 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA framework for the automation of testing computer vision systems
May 10, 2021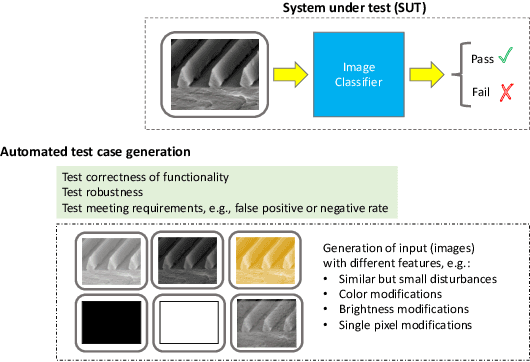

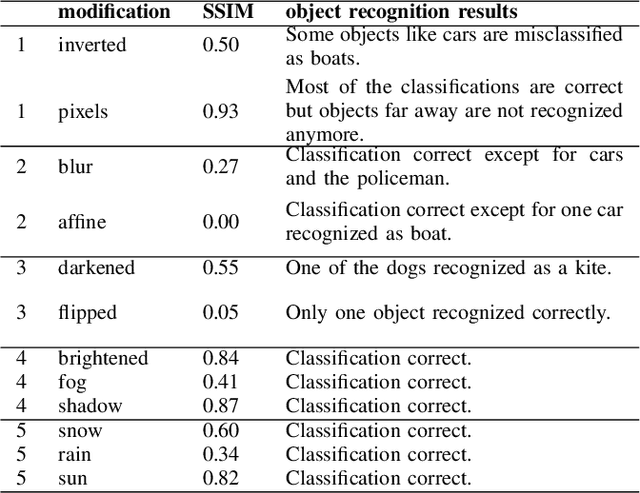
Vision systems, i.e., systems that allow to detect and track objects in images, have gained substantial importance over the past decades. They are used in quality assurance applications, e.g., for finding surface defects in products during manufacturing, surveillance, but also automated driving, requiring reliable behavior. Interestingly, there is only little work on quality assurance and especially testing of vision systems in general. In this paper, we contribute to the area of testing vision software, and present a framework for the automated generation of tests for systems based on vision and image recognition. The framework makes use of existing libraries allowing to modify original images and to obtain similarities between the original and modified images. We show how such a framework can be used for testing a particular industrial application on identifying defects on riblet surfaces and present preliminary results from the image classification domain.
Automatic Generation of Challenging Road Networks for ALKS Testing based on Bezier Curves and Search
Mar 01, 2021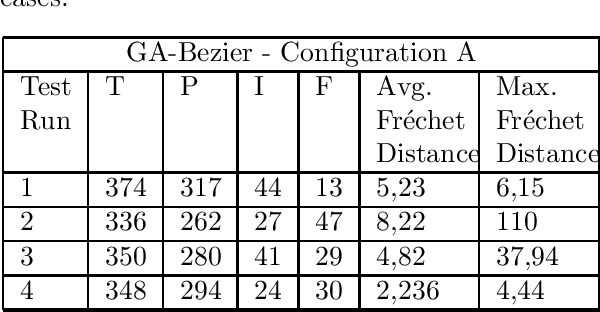
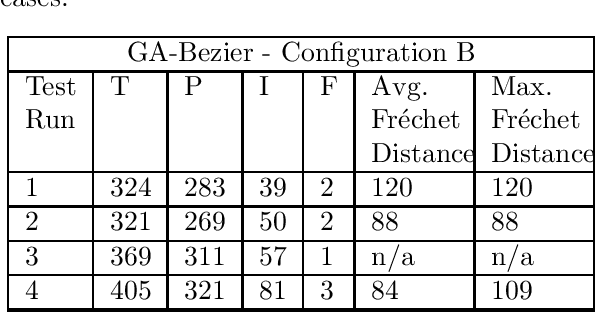
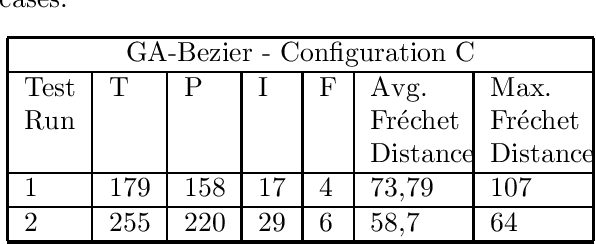
In this paper, we outline an approach for automatic generation of challenging road networks for virtual testing of an automated lane keep system. Based on a set of control points, we construct a parametric curve that represents a road network, which defines the dynamic driving task an automated lane keep system equipped vehicle has to perform. Changing control points has global influence on the resulting road geometry. Our approach uses search to find a set of control points that results in a challenging road geometry, eventually forcing the vehicle to leave the intended path. We evaluated our approach in three different search-configurations regarding test efficiency and practical applicability for automatic virtual testing of an automated lane keep system.