 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges in Architecting Fully Automated Driving; with an Emphasis on Heavy Commercial Vehicles
Dec 04, 2019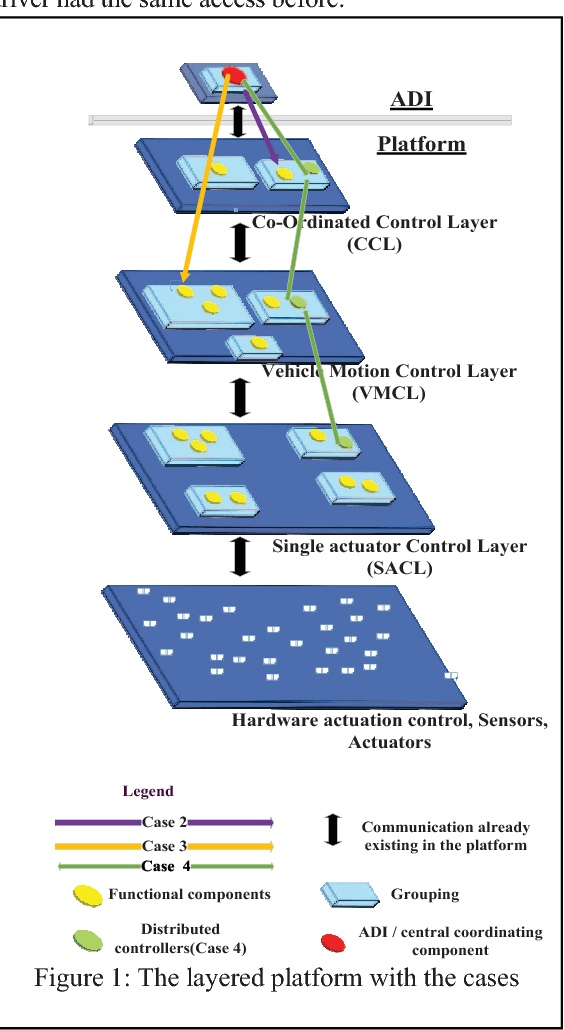
Fully automated vehicles will require new functionalities for perception, navigation and decision making -- an Autonomous Driving Intelligence (ADI). We consider architectural cases for such functionalities and investigate how they integrate with legacy platforms. The cases range from a robot replacing the driver -- with entire reuse of existing vehicle platforms, to a clean-slate design. Focusing on Heavy Commercial Vehicles (HCVs), we assess these cases from the perspectives of business, safety, dependability, verification, and realization. The original contributions of this paper are the classification of the architectural cases themselves and the analysis that follows. The analysis reveals that although full reuse of vehicle platforms is appealing, it will require explicitly dealing with the accidental complexity of the legacy platforms, including adding corresponding diagnostics and error handling to the ADI. The current fail-safe design of the platform will also tend to limit availability. Allowing changes to the platforms, will enable more optimized designs and fault-operational behaviour, but will require initial higher development cost and specific emphasis on partitioning and control to limit the influences of safety requirements. For all cases, the design and verification of the ADI will pose a grand challenge and relate to the evolution of the regulatory framework including safety standards.