 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommonUppRoad: A Framework of Formal Modelling, Verifying, Learning, and Visualisation of Autonomous Vehicles
Aug 02, 2024



Combining machine learning and formal methods (FMs) provides a possible solution to overcome the safety issue of autonomous driving (AD) vehicles. However, there are gaps to be bridged before this combination becomes practically applicable and useful. In an attempt to facilitate researchers in both FMs and AD areas, this paper proposes a framework that combines two well-known tools, namely CommonRoad and UPPAAL. On the one hand, CommonRoad can be enhanced by the rigorous semantics of models in UPPAAL, which enables a systematic and comprehensive understanding of the AD system's behaviour and thus strengthens the safety of the system. On the other hand, controllers synthesised by UPPAAL can be visualised by CommonRoad in real-world road networks, which facilitates AD vehicle designers greatly adopting formal models in system design. In this framework, we provide automatic model conversions between CommonRoad and UPPAAL. Therefore, users only need to program in Python and the framework takes care of the formal models, learning, and verification in the backend. We perform experiments to demonstrate the applicability of our framework in various AD scenarios, discuss the advantages of solving motion planning in our framework, and show the scalability limit and possible solutions.
Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning
Jun 11, 2024



This study presents an innovative approach to optimal gait control for a soft quadruped robot enabled by four Compressible Tendon-driven Soft Actuators (CTSAs). Improving our previous studies of using model-free reinforcement learning for gait control, we employ model-based reinforcement learning (MBRL) to further enhance the performance of the gait controller. Compared to rigid robots, the proposed soft quadruped robot has better safety, less weight, and a simpler mechanism for fabrication and control. However, the primary challenge lies in developing sophisticated control algorithms to attain optimal gait control for fast and stable locomotion. The research employs a multi-stage methodology, including state space restriction, data-driven model training, and reinforcement learning algorithm development. Compared to benchmark methods, the proposed MBRL algorithm, combined with post-training, significantly improves the efficiency and performance of gait control policies. The developed policy is both robust and adaptable to the robot's deformable morphology. The study concludes by highlighting the practical applicability of these findings in real-world scenarios.
Optimal Gait Design for a Soft Quadruped Robot via Multi-fidelity Bayesian Optimization
Jun 11, 2024



