 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTextual Explanations and Their Evaluations for Reinforcement Learning Policy
Jan 05, 2026Understanding a Reinforcement Learning (RL) policy is crucial for ensuring that autonomous agents behave according to human expectations. This goal can be achieved using Explainable Reinforcement Learning (XRL) techniques. Although textual explanations are easily understood by humans, ensuring their correctness remains a challenge, and evaluations in state-of-the-art remain limited. We present a novel XRL framework for generating textual explanations, converting them into a set of transparent rules, improving their quality, and evaluating them. Expert's knowledge can be incorporated into this framework, and an automatic predicate generator is also proposed to determine the semantic information of a state. Textual explanations are generated using a Large Language Model (LLM) and a clustering technique to identify frequent conditions. These conditions are then converted into rules to evaluate their properties, fidelity, and performance in the deployed environment. Two refinement techniques are proposed to improve the quality of explanations and reduce conflicting information. Experiments were conducted in three open-source environments to enable reproducibility, and in a telecom use case to evaluate the industrial applicability of the proposed XRL framework. This framework addresses the limitations of an existing method, Autonomous Policy Explanation, and the generated transparent rules can achieve satisfactory performance on certain tasks. This framework also enables a systematic and quantitative evaluation of textual explanations, providing valuable insights for the XRL field.
Optimal Gait Design for a Soft Quadruped Robot via Multi-fidelity Bayesian Optimization
Jun 11, 2024



This study focuses on the locomotion capability improvement in a tendon-driven soft quadruped robot through an online adaptive learning approach. Leveraging the inverse kinematics model of the soft quadruped robot, we employ a central pattern generator to design a parametric gait pattern, and use Bayesian optimization (BO) to find the optimal parameters. Further, to address the challenges of modeling discrepancies, we implement a multi-fidelity BO approach, combining data from both simulation and physical experiments throughout training and optimization. This strategy enables the adaptive refinement of the gait pattern and ensures a smooth transition from simulation to real-world deployment for the controller. Moreover, we integrate a computational task off-loading architecture by edge computing, which reduces the onboard computational and memory overhead, to improve real-time control performance and facilitate an effective online learning process. The proposed approach successfully achieves optimal walking gait design for physical deployment with high efficiency, effectively addressing challenges related to the reality gap in soft robotics.
Transitional Grid Maps: Efficient Analytical Inference of Dynamic Environments under Limited Sensing
Jan 12, 2024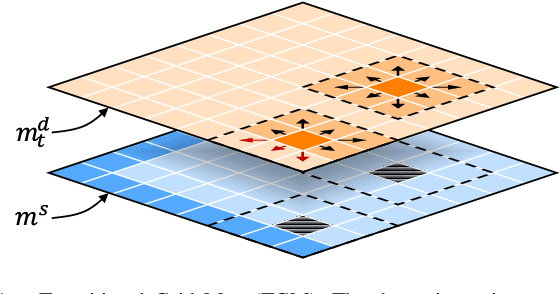


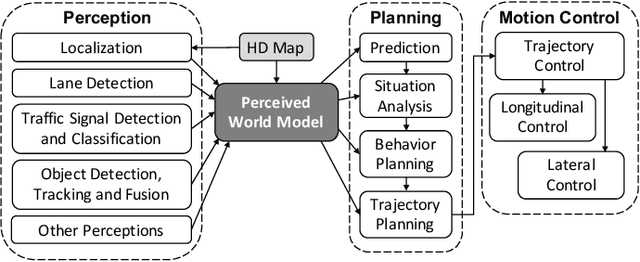
Autonomous agents rely on sensor data to construct representations of their environment, essential for predicting future events and planning their own actions. However, sensor measurements suffer from limited range, occlusions, and sensor noise. These challenges become more evident in dynamic environments, where efficiently inferring the state of the environment based on sensor readings from different times is still an open problem. This work focuses on inferring the state of the dynamic part of the environment, i.e., where dynamic objects might be, based on previous observations and constraints on their dynamics. We formalize the problem and introduce Transitional Grid Maps (TGMs), an efficient analytical solution. TGMs are based on a set of novel assumptions that hold in many practical scenarios. They significantly reduce the complexity of the problem, enabling continuous prediction and updating of the entire dynamic map based on the known static map (see Fig.1), differentiating them from other alternatives. We compare our approach with a state-of-the-art particle filter, obtaining more prudent predictions in occluded scenarios and on-par results on unoccluded tracking.
