 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Critical Scenarios for Automated Driving Systems: A Systematic Literature Review
Oct 16, 2021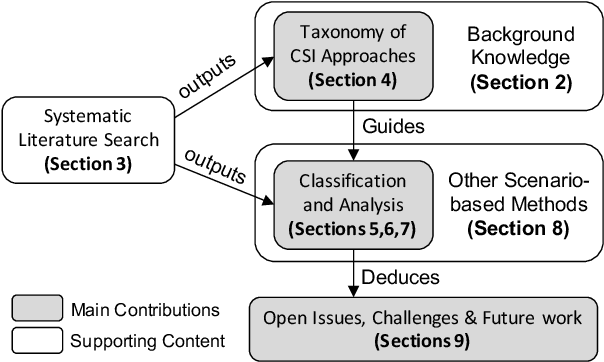
Scenario-based approaches have been receiving a huge amount of attention in research and engineering of automated driving systems. Due to the complexity and uncertainty of the driving environment, and the complexity of the driving task itself, the number of possible driving scenarios that an ADS or ADAS may encounter is virtually infinite. Therefore it is essential to be able to reason about the identification of scenarios and in particular critical ones that may impose unacceptable risk if not considered. Critical scenarios are particularly important to support design, verification and validation efforts, and as a basis for a safety case. In this paper, we present the results of a systematic literature review in the context of autonomous driving. The main contributions are: (i) introducing a comprehensive taxonomy for critical scenario identification methods; (ii) giving an overview of the state-of-the-art research based on the taxonomy encompassing 86 papers between 2017 and 2020; and (iii) identifying open issues and directions for further research. The provided taxonomy comprises three main perspectives encompassing the problem definition (the why), the solution (the methods to derive scenarios), and the assessment of the established scenarios. In addition, we discuss open research issues considering the perspectives of coverage, practicability, and scenario space explosion.
Architecting Safe Automated Driving with Legacy Platforms
Dec 10, 2019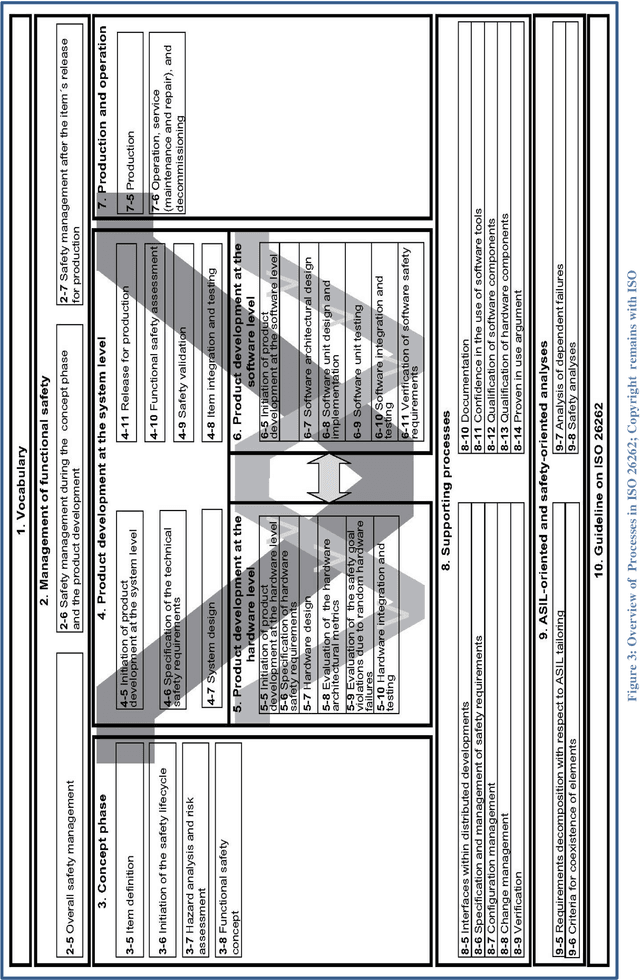

