out-of-core ANNS engine that uses an I/O orchestration model for unified I/O governance along the route-access-verify pipeline. OrchANN selects a heterogeneous local index per cluster via offline auto-profiling, maintains a query-aware in-memory navigation graph that adapts to skewed workloads, and applies multi-level pruning with geometric bounds to filter both clusters and vectors before issuing SSD reads. Across five standard datasets under strict out-of-core constraints, OrchANN outperforms four baselines including DiskANN, Starling, SPANN, and PipeANN in both QPS and latency while reducing SSD accesses. Furthermore, OrchANN delivers up to 17.2x higher QPS and 25.0x lower latency than competing systems without sacrificing accuracy.
BOASF: A Unified Framework for Speeding up Automatic Machine Learning via Adaptive Successive Filtering
Jul 28, 2025Machine learning has been making great success in many application areas. However, for the non-expert practitioners, it is always very challenging to address a machine learning task successfully and efficiently. Finding the optimal machine learning model or the hyperparameter combination set from a large number of possible alternatives usually requires considerable expert knowledge and experience. To tackle this problem, we propose a combined Bayesian Optimization and Adaptive Successive Filtering algorithm (BOASF) under a unified multi-armed bandit framework to automate the model selection or the hyperparameter optimization. Specifically, BOASF consists of multiple evaluation rounds in each of which we select promising configurations for each arm using the Bayesian optimization. Then, ASF can early discard the poor-performed arms adaptively using a Gaussian UCB-based probabilistic model. Furthermore, a Softmax model is employed to adaptively allocate available resources for each promising arm that advances to the next round. The arm with a higher probability of advancing will be allocated more resources. Experimental results show that BOASF is effective for speeding up the model selection and hyperparameter optimization processes while achieving robust and better prediction performance than the existing state-of-the-art automatic machine learning methods. Moreover, BOASF achieves better anytime performance under various time budgets.
Chordless Structure: A Pathway to Simple and Expressive GNNs
May 25, 2025Researchers have proposed various methods of incorporating more structured information into the design of Graph Neural Networks (GNNs) to enhance their expressiveness. However, these methods are either computationally expensive or lacking in provable expressiveness. In this paper, we observe that the chords increase the complexity of the graph structure while contributing little useful information in many cases. In contrast, chordless structures are more efficient and effective for representing the graph. Therefore, when leveraging the information of cycles, we choose to omit the chords. Accordingly, we propose a Chordless Structure-based Graph Neural Network (CSGNN) and prove that its expressiveness is strictly more powerful than the k-hop GNN (KPGNN) with polynomial complexity. Experimental results on real-world datasets demonstrate that CSGNN outperforms existing GNNs across various graph tasks while incurring lower computational costs and achieving better performance than the GNNs of 3-WL expressiveness.