Finding Critical Scenarios for Automated Driving Systems: A Systematic Literature Review
Oct 16, 2021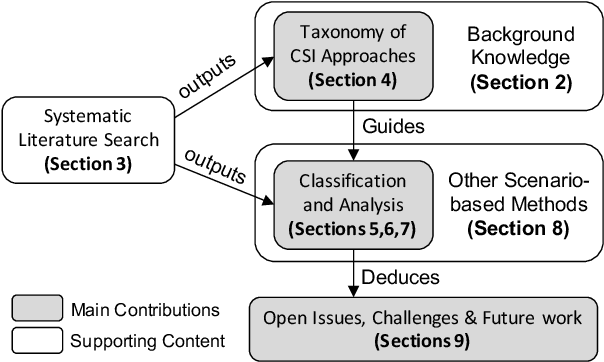
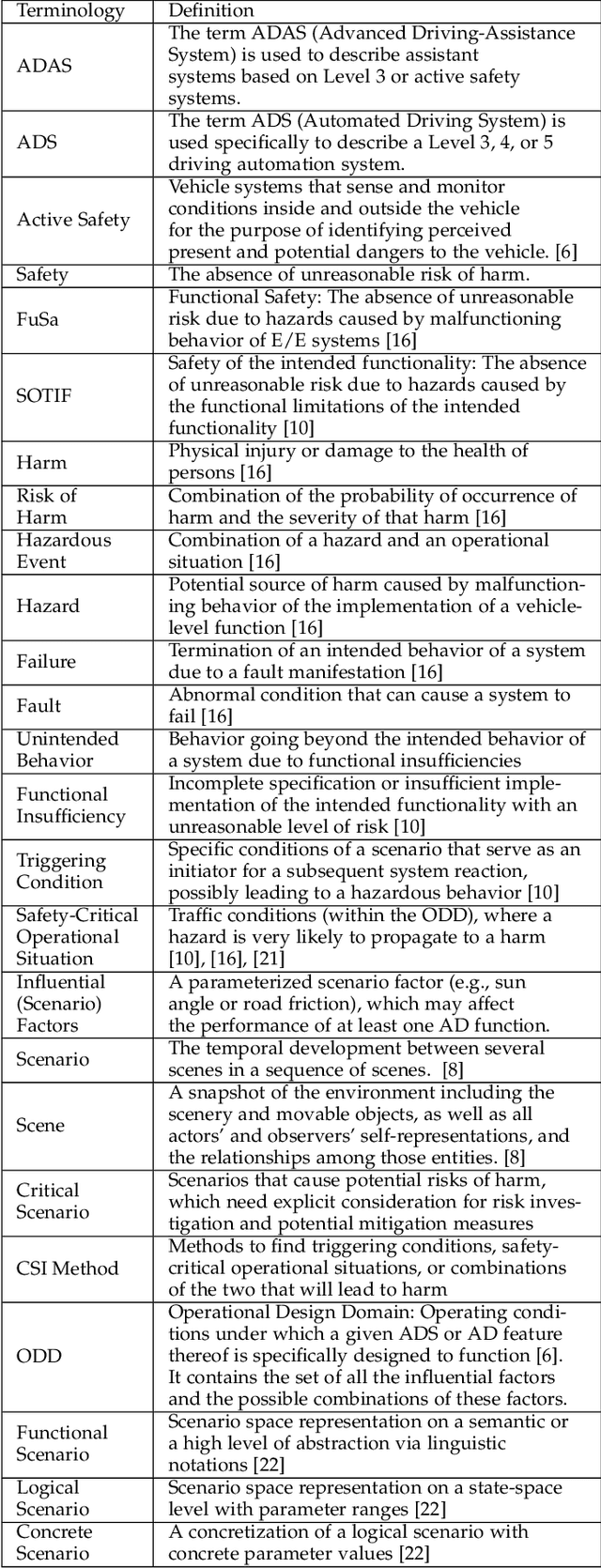
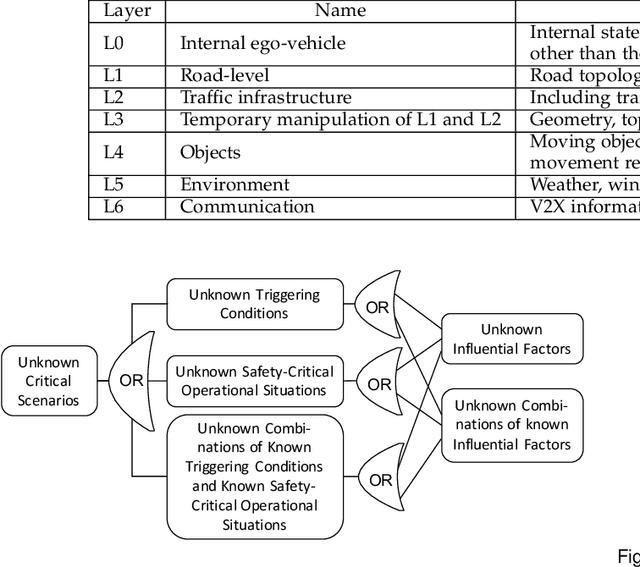
Scenario-based approaches have been receiving a huge amount of attention in research and engineering of automated driving systems. Due to the complexity and uncertainty of the driving environment, and the complexity of the driving task itself, the number of possible driving scenarios that an ADS or ADAS may encounter is virtually infinite. Therefore it is essential to be able to reason about the identification of scenarios and in particular critical ones that may impose unacceptable risk if not considered. Critical scenarios are particularly important to support design, verification and validation efforts, and as a basis for a safety case. In this paper, we present the results of a systematic literature review in the context of autonomous driving. The main contributions are: (i) introducing a comprehensive taxonomy for critical scenario identification methods; (ii) giving an overview of the state-of-the-art research based on the taxonomy encompassing 86 papers between 2017 and 2020; and (iii) identifying open issues and directions for further research. The provided taxonomy comprises three main perspectives encompassing