 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusion of Heterogeneous Friction Estimates for Traction Adaptive Motion Planning and Control
May 14, 2021

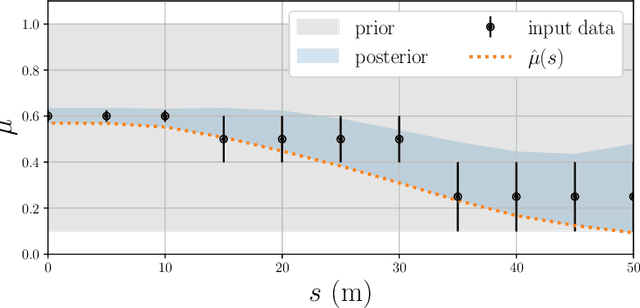

Traction adaptive motion planning and control has potential to improve an an automated vehicle's ability to avoid accident in a critical situation. However, such functionality require an accurate friction estimate for the road ahead of the vehicle that is updated in real time. Current state of the art friction estimation techniques include high accuracy local friction estimation in the presence of tire slip, as well as rough classification of the road surface ahead of the vehicle, based on forward looking camera. In this paper we show that neither of these techniques in isolation yield satisfactory behavior when deployed with traction adaptive motion planning and control functionality. However, fusion of the two provides sufficient accuracy, availability and foresight to yield near optimal behavior. To this end, we propose a fusion method based on heteroscedastic gaussian process regression, and present initial simulation based results.
Traction Adaptive Motion Planning at the Limits of Handling
Sep 09, 2020



In this paper we address the problem of motion planning and control at the limits of handling, under locally varying traction conditions. We propose a novel solution method where locally varying traction is represented by time-varying tire force constraints. A constrained finite time optimal control problem is solved in a receding horizon fashion, imposing these time-varying constraints. Furthermore, we employ a sampling augmentation procedure to address the problems of infeasibility and sensitivity to local minima that arises when the constraint configuration is altered. We validate the proposed algorithm on a Volvo FH16 heavy-duty vehicle, in a range of critical scenarios. Experimental results indicate that traction adaptation improves the vehicle's capacity to avoid accidents, both when adapting to low and high local traction.
Architecting Safety Supervisors for High Levels of Automated Driving
Dec 05, 2019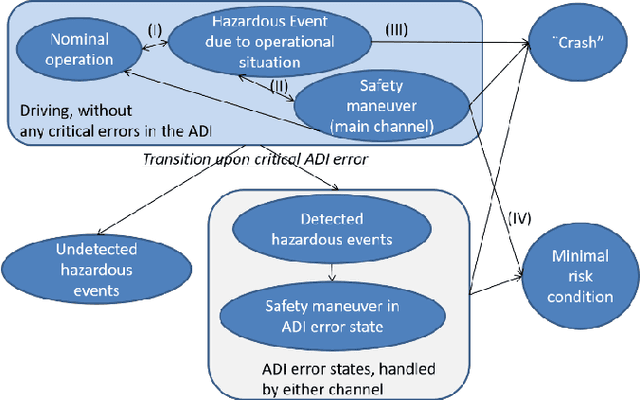
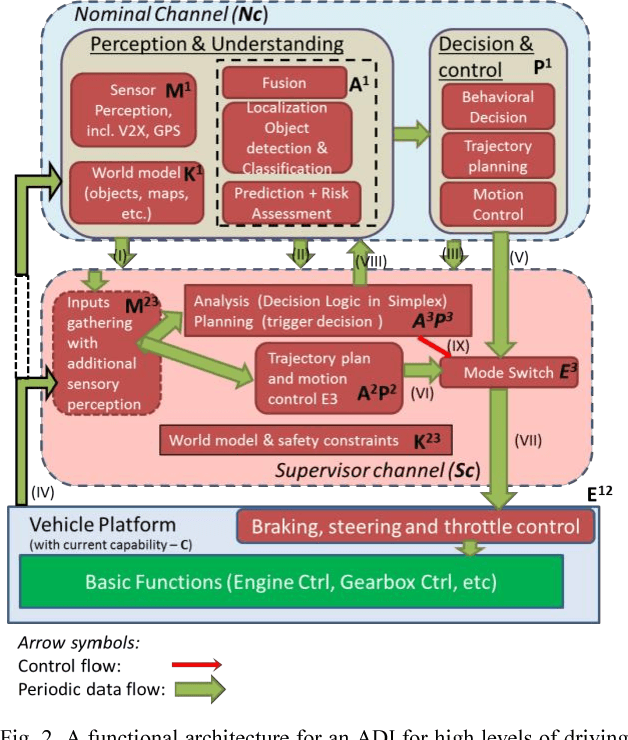
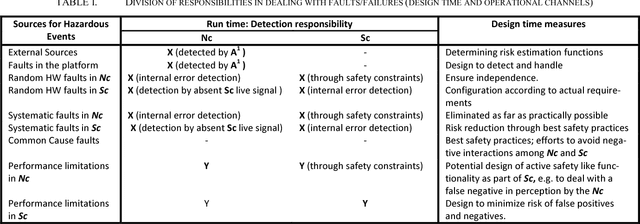
The complexity of automated driving poses challenges for providing safety assurance. Focusing on the architecting of an Autonomous Driving Intelligence (ADI), i.e. the computational intelligence, sensors and communication needed for high levels of automated driving, we investigate so called safety supervisors that complement the nominal functionality. We present a problem formulation and a functional architecture of a fault-tolerant ADI that encompasses a nominal and a safety supervisor channel. We then discuss the sources of hazardous events, the division of responsibilities among the channels, and when the supervisor should take over. We conclude with identified directions for further work.
Adaptive Trajectory Planning and Optimization at Limits of Handling
Mar 11, 2019



