 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Spectral Fault Receptive Fields for Diagnosis-Informed Prognosis
Jun 14, 2025This paper introduces Spectral Fault Receptive Fields (SFRFs), a biologically inspired technique for degradation state assessment in bearing fault diagnosis and remaining useful life (RUL) estimation. Drawing on the center-surround organization of retinal ganglion cell receptive fields, we propose a frequency-domain feature extraction algorithm that enhances the detection of fault signatures in vibration signals. SFRFs are designed as antagonistic spectral filters centered on characteristic fault frequencies, with inhibitory surrounds that enable robust characterization of incipient faults under variable operating conditions. A multi-objective evolutionary optimization strategy based on NSGA-II algorithm is employed to tune the receptive field parameters by simultaneously minimizing RUL prediction error, maximizing feature monotonicity, and promoting smooth degradation trajectories. The method is demonstrated on the XJTU-SY bearing run-to-failure dataset, confirming its suitability for constructing condition indicators in health monitoring applications. Key contributions include: (i) the introduction of SFRFs, inspired by the biology of vision in the primate retina; (ii) an evolutionary optimization framework guided by condition monitoring and prognosis criteria; and (iii) experimental evidence supporting the detection of early-stage faults and their precursors. Furthermore, we confirm that our diagnosis-informed spectral representation achieves accurate RUL prediction using a bagging regressor. The results highlight the interpretability and principled design of SFRFs, bridging signal processing, biological sensing principles, and data-driven prognostics in rotating machinery.
Generalizable Temperature Nowcasting with Physics-Constrained RNNs for Predictive Maintenance of Wind Turbine Components
Apr 05, 2024Machine learning plays an important role in the operation of current wind energy production systems. One central application is predictive maintenance to increase efficiency and lower electricity costs by reducing downtimes. Integrating physics-based knowledge in neural networks to enforce their physical plausibilty is a promising method to improve current approaches, but incomplete system information often impedes their application in real world scenarios. We describe a simple and efficient way for physics-constrained deep learning-based predictive maintenance for wind turbine gearbox bearings with partial system knowledge. The approach is based on temperature nowcasting constrained by physics, where unknown system coefficients are treated as learnable neural network parameters. Results show improved generalization performance to unseen environments compared to a baseline neural network, which is especially important in low data scenarios often encountered in real-world applications.
Investigating Reproducibility in Deep Learning-Based Software Fault Prediction
Feb 08, 2024Over the past few years, deep learning methods have been applied for a wide range of Software Engineering (SE) tasks, including in particular for the important task of automatically predicting and localizing faults in software. With the rapid adoption of increasingly complex machine learning models, it however becomes more and more difficult for scholars to reproduce the results that are reported in the literature. This is in particular the case when the applied deep learning models and the evaluation methodology are not properly documented and when code and data are not shared. Given some recent -- and very worrying -- findings regarding reproducibility and progress in other areas of applied machine learning, the goal of this work is to analyze to what extent the field of software engineering, in particular in the area of software fault prediction, is plagued by similar problems. We have therefore conducted a systematic review of the current literature and examined the level of reproducibility of 56 research articles that were published between 2019 and 2022 in top-tier software engineering conferences. Our analysis revealed that scholars are apparently largely aware of the reproducibility problem, and about two thirds of the papers provide code for their proposed deep learning models. However, it turned out that in the vast majority of cases, crucial elements for reproducibility are missing, such as the code of the compared baselines, code for data pre-processing or code for hyperparameter tuning. In these cases, it therefore remains challenging to exactly reproduce the results in the current research literature. Overall, our meta-analysis therefore calls for improved research practices to ensure the reproducibility of machine-learning based research.
A Systematic Mapping Study of Digital Twins for Diagnosis in Transportation
Jan 22, 2024In recent years, digital twins have been proposed and implemented in various fields with potential applications ranging from prototyping to maintenance. Going forward, they are to enable numerous efficient and sustainable technologies, among them autonomous cars. However, despite a large body of research in many fields, academics have yet to agree on what exactly a digital twin is -- and as a result, what its capabilities and limitations might be. To further our understanding, we explore the capabilities of digital twins concerning diagnosis in the field of transportation. We conduct a systematic mapping study including digital twins of vehicles and their components, as well as transportation infrastructure. We discovered that few papers on digital twins describe any diagnostic process. Furthermore, most existing approaches appear limited to system monitoring or fault detection. These findings suggest that we need more research for diagnostic reasoning utilizing digital twins.