the problem definition (the why), the solution (the methods to derive scenarios), and the assessment of the established scenarios. In addition, we discuss open research issues considering the perspectives of coverage, practicability, and scenario space explosion.
Fusion of Heterogeneous Friction Estimates for Traction Adaptive Motion Planning and Control
May 14, 2021

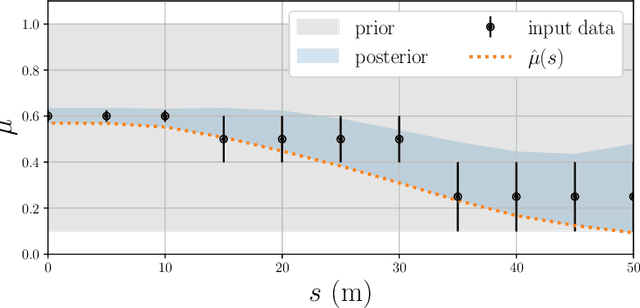

Traction adaptive motion planning and control has potential to improve an an automated vehicle's ability to avoid accident in a critical situation. However, such functionality require an accurate friction estimate for the road ahead of the vehicle that is updated in real time. Current state of the art friction estimation techniques include high accuracy local friction estimation in the presence of tire slip, as well as rough classification of the road surface ahead of the vehicle, based on forward looking camera. In this paper we show that neither of these techniques in isolation yield satisfactory behavior when deployed with traction adaptive motion planning and control functionality. However, fusion of the two provides sufficient accuracy, availability and foresight to yield near optimal behavior. To this end, we propose a fusion method based on heteroscedastic gaussian process regression, and present initial simulation based results.