As deployment of automated vehicles increases, so does the rate at which they are exposed to critical traffic situations. Such situations, e.g. a late detected pedestrian in the vehicle path, require operation at the handling limits in order to maximize the capacity to avoid an accident. Also, the physical limitations of the vehicle typically vary in time due to local road and weather conditions. In this paper, we tackle the problem of trajectory planning and control at the limits of handling under time varying constraints, by adapting to local traction limitations. The proposed method is based on Real Time Iteration Sequential Quadratic Programming (RTI-SQP) augmented with state space sampling, which we call Sampling Augmented Adaptive RTI-SQP (SAA-SQP). Through extensive numerical simulations we demonstrate that our method increases the vehicle's capacity to avoid late detected obstacles compared to the traditional planning/tracking approaches, as a direct consequence of safe operating constraint adaptation in real time.
ASIC Implementation of Time-Domain Digital Backpropagation with Deep-Learned Chromatic Dispersion Filters
Jun 20, 2018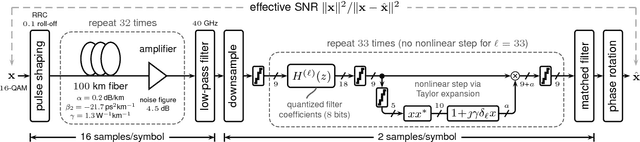
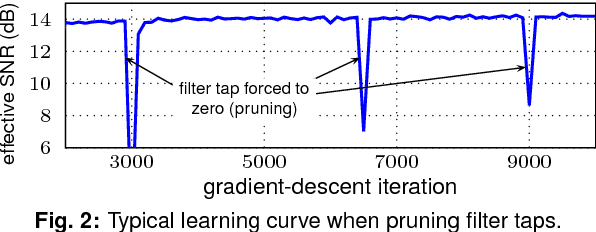
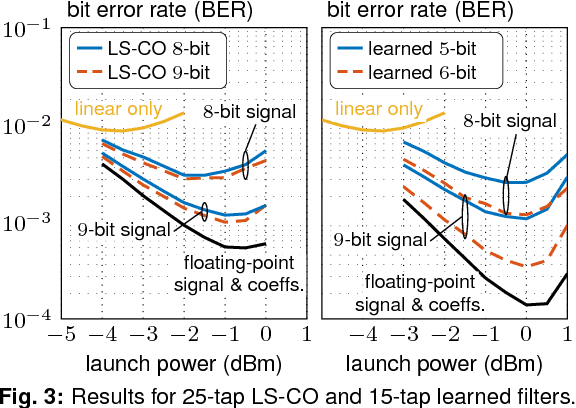
We consider time-domain digital backpropagation with chromatic dispersion filters jointly optimized and quantized using machine-learning techniques. Compared to the baseline implementations, we show improved BER performance and >40% power dissipation reductions in 28-nm CMOS.