 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Generation of Challenging Road Networks for ALKS Testing based on Bezier Curves and Search
Paper and Code
Mar 01, 2021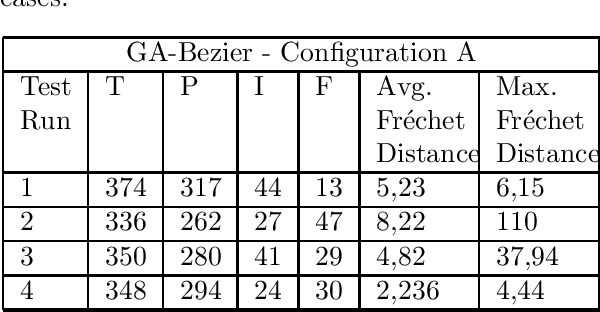
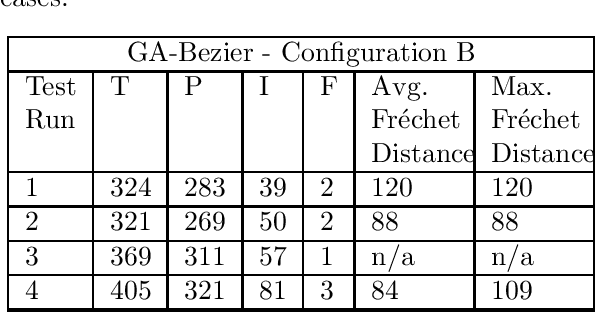
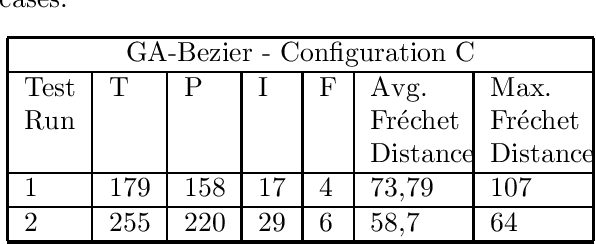
In this paper, we outline an approach for automatic generation of challenging road networks for virtual testing of an automated lane keep system. Based on a set of control points, we construct a parametric curve that represents a road network, which defines the dynamic driving task an automated lane keep system equipped vehicle has to perform. Changing control points has global influence on the resulting road geometry. Our approach uses search to find a set of control points that results in a challenging road geometry, eventually forcing the vehicle to leave the intended path. We evaluated our approach in three different search-configurations regarding test efficiency and practical applicability for automatic virtual testing of an automated lane keep system.