Modern vehicles have electrical architectures whose complexity grows year after year due to feature growth corresponding to customer expectations. The latest of the expectations, automation of the dynamic driving task however, is poised to bring about some of the largest changes seen so far. In one fell swoop, not only does required functionality for automated driving drastically increase the system complexity, it also removes the fall-back of the human driver who is usually relied upon to handle unanticipated failures after the fact. The need to architect thus requires a greater rigour than ever before, to maintain the level of safety that has been associated with the automotive industry. The work that is part of this thesis has been conducted, in close collaboration with our industrial partner Scania CV AB, within the Vinnova FFI funded project ARCHER. This thesis aims to provide a methodology for architecting during the concept phase of development, using industrial practices and principles including those from safety standards such as ISO 26262. The main contributions of the thesis are in two areas. The first area i.e. Part A contributes, (i) an analysis of the challenges of architecting automated driving, and serves as a motivation for the approach taken in the rest of this thesis, i.e. Part B where the contributions include, (ii) a definition of a viewpoint for functional safety according to the definitions of ISO 42010, (iii) a method to systematically extract information from legacy components and (iv) a process to use legacy information and architect in the presence of uncertainty to provide a work product, the Preliminary Architectural Assumptions (PAA), as required by ISO 26262. The contributions of Part B together comprise a methodology to architect the PAA. <read full abstract in pdf>