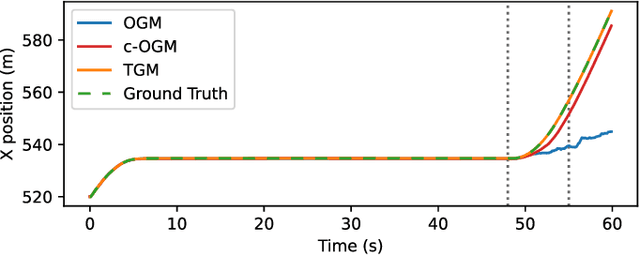
Traction Adaptive Motion Planning at the Limits of Handling
Sep 09, 2020



In this paper we address the problem of motion planning and control at the limits of handling, under locally varying traction conditions. We propose a novel solution method where locally varying traction is represented by time-varying tire force constraints. A constrained finite time optimal control problem is solved in a receding horizon fashion, imposing these time-varying constraints. Furthermore, we employ a sampling augmentation procedure to address the problems of infeasibility and sensitivity to local minima that arises when the constraint configuration is altered. We validate the proposed algorithm on a Volvo FH16 heavy-duty vehicle, in a range of critical scenarios. Experimental results indicate that traction adaptation improves the vehicle's capacity to avoid accidents, both when adapting to low and high local traction.
A Method towards the Systematic Architecting of Functionally Safe Automated Driving -- Leveraging Diagnostic Specifications for FSC design
Dec 06, 2019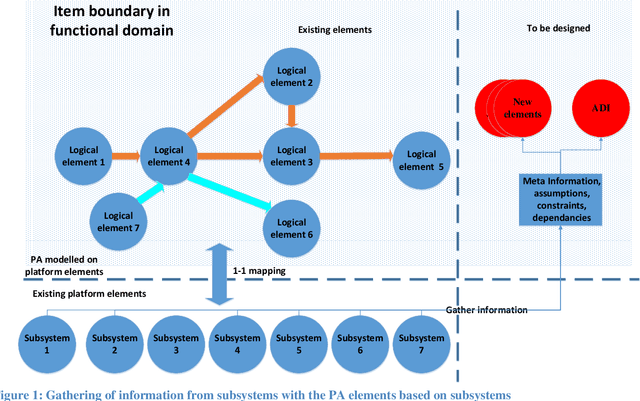
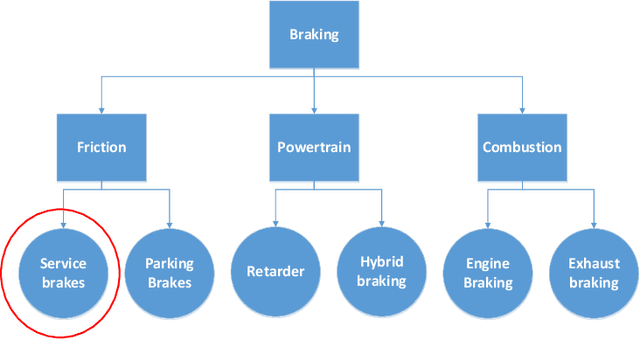
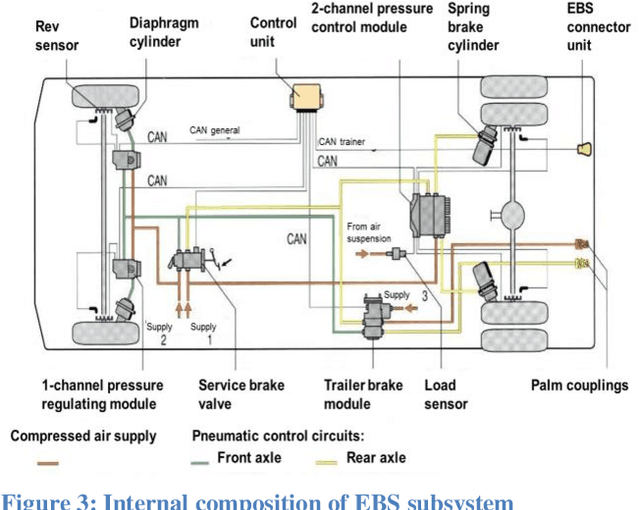
With the advent of ISO 26262 there is an increased emphasis on top-down design in the automotive industry. ISO 26262 lacks detailed requirements for its various constituent phases. The lack of guidance becomes evident for the reuse of legacy components and subsystems, leaving vehicle architects and safety engineers to rely on experience without methodological support for their decisions. This poses challenges in the industry which is undergoing many significant changes due to new features like connectivity, electrification and automation. Here we focus on automated driving where multiple subsystems, both new and legacy, need to coordinate to realize a safety-critical function. This paper introduces a method to support consistent design of an ISO 26262 work product, the Functional Safety Concept (FSC). The method addresses a need within the industry for architectural analysis, rationale management and reuse of legacy subsystems. The method makes use of an existing work product, the diagnostic specifications of a subsystem, to assist in performing a systematic assessment of the influence a human driver, in the design of the subsystem. The output of the method is a report with an abstraction level suitable for a vehicle architect, used as a basis for decisions related to the FSC such as generating a Preliminary Architecture (PA) and building up argumentation for verification of the FSC. The proposed method is tested in a safety-critical braking subsystem at one of the largest heavy vehicle manufacturers in Sweden, Scania C.V. AB. The results demonstrate the benefits of the method including (i) reuse of pre-existing work products, (ii) gathering requirements for automated driving functions while designing the PA and FSC, (iii) the parallelization of work across the organization on the basis of expertise, and (iv) the applicability of the method across all types of subsystems.