FlashForge: Ultra-Efficient Prefix-Aware Attention for LLM Decoding
May 23, 2025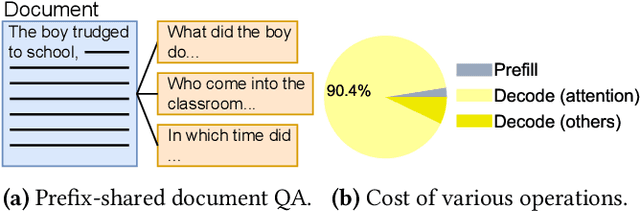
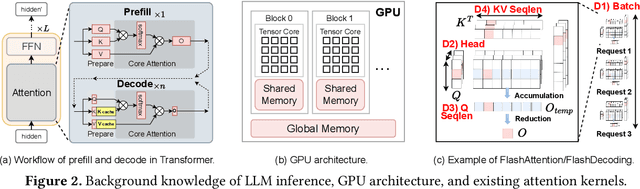
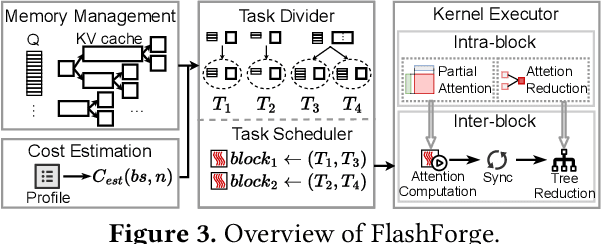
Prefix-sharing among multiple prompts presents opportunities to combine the operations of the shared prefix, while attention computation in the decode stage, which becomes a critical bottleneck with increasing context lengths, is a memory-intensive process requiring heavy memory access on the key-value (KV) cache of the prefixes. Therefore, in this paper, we explore the potential of prefix-sharing in the attention computation of the decode stage. However, the tree structure of the prefix-sharing mechanism presents significant challenges for attention computation in efficiently processing shared KV cache access patterns while managing complex dependencies and balancing irregular workloads. To address the above challenges, we propose a dedicated attention kernel to combine the memory access of shared prefixes in the decoding stage, namely FlashForge. FlashForge delivers two key innovations: a novel shared-prefix attention kernel that optimizes memory hierarchy and exploits both intra-block and inter-block parallelism, and a comprehensive workload balancing mechanism that efficiently estimates cost, divides tasks, and schedules execution. Experimental results show that FlashForge achieves an average 1.9x speedup and 120.9x memory access reduction compared to the state-of-the-art FlashDecoding kernel regarding attention computation in the decode stage and 3.8x end-to-end time per output token compared to the vLLM.
Composable Strategy Framework with Integrated Video-Text based Large Language Models for Heart Failure Assessment
Feb 23, 2025



Heart failure is one of the leading causes of death worldwide, with millons of deaths each year, according to data from the World Health Organization (WHO) and other public health agencies. While significant progress has been made in the field of heart failure, leading to improved survival rates and improvement of ejection fraction, there remains substantial unmet needs, due to the complexity and multifactorial characteristics. Therefore, we propose a composable strategy framework for assessment and treatment optimization in heart failure. This framework simulates the doctor-patient consultation process and leverages multi-modal algorithms to analyze a range of data, including video, physical examination, text results as well as medical history. By integrating these various data sources, our framework offers a more holistic evaluation and optimized treatment plan for patients. Our results demonstrate that this multi-modal approach outperforms single-modal artificial intelligence (AI) algorithms in terms of accuracy in heart failure (HF) prognosis prediction. Through this method, we can further evaluate the impact of various pathological indicators on HF prognosis,providing a more comprehensive evaluation.
Model Checking for Reinforcement Learning in Autonomous Driving: One Can Do More Than You Think!
Nov 21, 2024



Most reinforcement learning (RL) platforms use high-level programming languages, such as OpenAI Gymnasium using Python. These frameworks provide various API and benchmarks for testing RL algorithms in different domains, such as autonomous driving (AD) and robotics. These platforms often emphasise the design of RL algorithms and the training performance but neglect the correctness of models and reward functions, which can be crucial for the successful application of RL. This paper proposes using formal methods to model AD systems and demonstrates how model checking (MC) can be used in RL for AD. Most studies combining MC and RL focus on safety, such as safety shields. However, this paper shows different facets where MC can strengthen RL. First, an MC-based model pre-analysis can reveal bugs with respect to sensor accuracy and learning step size. This step serves as a preparation of RL, which saves time if bugs exist and deepens users' understanding of the target system. Second, reward automata can benefit the design of reward functions and greatly improve learning performance especially when the learning objectives are multiple. All these findings are supported by experiments.