A Method towards the Systematic Architecting of Functionally Safe Automated Driving -- Leveraging Diagnostic Specifications for FSC design
Dec 06, 2019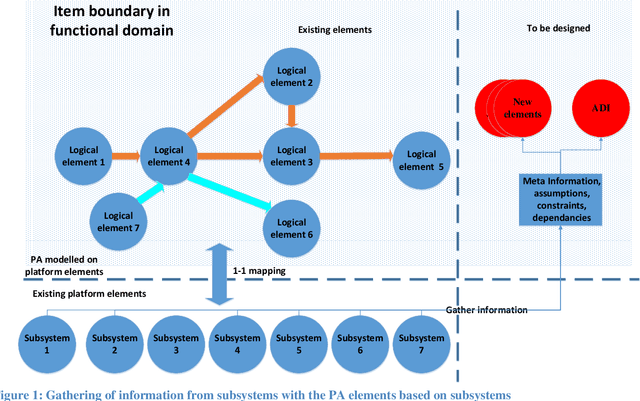
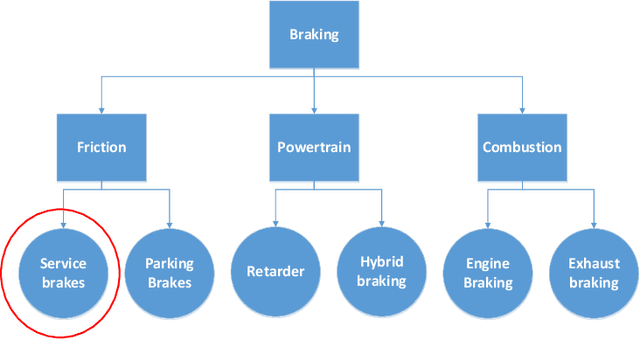
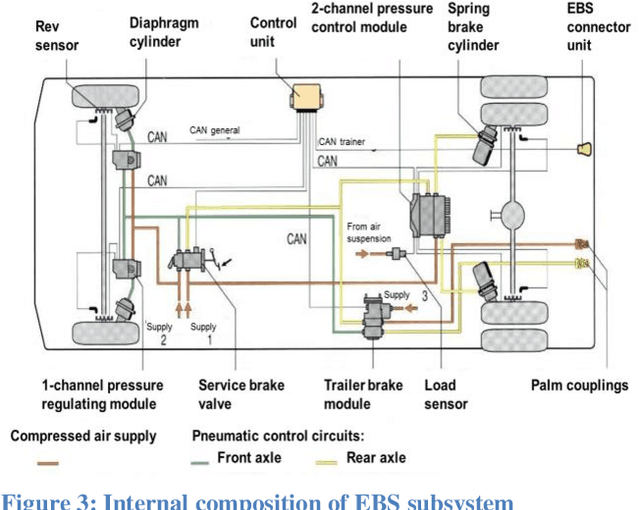
With the advent of ISO 26262 there is an increased emphasis on top-down design in the automotive industry. ISO 26262 lacks detailed requirements for its various constituent phases. The lack of guidance becomes evident for the reuse of legacy components and subsystems, leaving vehicle architects and safety engineers to rely on experience without methodological support for their decisions. This poses challenges in the industry which is undergoing many significant changes due to new features like connectivity, electrification and automation. Here we focus on automated driving where multiple subsystems, both new and legacy, need to coordinate to realize a safety-critical function. This paper introduces a method to support consistent design of an ISO 26262 work product, the Functional Safety Concept (FSC). The method addresses a need within the industry for architectural analysis, rationale management and reuse of legacy subsystems. The method makes use of an existing work product, the diagnostic specifications of a subsystem, to assist in performing a systematic assessment of the influence a human driver, in the design of the subsystem. The output of the method is a report with an abstraction level suitable for a vehicle architect, used as a basis for decisions related to the FSC such as generating a Preliminary Architecture (PA) and building up argumentation for verification of the FSC. The proposed method is tested in a safety-critical braking subsystem at one of the largest heavy vehicle manufacturers in