Finding Critical Scenarios for Automated Driving Systems: A Systematic Literature Review
Oct 16, 2021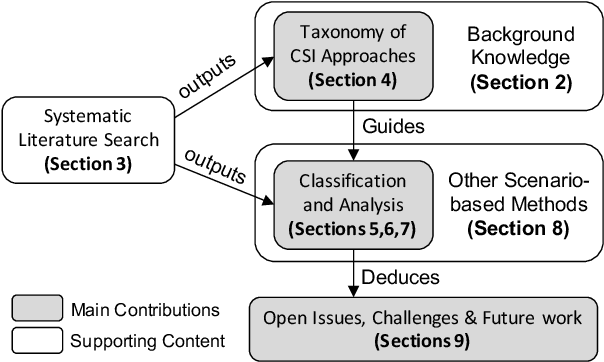
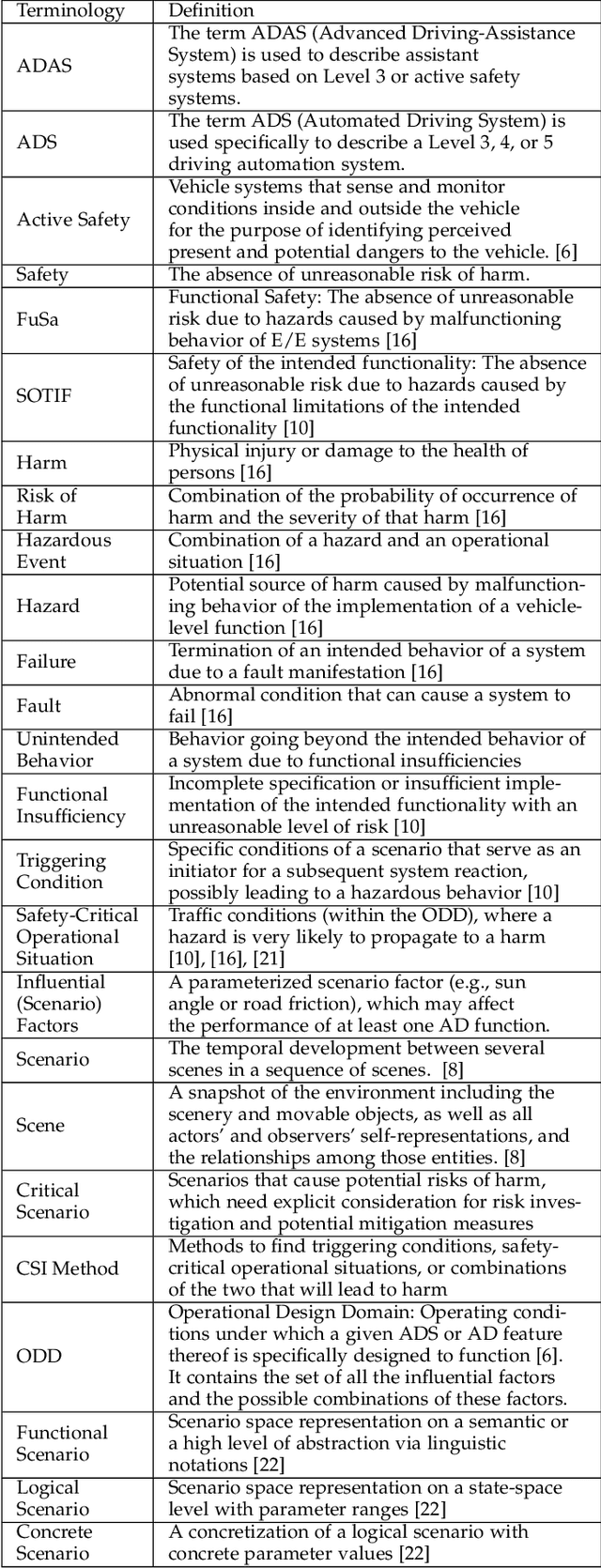
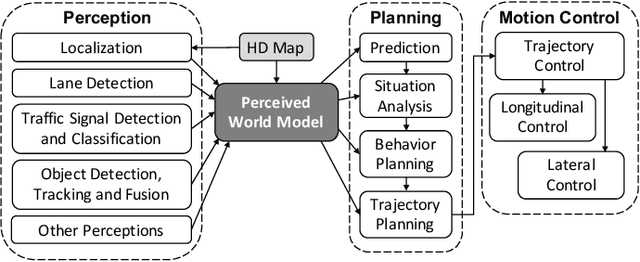
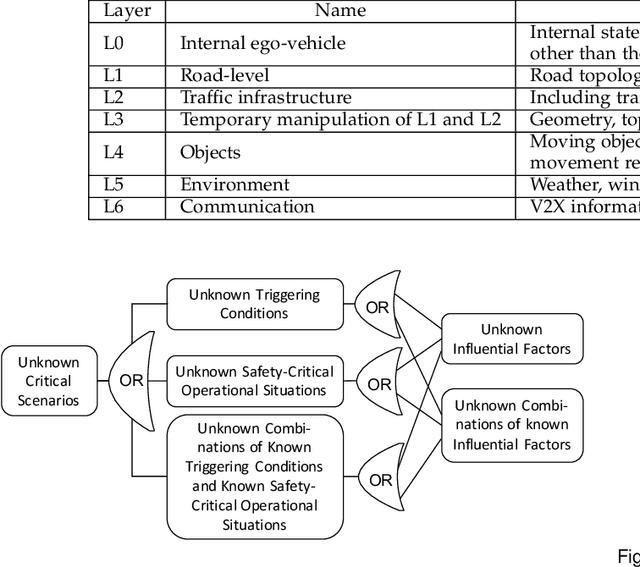
Scenario-based approaches have been receiving a huge amount of attention in research and engineering of automated driving systems. Due to the complexity and uncertainty of the driving environment, and the complexity of the driving task itself, the number of possible driving scenarios that an ADS or ADAS may encounter is virtually infinite. Therefore it is essential to be able to reason about the identification of scenarios and in particular critical ones that may impose unacceptable risk if not considered. Critical scenarios are particularly important to support design, verification and validation efforts, and as a basis for a safety case. In this paper, we present the results of a systematic literature review in the context of autonomous driving. The main contributions are: (i) introducing a comprehensive taxonomy for critical scenario identification methods; (ii) giving an overview of the state-of-the-art research based on the taxonomy encompassing 86 papers between 2017 and 2020; and (iii) identifying open issues and directions for further research. The provided taxonomy comprises three main perspectives encompassing