Architecting Safety Supervisors for High Levels of Automated Driving
Dec 05, 2019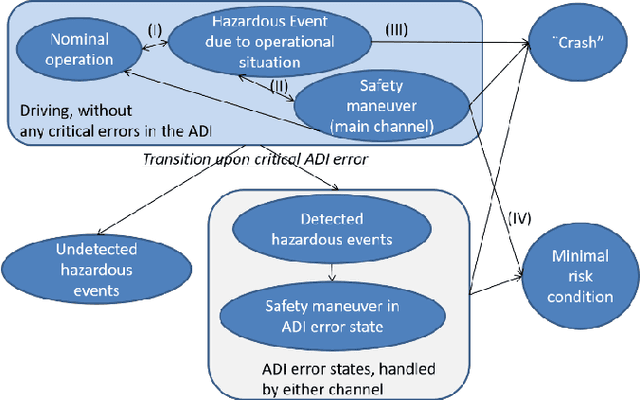
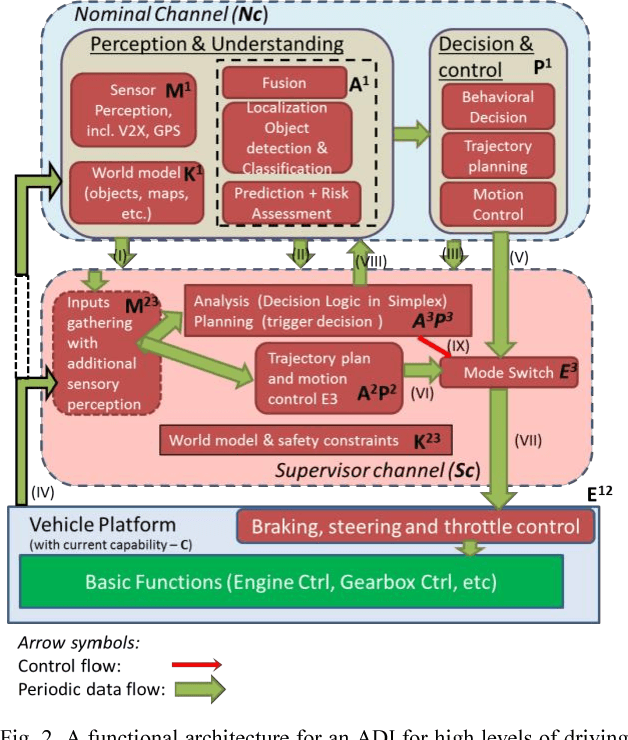
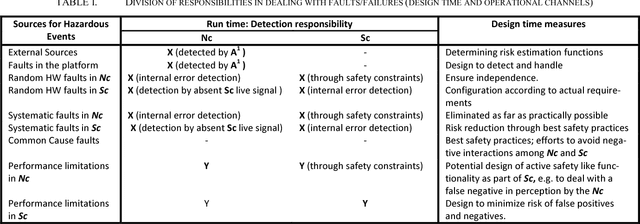
The complexity of automated driving poses challenges for providing safety assurance. Focusing on the architecting of an Autonomous Driving Intelligence (ADI), i.e. the computational intelligence, sensors and communication needed for high levels of automated driving, we investigate so called safety supervisors that complement the nominal functionality. We present a problem formulation and a functional architecture of a fault-tolerant ADI that encompasses a nominal and a safety supervisor channel. We then discuss the sources of hazardous events, the division of responsibilities among the channels, and when the supervisor should take over. We conclude with identified directions for further work.