This study focuses on the locomotion capability improvement in a tendon-driven soft quadruped robot through an online adaptive learning approach. Leveraging the inverse kinematics model of the soft quadruped robot, we employ a central pattern generator to design a parametric gait pattern, and use Bayesian optimization (BO) to find the optimal parameters. Further, to address the challenges of modeling discrepancies, we implement a multi-fidelity BO approach, combining data from both simulation and physical experiments throughout training and optimization. This strategy enables the adaptive refinement of the gait pattern and ensures a smooth transition from simulation to real-world deployment for the controller. Moreover, we integrate a computational task off-loading architecture by edge computing, which reduces the onboard computational and memory overhead, to improve real-time control performance and facilitate an effective online learning process. The proposed approach successfully achieves optimal walking gait design for physical deployment with high efficiency, effectively addressing challenges related to the reality gap in soft robotics.
Finding Critical Scenarios for Automated Driving Systems: A Systematic Literature Review
Oct 16, 2021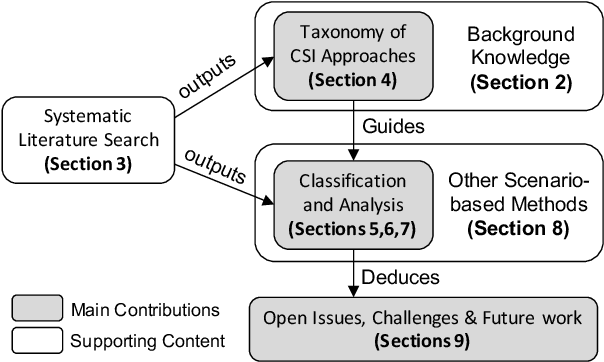
Scenario-based approaches have been receiving a huge amount of attention in research and engineering of automated driving systems. Due to the complexity and uncertainty of the driving environment, and the complexity of the driving task itself, the number of possible driving scenarios that an ADS or ADAS may encounter is virtually infinite. Therefore it is essential to be able to reason about the identification of scenarios and in particular critical ones that may impose unacceptable risk if not considered. Critical scenarios are particularly important to support design, verification and validation efforts, and as a basis for a safety case. In this paper, we present the results of a systematic literature review in the context of autonomous driving. The main contributions are: (i) introducing a comprehensive taxonomy for critical scenario identification methods; (ii) giving an overview of the state-of-the-art research based on the taxonomy encompassing 86 papers between 2017 and 2020; and (iii) identifying open issues and directions for further research. The provided taxonomy comprises three main perspectives encompassing the problem definition (the why), the solution (the methods to derive scenarios), and the assessment of the established scenarios. In addition, we discuss open research issues considering the perspectives of coverage, practicability, and scenario space explosion.
Non-invasive measuring method of skin temperature based on skin sensitivity index and deep learning
Dec 16, 2018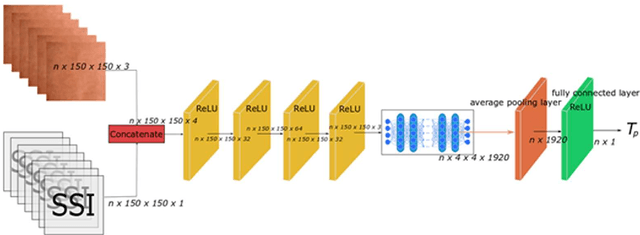
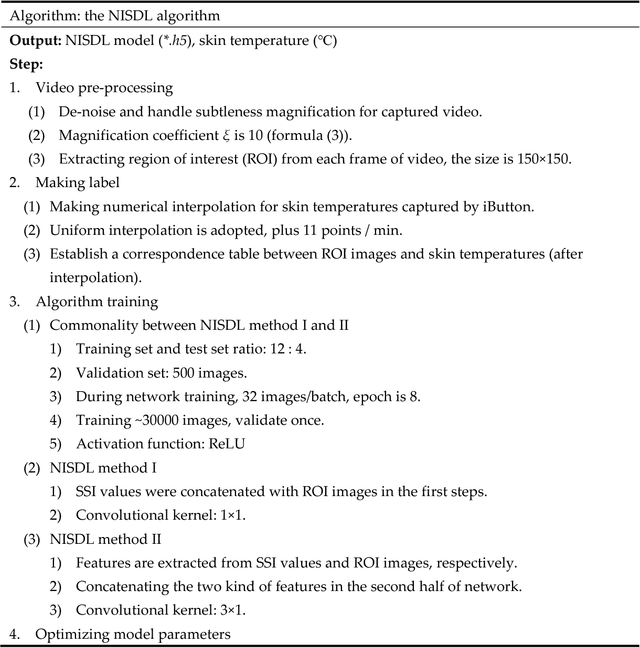
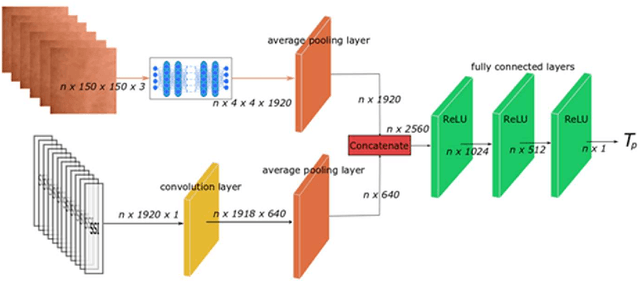
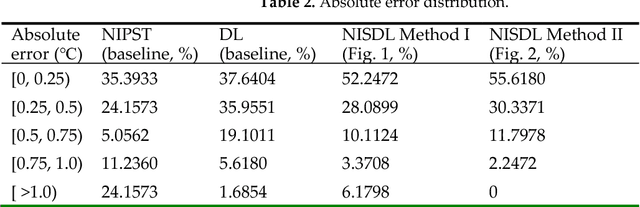
In human-centered intelligent building, real-time measurements of human thermal comfort play critical roles and supply feedback control signals for building heating, ventilation, and air conditioning (HVAC) systems. Due to the challenges of intra- and inter-individual differences and skin subtleness variations, there is no satisfactory solution for thermal comfort measurements until now. In this paper, a non-invasive measuring method based on skin sensitivity index and deep learning (NISDL) was proposed to measure real-time skin temperature. A new evaluating index, named skin sensitivity index (SSI), was defined to overcome individual differences and skin subtleness variations. To illustrate the effectiveness of SSI proposed, two multi-layers deep learning framework (NISDL method I and II) was designed and the DenseNet201 was used for extracting features from skin images. The partly personal saturation temperature (NIPST) algorithm was use for algorithm comparisons. Another deep learning algorithm without SSI (DL) was also generated for algorithm comparisons. Finally, a total of 1.44 million image data was used for algorithm validation. The results show that 55.6180% and 52.2472% error values (NISDL method I, II) are scattered at [0, 0.25), and the same error intervals distribution of NIPST is 35.3933%.