the problem definition (the why), the solution (the methods to derive scenarios), and the assessment of the established scenarios. In addition, we discuss open research issues considering the perspectives of coverage, practicability, and scenario space explosion.
A framework for the automation of testing computer vision systems
May 10, 2021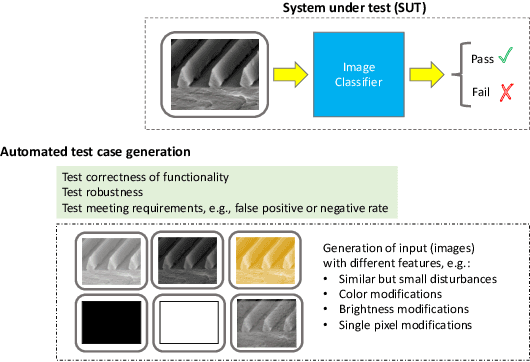

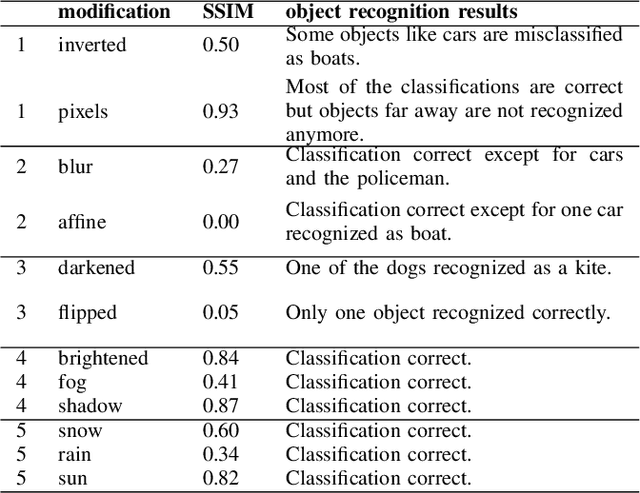
Vision systems, i.e., systems that allow to detect and track objects in images, have gained substantial importance over the past decades. They are used in quality assurance applications, e.g., for finding surface defects in products during manufacturing, surveillance, but also automated driving, requiring reliable behavior. Interestingly, there is only little work on quality assurance and especially testing of vision systems in general. In this paper, we contribute to the area of testing vision software, and present a framework for the automated generation of tests for systems based on vision and image recognition. The framework makes use of existing libraries allowing to modify original images and to obtain similarities between the original and modified images. We show how such a framework can be used for testing a particular industrial application on identifying defects on riblet surfaces and present preliminary results from the image classification domain.