Sweden, Scania C.V. AB. The results demonstrate the benefits of the method including (i) reuse of pre-existing work products, (ii) gathering requirements for automated driving functions while designing the PA and FSC, (iii) the parallelization of work across the organization on the basis of expertise, and (iv) the applicability of the method across all types of subsystems.
Architecting Safety Supervisors for High Levels of Automated Driving
Dec 05, 2019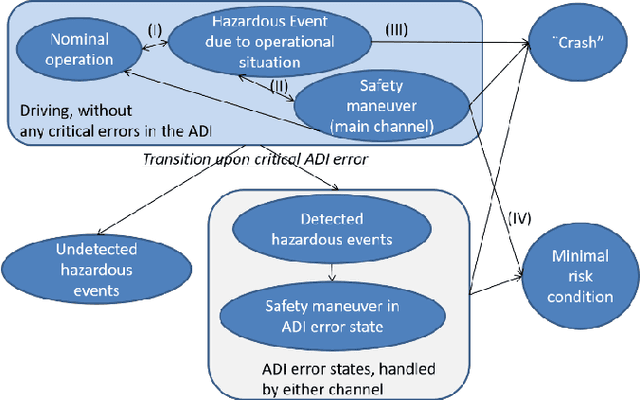
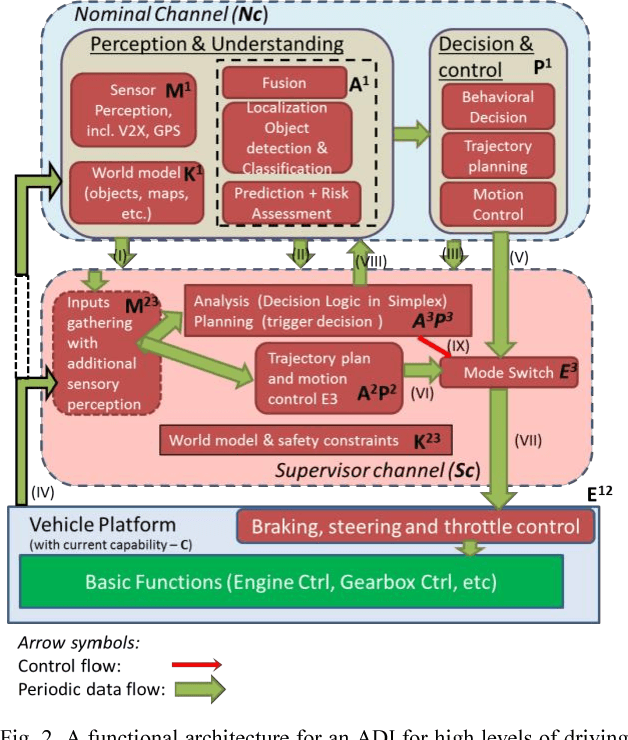
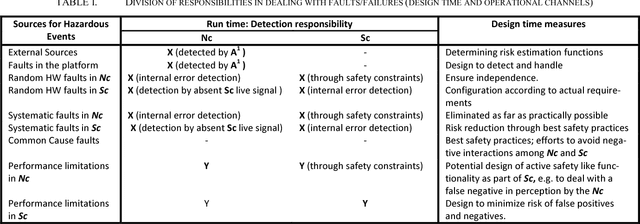
The complexity of automated driving poses challenges for providing safety assurance. Focusing on the architecting of an Autonomous Driving Intelligence (ADI), i.e. the computational intelligence, sensors and communication needed for high levels of automated driving, we investigate so called safety supervisors that complement the nominal functionality. We present a problem formulation and a functional architecture of a fault-tolerant ADI that encompasses a nominal and a safety supervisor channel. We then discuss the sources of hazardous events, the division of responsibilities among the channels, and when the supervisor should take over. We conclude with identified directions for further work.
Applying systems-theoretic process analysis in the context of cooperative driving
Dec 04, 2019Highly automated, cooperative driving vehicles will allow for a more fluid flow of traffic, resulting in more efficient, eco-friendly and safe traffic situations. The automotive industry however, is safety critical and current safety standards were not designed to deal with cooperative driving. In this paper, we apply a modern safety analysis method, Systems-Theoretic Process Analysis, in the context of cooperative driving as part of the Grand Cooperative Driving Challenge (GCDC) and present our reflections on the method.