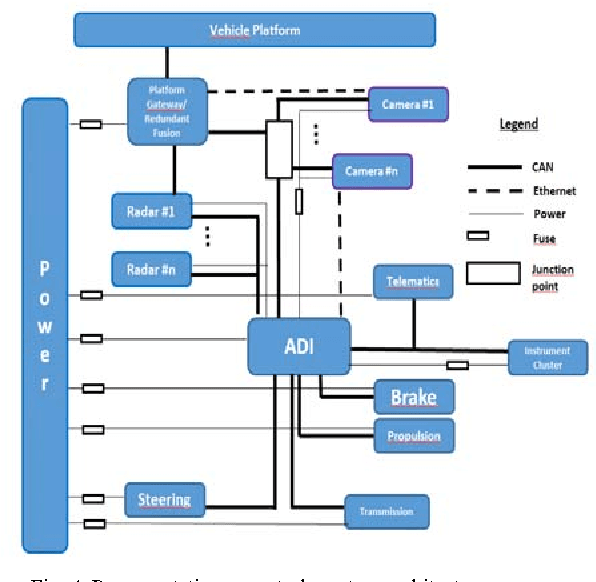
Challenges in Architecting Fully Automated Driving; with an Emphasis on Heavy Commercial Vehicles
Dec 04, 2019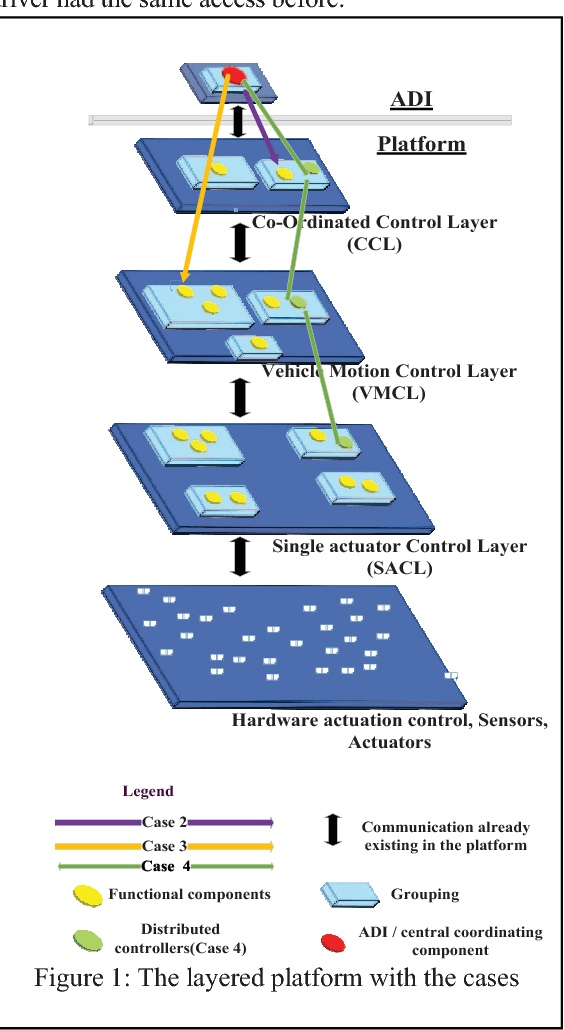
Fully automated vehicles will require new functionalities for perception, navigation and decision making -- an Autonomous Driving Intelligence (ADI). We consider architectural cases for such functionalities and investigate how they integrate with legacy platforms. The cases range from a robot replacing the driver -- with entire reuse of existing vehicle platforms, to a clean-slate design. Focusing on Heavy Commercial Vehicles (HCVs), we assess these cases from the perspectives of business, safety, dependability, verification, and realization. The original contributions of this paper are the classification of the architectural cases themselves and the analysis that follows. The analysis reveals that although full reuse of vehicle platforms is appealing, it will require explicitly dealing with the accidental complexity of the legacy platforms, including adding corresponding diagnostics and error handling to the ADI. The current fail-safe design of the platform will also tend to limit availability. Allowing changes to the platforms, will enable more optimized designs and fault-operational behaviour, but will require initial higher development cost and specific emphasis on partitioning and control to limit the influences of safety requirements. For all cases, the design and verification of the ADI will pose a grand challenge and relate to the evolution of the regulatory framework including safety standards.