* In Proceedings FMAS2024, arXiv:2411.13215
Revisiting SLO and Goodput Metrics in LLM Serving
Oct 18, 2024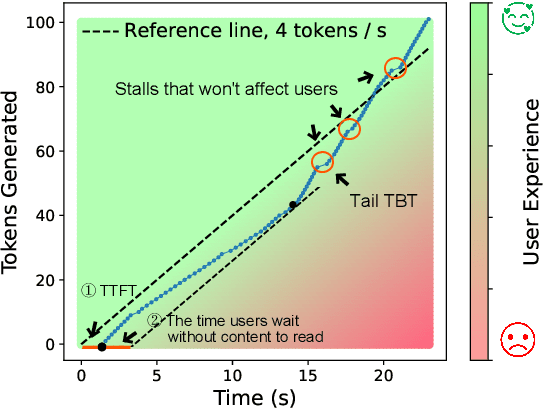

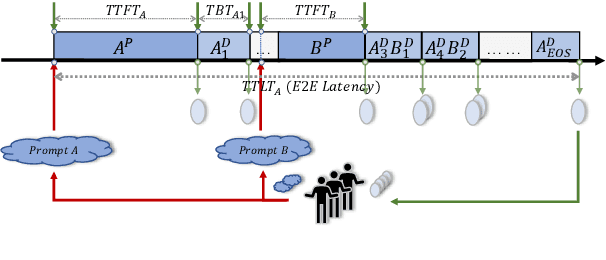
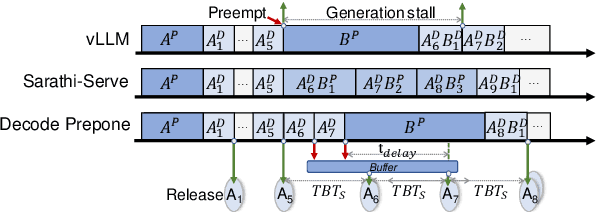
Large language models (LLMs) have achieved remarkable performance and are widely deployed in various applications, while the serving of LLM inference has raised concerns about user experience and serving throughput. Accordingly, service level objectives (SLOs) and goodput-the number of requests that meet SLOs per second-are introduced to evaluate the performance of LLM serving. However, existing metrics fail to capture the nature of user experience. We observe two ridiculous phenomena in existing metrics: 1) delaying token delivery can smooth the tail time between tokens (tail TBT) of a request and 2) dropping the request that fails to meet the SLOs midway can improve goodput. In this paper, we revisit SLO and goodput metrics in LLM serving and propose a unified metric framework smooth goodput including SLOs and goodput to reflect the nature of user experience in LLM serving. The framework can adapt to specific goals of different tasks by setting parameters. We re-evaluate the performance of different LLM serving systems under multiple workloads based on this unified framework and provide possible directions for future optimization of existing strategies. We hope that this framework can provide a unified standard for evaluating LLM serving and foster researches in the field of LLM serving optimization to move in a cohesive direction.
CommonUppRoad: A Framework of Formal Modelling, Verifying, Learning, and Visualisation of Autonomous Vehicles
Aug 02, 2024



Combining machine learning and formal methods (FMs) provides a possible solution to overcome the safety issue of autonomous driving (AD) vehicles. However, there are gaps to be bridged before this combination becomes practically applicable and useful. In an attempt to facilitate researchers in both FMs and AD areas, this paper proposes a framework that combines two well-known tools, namely CommonRoad and UPPAAL. On the one hand, CommonRoad can be enhanced by the rigorous semantics of models in UPPAAL, which enables a systematic and comprehensive understanding of the AD system's behaviour and thus strengthens the safety of the system. On the other hand, controllers synthesised by UPPAAL can be visualised by CommonRoad in real-world road networks, which facilitates AD vehicle designers greatly adopting formal models in system design. In this framework, we provide automatic model conversions between CommonRoad and UPPAAL. Therefore, users only need to program in Python and the framework takes care of the formal models, learning, and verification in the backend. We perform experiments to demonstrate the applicability of our framework in various AD scenarios, discuss the advantages of solving motion planning in our framework, and show the scalability limit and possible solutions.