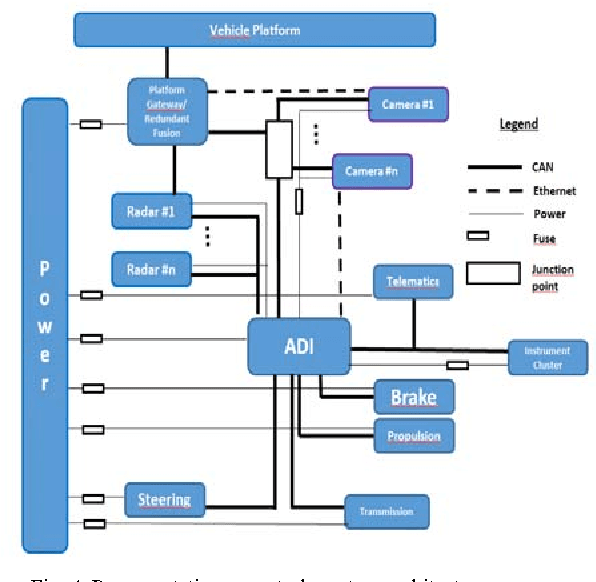
Challenges in Architecting Fully Automated Driving; with an Emphasis on Heavy Commercial Vehicles
Dec 04, 2019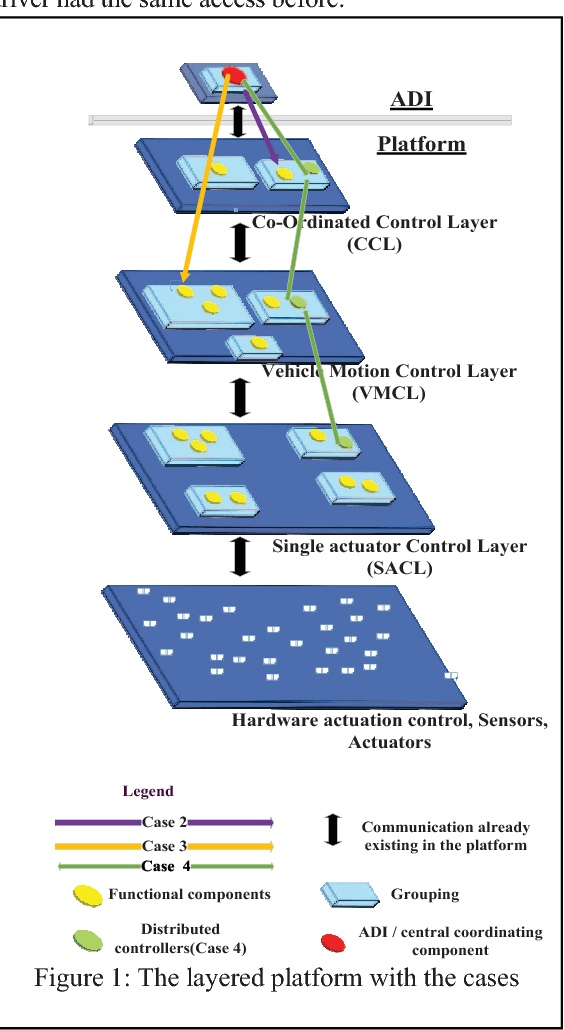
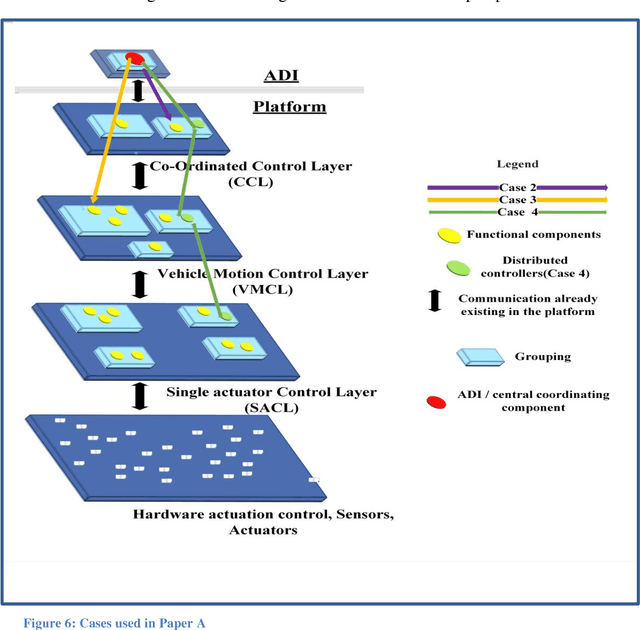
Fully automated vehicles will require new functionalities for perception, navigation and decision making -- an Autonomous Driving Intelligence (ADI). We consider architectural cases for such functionalities and investigate how they integrate with legacy platforms. The cases range from a robot replacing the driver -- with entire reuse of existing vehicle platforms, to a clean-slate design. Focusing on Heavy Commercial Vehicles (HCVs), we assess these cases from the perspectives of business, safety, dependability, verification, and realization. The original contributions of this paper are the classification of the architectural cases themselves and the analysis that follows. The analysis reveals that although full reuse of vehicle platforms is appealing, it will require explicitly dealing with the accidental complexity of the legacy platforms, including adding corresponding diagnostics and error handling to the ADI. The current fail-safe design of the platform will also tend to limit availability. Allowing changes to the platforms, will enable more optimized designs and fault-operational behaviour, but will require initial higher development cost and specific emphasis on partitioning and control to limit the influences of safety requirements. For all cases, the design and verification of the ADI will pose a grand challenge and relate to the evolution of the regulatory framework including safety standards.