ATRIUM -- Architecting Under Uncertainty for ISO 26262 compliance
Dec 04, 2019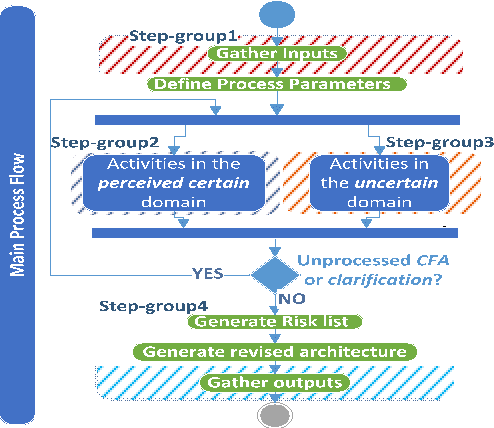
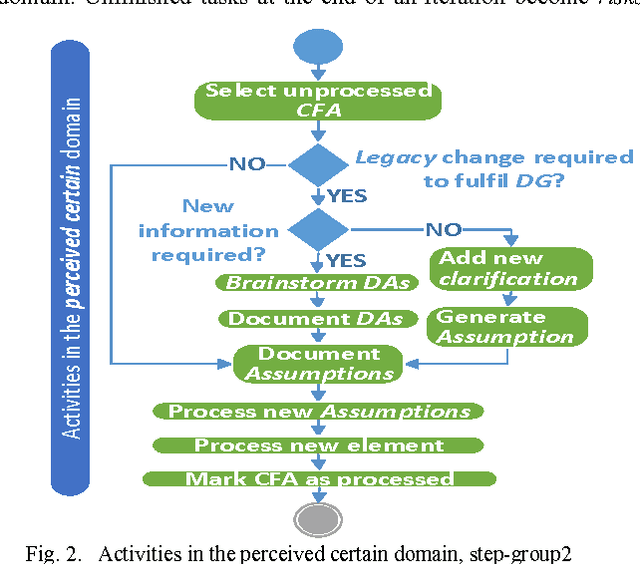
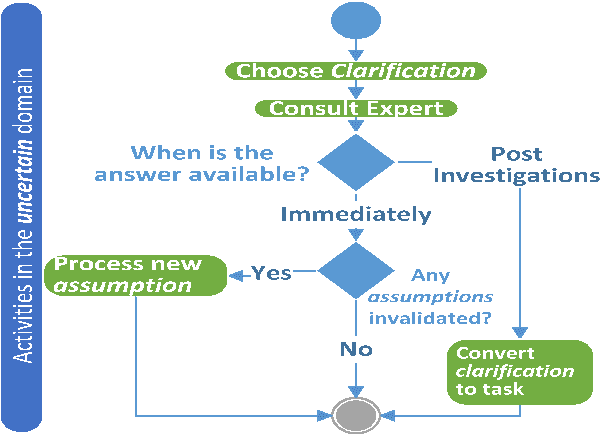
The ISO 26262 is currently the dominant standard for assuring functional safety of electrical and electronic systems in the automotive industry. The Functional Safety Concept (FSC) subphase in the standard requires the Preliminary Architectural Assumptions (PAA) for allocation of functional safety requirements (FSRs). This paper justifies the need for, and defines a process ATRIUM, for consistent design of the PAA. ATRIUM is subsequently applied in an industrial case study for a function enabling highly automated driving at one of the largest heavy vehicle manufacturers in Europe, Scania CV AB. The findings from this study, which contributed to ATRIUM's institutionalization at Scania, are presented. The benefits of the proposed process include (i) a fast and flexible way to refine the PAA, and a framework to (ii) incorporate information from legacy systems into safety design and (iii) rigorously track and document the assumptions and rationale behind architectural decisions under uncertain information. The contributions of this paper are the (i) analysis of the problem (ii) the process ATRIUM and (iii) findings and the discussion from the case study at Scania. Keywords: ISO 26262, functional safety, automation, HCV, HGV, architectures, highly automated driving, ATRIUM, decision making, architecting, uncertainty management