 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTACO: Towards Task-Consistent Open-Vocabulary Adaptation in Video Recognition
Jun 24, 2026Adapting CLIP for open-vocabulary video recognition necessitates a delicate balance between newly acquired video knowledge and the pretrained generalization. While existing studies pursue this generalization-specialization trade-off with additional regularizations or constraints, we argue that they overlook the deviation of representations beyond the fine-tuning data distribution, resulting in suboptimal adaptation effects. We believe such deviation is inherited from the inconsistency between the fine-tuning and evaluation objectives, where model optimization is restricted to the known training distribution but evaluated on unseen ones. In this paper, we introduce \emph{TACO}, a simple yet effective framework to mitigate the potential negative effects induced by this inconsistency. Our key insight is that adaptation should preserve OOD-relevant alignment beyond the training distribution. To this end, we propose \emph{Relative Structure Distillation}, which regularizes the relative geometry of the representation space and suppresses harmful alignment shift during training. We further decouple the representation space from the optimization space with a lightweight specialization projection, allowing task-specific adaptation without directly overspecializing the representations used at test time. \emph{TACO} establishes state-of-the-art performance on diverse benchmarks under cross-dataset and base-to-novel settings. Code will be released at https://github.com/ZMHH-H/TACO.
KinematicRL: A Sim-to-Real Reinforcement Learning Framework For Social Navigation With Kinodynamic Feasibility
Jun 10, 2026Deep Reinforcement Learning (DRL) has shown promise for social navigation, yet its real-world deployment remains hindered by a persistent sim-to-real gap arising from simplified first-order dynamics and context-specific human state estimation pipelines. This work presents a unified framework that addresses these limitations to produce dynamically feasible navigation policies suitable for real-world deployment. First, theoretical analysis reveals that tracking error between simulated and actual robot position decays exponentially with increased control order, motivating the use of higher-order control inputs as DRL action space. A second-order control formulation tailored to differential drive robots is developed, complemented by a stochastic iterative Linear Quadratic Regulator (iLQR) that pretrains the policy via a divergence minimization objective. Second, to avoid the added system complexity of camera-LiDAR fusion, a cluster-based human tracking pipeline using only 2D LiDAR is introduced. Human detections are associated according to both spatial proximity and velocity similarity, enabling reliable differentiation of nearby pedestrians and yielding stable velocity estimates through temporal aggregation. Third, we introduce an unbiased residual gating block to balance reaction- and memory-based behaviors while handling time-varying crowd sizes, both critical for social navigation. The resulting policy, KinematicRL, consistently improves kinematic performance and adapts to varying number of detected humans. Experiments in real-world environments demonstrate that, when combined with the proposed tracking pipeline, KinematicRL can be deployed on a real differential drive robot with minimal modifications.
Dynamics Are Learned, Not Told: Semi-Supervised Discovery of Latent Dynamics Geometries For Zero-Shot Policy Adaptation
Jun 01, 2026Real-world dynamics shifts pose a critical challenge for reinforcement learning in robotics, as policies tightly coupled to nominal environments often fail catastrophically when physical conditions change. Most existing methods rely on encoding explicitly identified physical parameters into a latent context, a parameter-centric paradigm that depends on pre-specified axes of variation and becomes brittle under unmodeled or compound dynamics changes. We revisit dynamics adaptation from an outcome-centric perspective: rather than telling policies what the dynamics are, we enable them to learn how dynamics affect interaction outcomes. Theoretically, this is grounded in a monotonic relationship between target-domain regret and the Lipschitz constant of a trajectory dynamics encoder. Practically, this constant can be upper-bounded through contrastive learning, yielding a smooth, task-relevant latent topology without privileged dynamics information. On MuJoCo benchmarks, our method consistently outperforms parameter-centric baselines under severe dynamics shifts, including unmodeled and time-varying parameters, while also improving in-distribution stability and latent interpretability. Overall, these results validate that controlling latent geometry is a principled mechanism for robust adaptation.
