 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Exploiting Vision Foundation Model's Profound Prior Knowledge for Generalizable RGB-Depth Driving Scene Parsing
Feb 10, 2025



Recent vision foundation models (VFMs), typically based on Vision Transformer (ViT), have significantly advanced numerous computer vision tasks. Despite their success in tasks focused solely on RGB images, the potential of VFMs in RGB-depth driving scene parsing remains largely under-explored. In this article, we take one step toward this emerging research area by investigating a feasible technique to fully exploit VFMs for generalizable RGB-depth driving scene parsing. Specifically, we explore the inherent characteristics of RGB and depth data, thereby presenting a Heterogeneous Feature Integration Transformer (HFIT). This network enables the efficient extraction and integration of comprehensive heterogeneous features without re-training ViTs. Relative depth prediction results from VFMs, used as inputs to the HFIT side adapter, overcome the limitations of the dependence on depth maps. Our proposed HFIT demonstrates superior performance compared to all other traditional single-modal and data-fusion scene parsing networks, pre-trained VFMs, and ViT adapters on the Cityscapes and KITTI Semantics datasets. We believe this novel strategy paves the way for future innovations in VFM-based data-fusion techniques for driving scene parsing. Our source code is publicly available at https://mias.group/HFIT.
LIX: Implicitly Infusing Spatial Geometric Prior Knowledge into Visual Semantic Segmentation for Autonomous Driving