ATRIUM -- Architecting Under Uncertainty for ISO 26262 compliance
Dec 04, 2019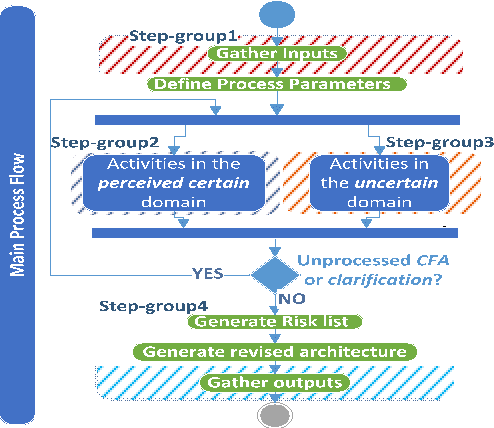
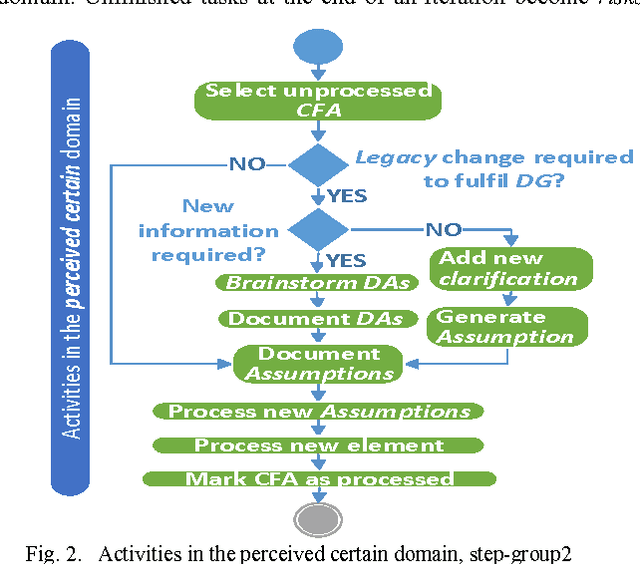
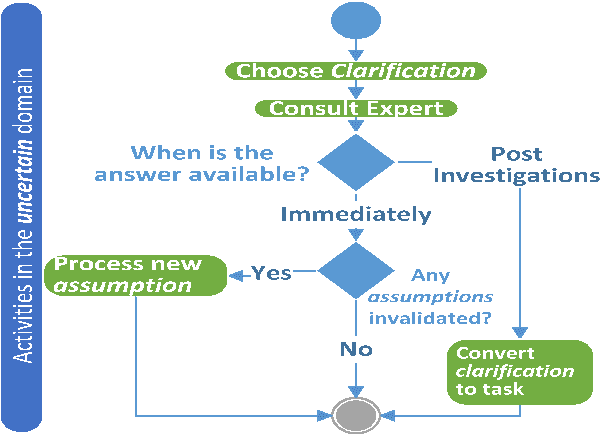
The ISO 26262 is currently the dominant standard for assuring functional safety of electrical and electronic systems in the automotive industry. The Functional Safety Concept (FSC) subphase in the standard requires the Preliminary Architectural Assumptions (PAA) for allocation of functional safety requirements (FSRs). This paper justifies the need for, and defines a process ATRIUM, for consistent design of the PAA. ATRIUM is subsequently applied in an industrial case study for a function enabling highly automated driving at one of the largest heavy vehicle manufacturers in Europe, Scania CV AB. The findings from this study, which contributed to ATRIUM's institutionalization at Scania, are presented. The benefits of the proposed process include (i) a fast and flexible way to refine the PAA, and a framework to (ii) incorporate information from legacy systems into safety design and (iii) rigorously track and document the assumptions and rationale behind architectural decisions under uncertain information. The contributions of this paper are the (i) analysis of the problem (ii) the process ATRIUM and (iii) findings and the discussion from the case study at Scania. Keywords: ISO 26262, functional safety, automation, HCV, HGV, architectures, highly automated driving, ATRIUM, decision making, architecting, uncertainty management
AD-EYE: A Co-simulation Platform for Early Verification of Functional Safety Concepts