Semi-supervised Embedding Learning for High-dimensional Bayesian Optimization
May 29, 2020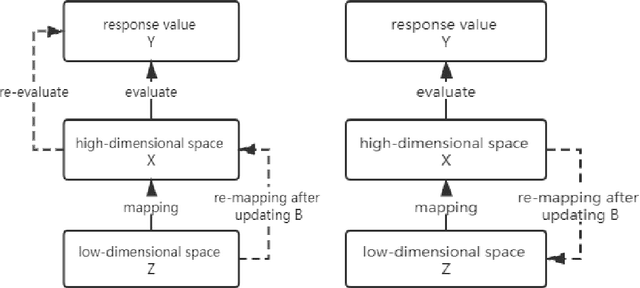
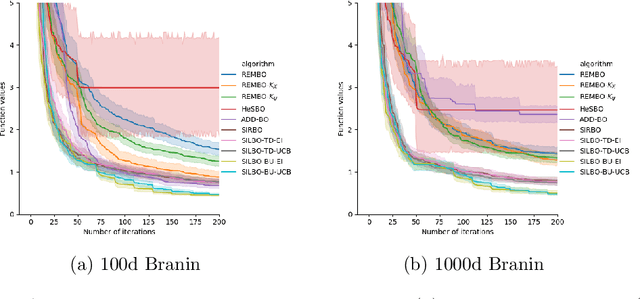
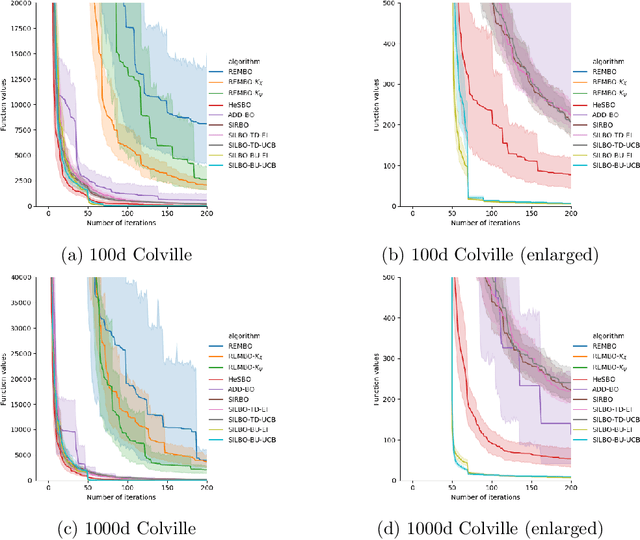
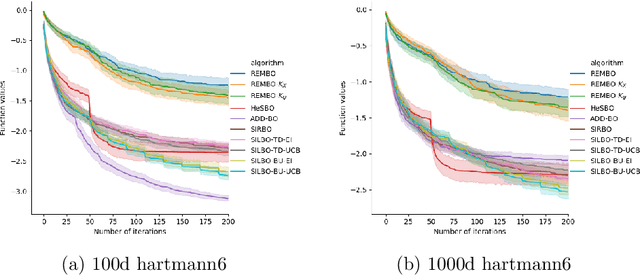
Bayesian optimization is a broadly applied methodology to optimize the expensive black-box function. Despite its success, it still faces the challenge from the high-dimensional search space. To alleviate this problem, we propose a novel Bayesian optimization framework (termed SILBO), which finds a low-dimensional space to perform Bayesian optimization iteratively through semi-supervised dimension reduction. SILBO incorporates both labeled points and unlabeled points acquired from the acquisition function to guide the embedding space learning. To accelerate the learning procedure, we present a randomized method for generating the projection matrix. Furthermore, to map from the low-dimensional space to the high-dimensional original space, we propose two mapping strategies: $\text{SILBO}_{FZ}$ and $\text{SILBO}_{FX}$ according to the evaluation overhead of the objective function. Experimental results on both synthetic function and hyperparameter optimization tasks demonstrate that SILBO outperforms the existing state-of-the-art high-dimensional Bayesian optimization methods.