Mar 13, 2024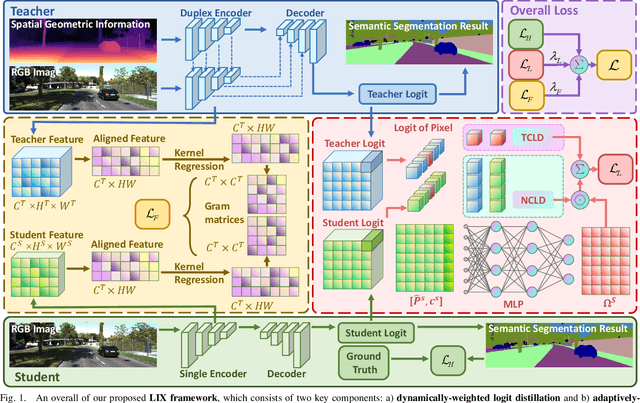
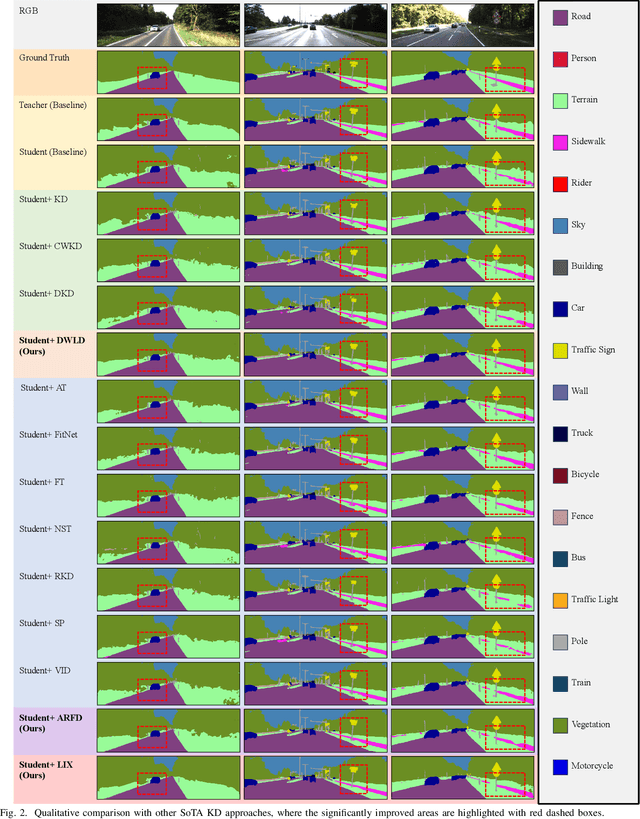
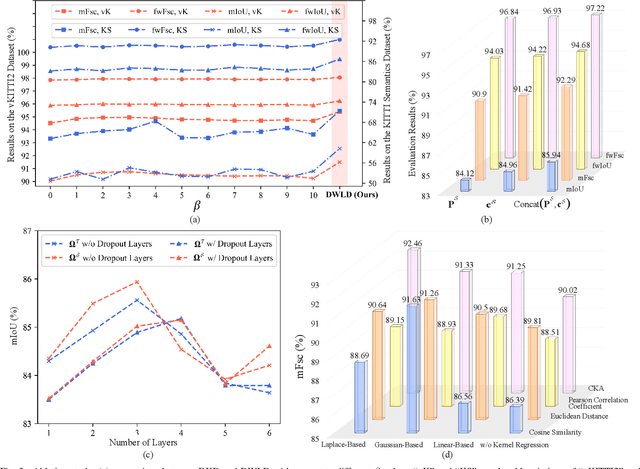
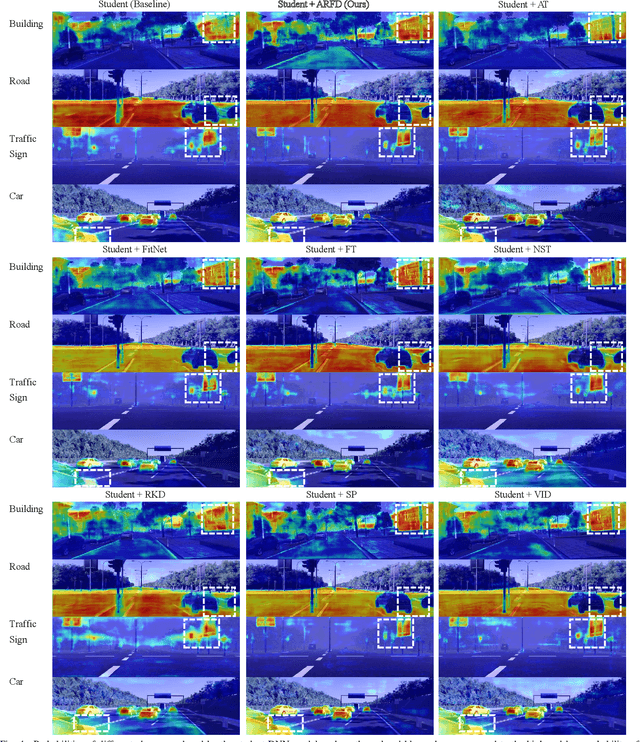
Despite the impressive performance achieved by data-fusion networks with duplex encoders for visual semantic segmentation, they become ineffective when spatial geometric data are not available. Implicitly infusing the spatial geometric prior knowledge acquired by a duplex-encoder teacher model into a single-encoder student model is a practical, albeit less explored research avenue. This paper delves into this topic and resorts to knowledge distillation approaches to address this problem. We introduce the Learning to Infuse "X" (LIX) framework, with novel contributions in both logit distillation and feature distillation aspects. We present a mathematical proof that underscores the limitation of using a single fixed weight in decoupled knowledge distillation and introduce a logit-wise dynamic weight controller as a solution to this issue. Furthermore, we develop an adaptively-recalibrated feature distillation algorithm, including two technical novelties: feature recalibration via kernel regression and in-depth feature consistency quantification via centered kernel alignment. Extensive experiments conducted with intermediate-fusion and late-fusion networks across various public datasets provide both quantitative and qualitative evaluations, demonstrating the superior performance of our LIX framework when compared to other state-of-the-art approaches.