P2DNav: Panorama-to-Downview Reasoning for Zero-shot Vision-and-Language Navigation
May 19, 2026Vision-and-language navigation (VLN) requires an embodied agent to ground natural-language instructions into executable navigation actions in unseen environments. Existing zero-shot methods typically rely on additional waypoint prediction modules, which often entangle high-level directional reasoning with fine-grained local grounding, leading to error-prone and unstable decisions. In this paper, we propose P2DNav, a hierarchical framework for zero-shot vision-and-language navigation. P2DNav consists of three core components: Panorama-to-Downview (P2D), Sliding-Window Dialogue Memory (SDM), and Reflective Reorientation Mechanism (RRM). P2D explicitly decomposes navigation decision-making into two stages: panoramic direction selection and downview local grounding. It first selects the instruction-relevant direction from a 360° panorama, and then predicts a pixel-level target point from the downview RGB observation in that direction. In addition, SDM organizes navigation history as a multi-turn dialogue context and maintains recent visual observations within a sliding window to support long-horizon navigation. RRM further enables reflective reorientation by assessing the reliability of local grounding based on the downview observation and returning to panoramic direction selection when necessary. Experiments on the R2R-CE benchmark show that P2DNav achieves strong performance among zero-shot methods. In particular, compared with the state-of-the-art (SOTA) zero-shot waypoint-based and waypoint-free methods, P2DNav achieves SR gains of 146.6% and 58.9%, respectively, demonstrating the effectiveness of P2D, SDM, and RRM for zero-shot VLN. Code will be released for public use.
Deconfounded Lifelong Learning for Autonomous Driving via Dynamic Knowledge Spaces
Mar 15, 2026End-to-End autonomous driving (E2E-AD) systems face challenges in lifelong learning, including catastrophic forgetting, difficulty in knowledge transfer across diverse scenarios, and spurious correlations between unobservable confounders and true driving intents. To address these issues, we propose DeLL, a Deconfounded Lifelong Learning framework that integrates a Dirichlet process mixture model (DPMM) with the front-door adjustment mechanism from causal inference. The DPMM is employed to construct two dynamic knowledge spaces: a trajectory knowledge space for clustering explicit driving behaviors and an implicit feature knowledge space for discovering latent driving abilities. Leveraging the non-parametric Bayesian nature of DPMM, our framework enables adaptive expansion and incremental updating of knowledge without predefining the number of clusters, thereby mitigating catastrophic forgetting. Meanwhile, the front-door adjustment mechanism utilizes the DPMM-derived knowledge as valid mediators to deconfound spurious correlations, such as those induced by sensor noise or environmental changes, and enhances the causal expressiveness of the learned representations. Additionally, we introduce an evolutionary trajectory decoder that enables non-autoregressive planning. To evaluate the lifelong learning performance of E2E-AD, we propose new evaluation protocols and metrics based on Bench2Drive. Extensive evaluations in the closed-loop CARLA simulator demonstrate that our framework significantly improves adaptability to new driving scenarios and overall driving performance, while effectively retaining previous acquired knowledge.
Bootstrapping MLLM for Weakly-Supervised Class-Agnostic Object Counting
Feb 13, 2026Object counting is a fundamental task in computer vision, with broad applicability in many real-world scenarios. Fully-supervised counting methods require costly point-level annotations per object. Few weakly-supervised methods leverage only image-level object counts as supervision and achieve fairly promising results. They are, however, often limited to counting a single category, e.g. person. In this paper, we propose WS-COC, the first MLLM-driven weakly-supervised framework for class-agnostic object counting. Instead of directly fine-tuning MLLMs to predict object counts, which can be challenging due to the modality gap, we incorporate three simple yet effective strategies to bootstrap the counting paradigm in both training and testing: First, a divide-and-discern dialogue tuning strategy is proposed to guide the MLLM to determine whether the object count falls within a specific range and progressively break down the range through multi-round dialogue. Second, a compare-and-rank count optimization strategy is introduced to train the MLLM to optimize the relative ranking of multiple images according to their object counts. Third, a global-and-local counting enhancement strategy aggregates and fuses local and global count predictions to improve counting performance in dense scenes. Extensive experiments on FSC-147, CARPK, PUCPR+, and ShanghaiTech show that WS-COC matches or even surpasses many state-of-art fully-supervised methods while significantly reducing annotation costs. Code is available at https://github.com/viscom-tongji/WS-COC.