Automatic Generation of Challenging Road Networks for ALKS Testing based on Bezier Curves and Search
Mar 01, 2021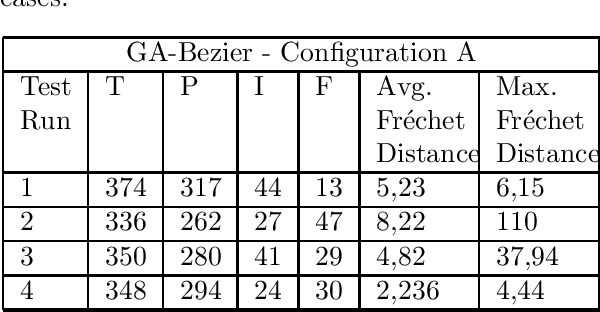
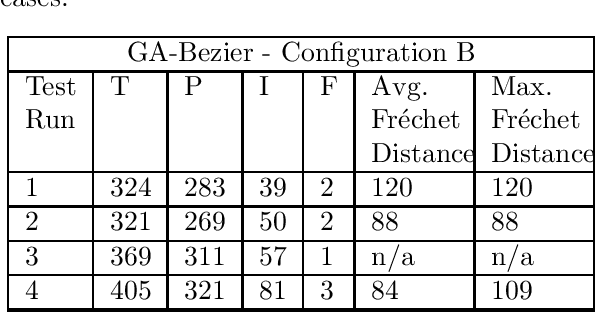
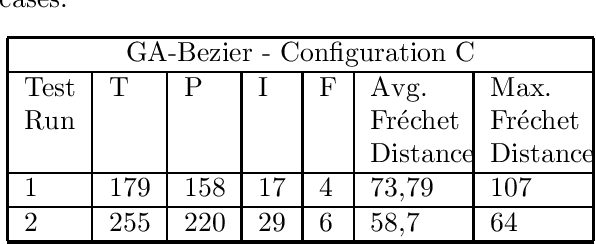
In this paper, we outline an approach for automatic generation of challenging road networks for virtual testing of an automated lane keep system. Based on a set of control points, we construct a parametric curve that represents a road network, which defines the dynamic driving task an automated lane keep system equipped vehicle has to perform. Changing control points has global influence on the resulting road geometry. Our approach uses search to find a set of control points that results in a challenging road geometry, eventually forcing the vehicle to leave the intended path. We evaluated our approach in three different search-configurations regarding test efficiency and practical applicability for automatic virtual testing of an automated lane keep system.
Modeling State in Software Debugging of VHDL-RTL Designs -- A Model-Based Diagnosis Approach
Nov 03, 2003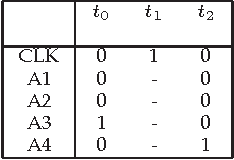
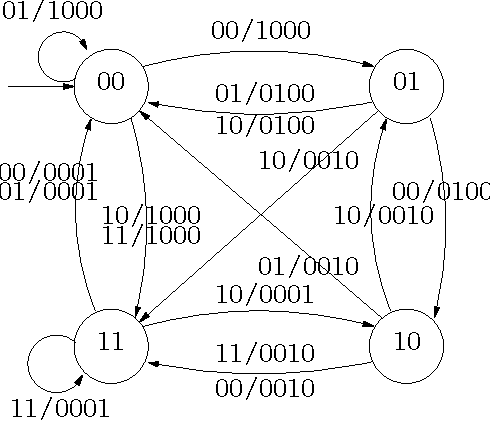

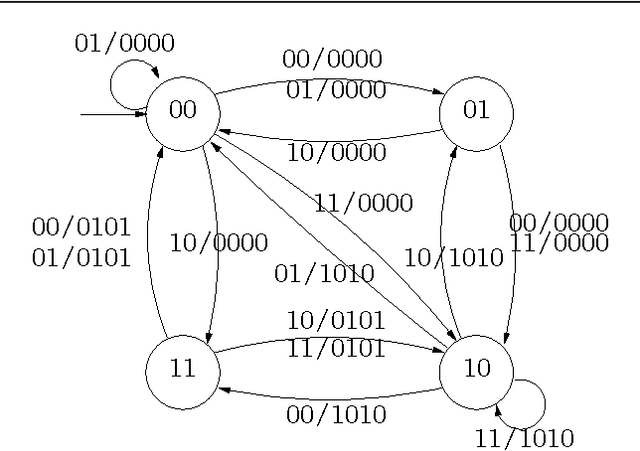
In this paper we outline an approach of applying model-based diagnosis to the field of automatic software debugging of hardware designs. We present our value-level model for debugging VHDL-RTL designs and show how to localize the erroneous component responsible for an observed misbehavior. Furthermore, we discuss an extension of our model that supports the debugging of sequential circuits, not only at a given point in time, but also allows for considering the temporal behavior of VHDL-RTL designs. The introduced model is capable of handling state inherently present in every sequential circuit. The principal applicability of the new model is outlined briefly and we use industrial-sized real world examples from the ISCAS'85 benchmark suite to discuss the scalability of our approach.