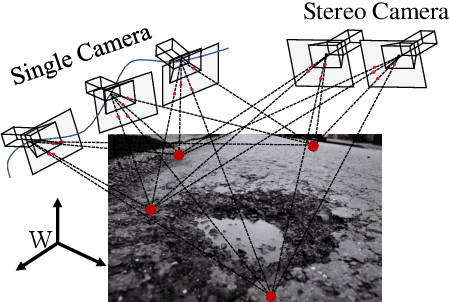
UDTIRI: An Open-Source Road Pothole Detection Benchmark Suite
Apr 18, 2023
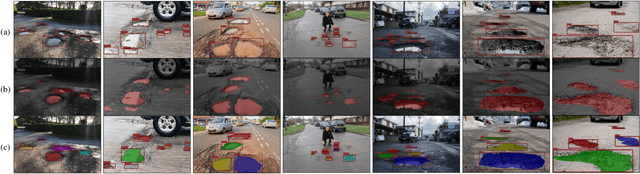

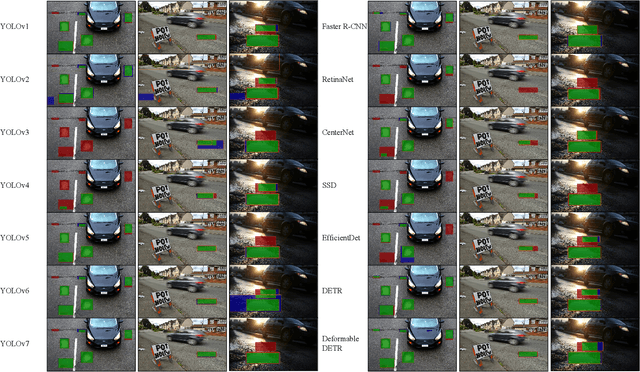
It is seen that there is enormous potential to leverage powerful deep learning methods in the emerging field of urban digital twins. It is particularly in the area of intelligent road inspection where there is currently limited research and data available. To facilitate progress in this field, we have developed a well-labeled road pothole dataset named Urban Digital Twins Intelligent Road Inspection (UDTIRI) dataset. We hope this dataset will enable the use of powerful deep learning methods in urban road inspection, providing algorithms with a more comprehensive understanding of the scene and maximizing their potential. Our dataset comprises 1000 images of potholes, captured in various scenarios with different lighting and humidity conditions. Our intention is to employ this dataset for object detection, semantic segmentation, and instance segmentation tasks. Our team has devoted significant effort to conducting a detailed statistical analysis, and benchmarking a selection of representative algorithms from recent years. We also provide a multi-task platform for researchers to fully exploit the performance of various algorithms with the support of UDTIRI dataset.
Computer-Aided Road Inspection: Systems and Algorithms
Mar 04, 2022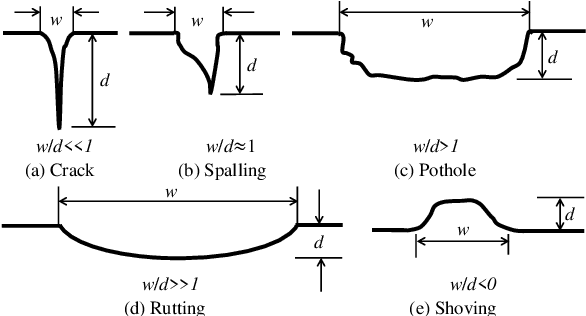
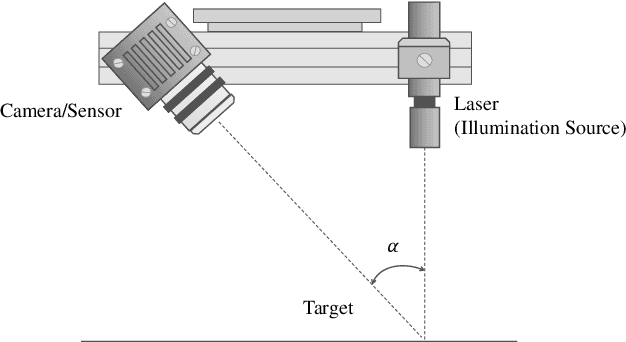

Road damage is an inconvenience and a safety hazard, severely affecting vehicle condition, driving comfort, and traffic safety. The traditional manual visual road inspection process is pricey, dangerous, exhausting, and cumbersome. Also, manual road inspection results are qualitative and subjective, as they depend entirely on the inspector's personal experience. Therefore, there is an ever-increasing need for automated road inspection systems. This chapter first compares the five most common road damage types. Then, 2-D/3-D road imaging systems are discussed. Finally, state-of-the-art machine vision and intelligence-based road damage detection algorithms are introduced.