DST-Calib: A Dual-Path, Self-Supervised, Target-Free LiDAR-Camera Extrinsic Calibration Network
Jan 03, 2026LiDAR-camera extrinsic calibration is essential for multi-modal data fusion in robotic perception systems. However, existing approaches typically rely on handcrafted calibration targets (e.g., checkerboards) or specific, static scene types, limiting their adaptability and deployment in real-world autonomous and robotic applications. This article presents the first self-supervised LiDAR-camera extrinsic calibration network that operates in an online fashion and eliminates the need for specific calibration targets. We first identify a significant generalization degradation problem in prior methods, caused by the conventional single-sided data augmentation strategy. To overcome this limitation, we propose a novel double-sided data augmentation technique that generates multi-perspective camera views using estimated depth maps, thereby enhancing robustness and diversity during training. Built upon this augmentation strategy, we design a dual-path, self-supervised calibration framework that reduces the dependence on high-precision ground truth labels and supports fully adaptive online calibration. Furthermore, to improve cross-modal feature association, we replace the traditional dual-branch feature extraction design with a difference map construction process that explicitly correlates LiDAR and camera features. This not only enhances calibration accuracy but also reduces model complexity. Extensive experiments conducted on five public benchmark datasets, as well as our own recorded dataset, demonstrate that the proposed method significantly outperforms existing approaches in terms of generalizability.
CLASH: Collaborative Large-Small Hierarchical Framework for Continuous Vision-and-Language Navigation
Dec 11, 2025Vision-and-Language Navigation (VLN) requires robots to follow natural language instructions and navigate complex environments without prior maps. While recent vision-language large models demonstrate strong reasoning abilities, they often underperform task-specific panoramic small models in VLN tasks. To address this, we propose CLASH (Collaborative Large-Small Hierarchy), a VLN-CE framework that integrates a reactive small-model planner (RSMP) with a reflective large-model reasoner (RLMR). RSMP adopts a causal-learning-based dual-branch architecture to enhance generalization, while RLMR leverages panoramic visual prompting with chain-of-thought reasoning to support interpretable spatial understanding and navigation. We further introduce an uncertainty-aware collaboration mechanism (UCM) that adaptively fuses decisions from both models. For obstacle avoidance, in simulation, we replace the rule-based controller with a fully learnable point-goal policy, and in real-world deployment, we design a LiDAR-based clustering module for generating navigable waypoints and pair it with an online SLAM-based local controller. CLASH achieves state-of-the-art (SoTA) results (ranking 1-st) on the VLN-CE leaderboard, significantly improving SR and SPL on the test-unseen set over the previous SoTA methods. Real-world experiments demonstrate CLASH's strong robustness, validating its effectiveness in both simulation and deployment scenarios.
Rethinking the Embodied Gap in Vision-and-Language Navigation: A Holistic Study of Physical and Visual Disparities
Jul 17, 2025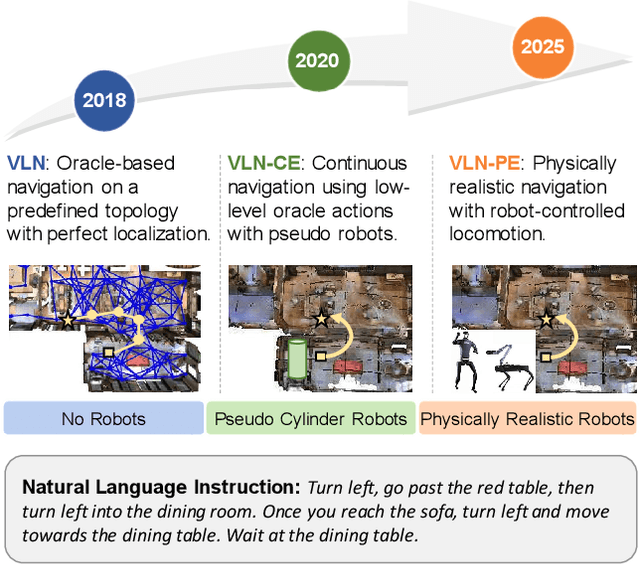

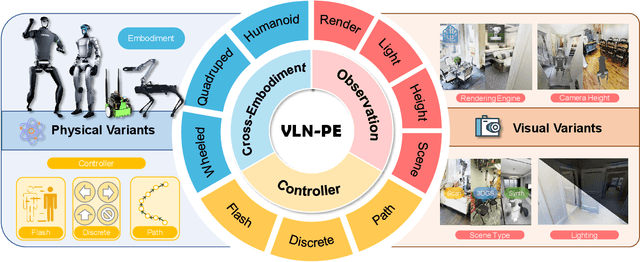

Recent Vision-and-Language Navigation (VLN) advancements are promising, but their idealized assumptions about robot movement and control fail to reflect physically embodied deployment challenges. To bridge this gap, we introduce VLN-PE, a physically realistic VLN platform supporting humanoid, quadruped, and wheeled robots. For the first time, we systematically evaluate several ego-centric VLN methods in physical robotic settings across different technical pipelines, including classification models for single-step discrete action prediction, a diffusion model for dense waypoint prediction, and a train-free, map-based large language model (LLM) integrated with path planning. Our results reveal significant performance degradation due to limited robot observation space, environmental lighting variations, and physical challenges like collisions and falls. This also exposes locomotion constraints for legged robots in complex environments. VLN-PE is highly extensible, allowing seamless integration of new scenes beyond MP3D, thereby enabling more comprehensive VLN evaluation. Despite the weak generalization of current models in physical deployment, VLN-PE provides a new pathway for improving cross-embodiment's overall adaptability. We hope our findings and tools inspire the community to rethink VLN limitations and advance robust, practical VLN models. The code is available at https://crystalsixone.github.io/vln_pe.github.io/.