Dec 01, 2019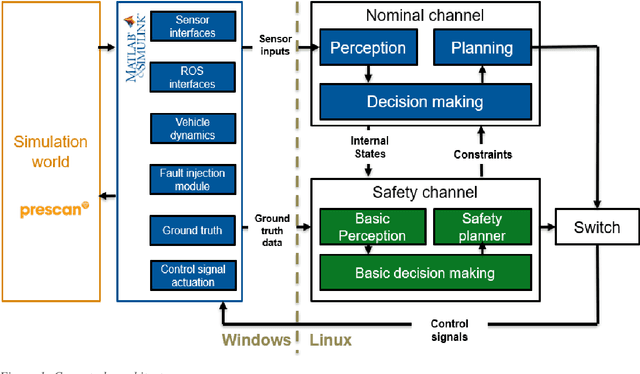
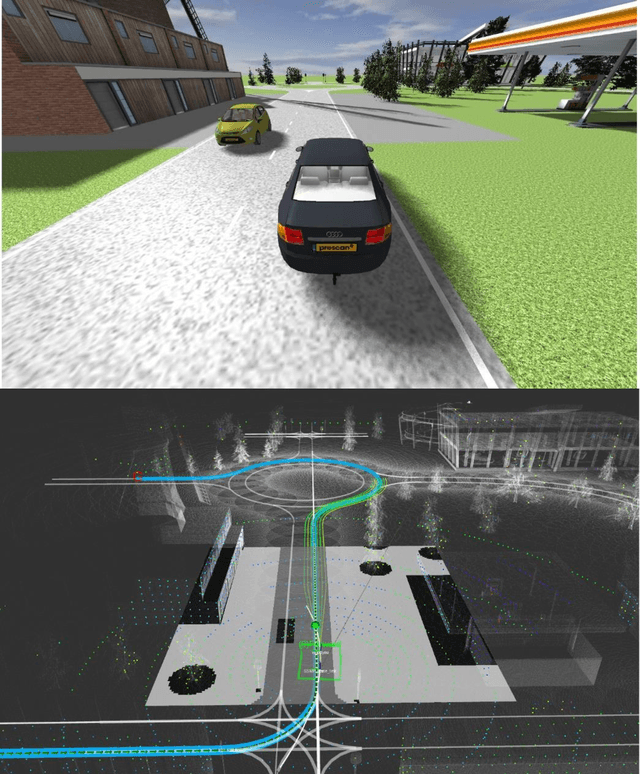
Automated Driving is revolutionizing many of the traditional ways of operation in the automotive industry. The impact on safety engineering of automotive functions is arguably one of the most important changes. There has been a need to re-think the impact of the partial or complete absence of the human driver (in terms of a supervisory entity) in not only newly developed functions but also in the qualification of the use of legacy functions in new contexts. The scope of the variety of scenarios that a vehicle may encounter even within a constrained Operational Design Domain, and the highly dynamic nature of Automated Driving, mean that new methods such as simulation can greatly aid the process of safety engineering. This paper discusses the need for early verification of the Functional Safety Concepts (FSCs), details the information typically available at this stage in the product lifecycle, and proposes a co-simulation platform named AD-EYE designed for exploiting the possibilities in an industrial context by evaluating design decisions and refining Functional Safety Requirements based on a reusable scenario database. Leveraging our prior experiences in developing FSCs for Automated Driving functions, and the preliminary implementation of co-simulation platform, we demonstrate the advantages and identify the limitations of using simulations for refinement and early FSC verification using examples of types of requirements that could benefit from our methodology.
* 12 pages, single column in this preprint