Realizing Text-Driven Motion Generation on NAO Robot: A Reinforcement Learning-Optimized Control Pipeline
Jun 05, 2025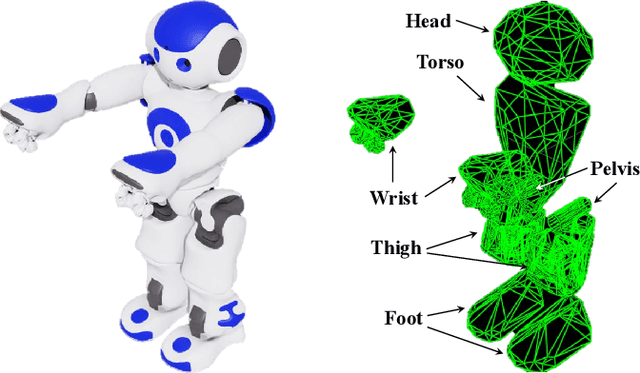
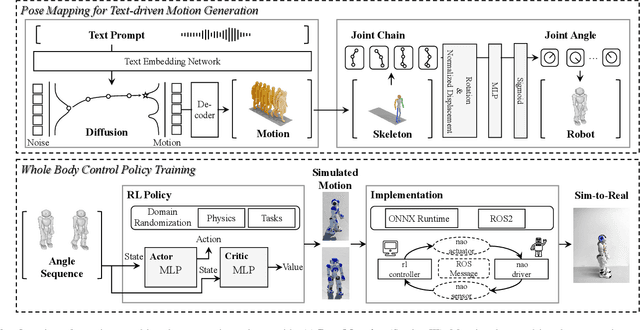
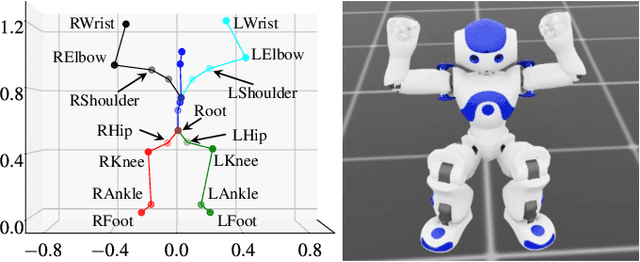
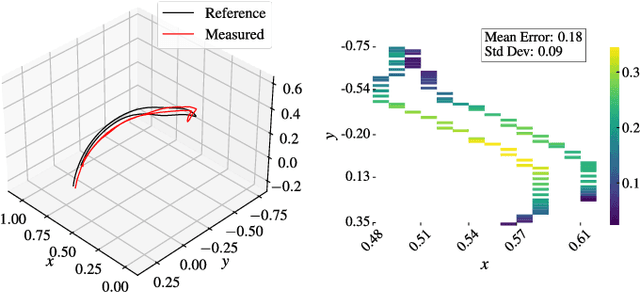
Human motion retargeting for humanoid robots, transferring human motion data to robots for imitation, presents significant challenges but offers considerable potential for real-world applications. Traditionally, this process relies on human demonstrations captured through pose estimation or motion capture systems. In this paper, we explore a text-driven approach to mapping human motion to humanoids. To address the inherent discrepancies between the generated motion representations and the kinematic constraints of humanoid robots, we propose an angle signal network based on norm-position and rotation loss (NPR Loss). It generates joint angles, which serve as inputs to a reinforcement learning-based whole-body joint motion control policy. The policy ensures tracking of the generated motions while maintaining the robot's stability during execution. Our experimental results demonstrate the efficacy of this approach, successfully transferring text-driven human motion to a real humanoid robot NAO.