 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanTwin: Privacy-Preserving Planning Abstractions for Cloud-Assisted LLM Agents
Mar 19, 2026Cloud-hosted large language models (LLMs) have become the de facto planners in agentic systems, coordinating tools and guiding execution over local environments. In many deployments, however, the environment being planned over is private, containing source code, files, credentials, and metadata that cannot be exposed to the cloud. Existing solutions address adjacent concerns, such as execution isolation, access control, or confidential inference, but they do not control what cloud planners observe during planning: within the permitted scope, \textit{raw environment state is still exposed}. We introduce PlanTwin, a privacy-preserving architecture for cloud-assisted planning without exposing raw local context. The key idea is to project the real environment into a \textit{planning-oriented digital twin}: a schema-constrained and de-identified abstract graph that preserves planning-relevant structure while removing reconstructable details. The cloud planner operates solely on this sanitized twin through a bounded capability interface, while a local gatekeeper enforces safety policies and cumulative disclosure budgets. We further formalize the privacy-utility trade-off as a capability granularity problem, define architectural privacy goals using $(k,δ)$-anonymity and $ε$-unlinkability, and mitigate compositional leakage through multi-turn disclosure control. We implement PlanTwin as middleware between local agents and cloud planners and evaluate it on 60 agentic tasks across ten domains with four cloud planners. PlanTwin achieves full sensitive-item non-disclosure (SND = 1.0) while maintaining planning quality close to full-context systems: three of four planners achieve PQS $> 0.79$, and the full pipeline incurs less than 2.2\% utility loss.
Hard constraint learning approaches with trainable influence functions for evolutionary equations
Feb 21, 2025

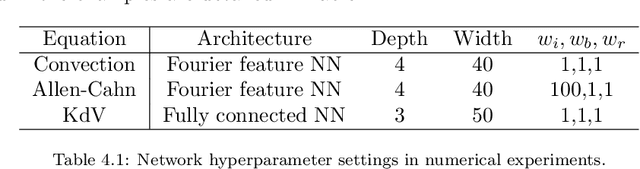

This paper develops a novel deep learning approach for solving evolutionary equations, which integrates sequential learning strategies with an enhanced hard constraint strategy featuring trainable parameters, addressing the low computational accuracy of standard Physics-Informed Neural Networks (PINNs) in large temporal domains.Sequential learning strategies divide a large temporal domain into multiple subintervals and solve them one by one in a chronological order, which naturally respects the principle of causality and improves the stability of the PINN solution. The improved hard constraint strategy strictly ensures the continuity and smoothness of the PINN solution at time interval nodes, and at the same time passes the information from the previous interval to the next interval, which avoids the incorrect/trivial solution at the position far from the initial time. Furthermore, by investigating the requirements of different types of equations on hard constraints, we design a novel influence function with trainable parameters for hard constraints, which provides theoretical and technical support for the effective implementations of hard constraint strategies, and significantly improves the universality and computational accuracy of our method. In addition, an adaptive time-domain partitioning algorithm is proposed, which plays an important role in the application of the proposed method as well as in the improvement of computational efficiency and accuracy. Numerical experiments verify the performance of the method. The data and code accompanying this paper are available at https://github.com/zhizhi4452/HCS.
E3CM: Epipolar-Constrained Cascade Correspondence Matching
Aug 31, 2023Accurate and robust correspondence matching is of utmost importance for various 3D computer vision tasks. However, traditional explicit programming-based methods often struggle to handle challenging scenarios, and deep learning-based methods require large well-labeled datasets for network training. In this article, we introduce Epipolar-Constrained Cascade Correspondence (E3CM), a novel approach that addresses these limitations. Unlike traditional methods, E3CM leverages pre-trained convolutional neural networks to match correspondence, without requiring annotated data for any network training or fine-tuning. Our method utilizes epipolar constraints to guide the matching process and incorporates a cascade structure for progressive refinement of matches. We extensively evaluate the performance of E3CM through comprehensive experiments and demonstrate its superiority over existing methods. To promote further research and facilitate reproducibility, we make our source code publicly available at https://mias.group/E3CM.
UDTIRI: An Open-Source Road Pothole Detection Benchmark Suite
Apr 18, 2023
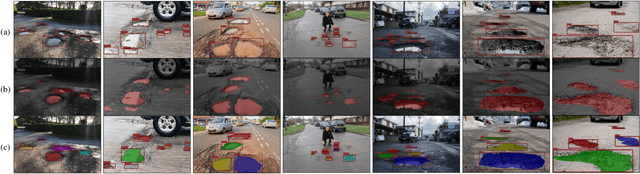

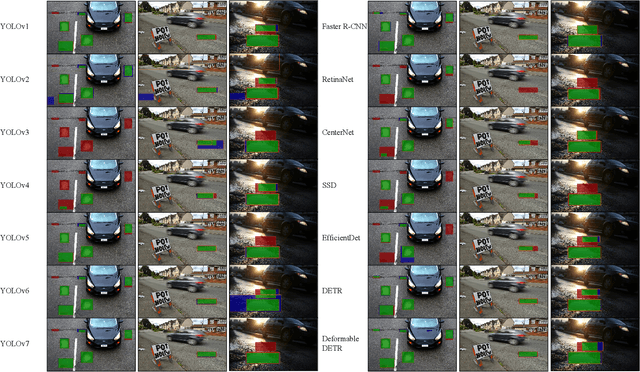
It is seen that there is enormous potential to leverage powerful deep learning methods in the emerging field of urban digital twins. It is particularly in the area of intelligent road inspection where there is currently limited research and data available. To facilitate progress in this field, we have developed a well-labeled road pothole dataset named Urban Digital Twins Intelligent Road Inspection (UDTIRI) dataset. We hope this dataset will enable the use of powerful deep learning methods in urban road inspection, providing algorithms with a more comprehensive understanding of the scene and maximizing their potential. Our dataset comprises 1000 images of potholes, captured in various scenarios with different lighting and humidity conditions. Our intention is to employ this dataset for object detection, semantic segmentation, and instance segmentation tasks. Our team has devoted significant effort to conducting a detailed statistical analysis, and benchmarking a selection of representative algorithms from recent years. We also provide a multi-task platform for researchers to fully exploit the performance of various algorithms with the support of UDTIRI dataset.
SIM2E: Benchmarking the Group Equivariant Capability of Correspondence Matching Algorithms
Aug 21, 2022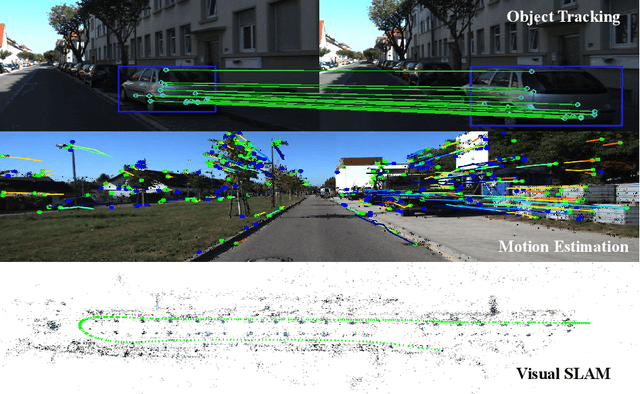
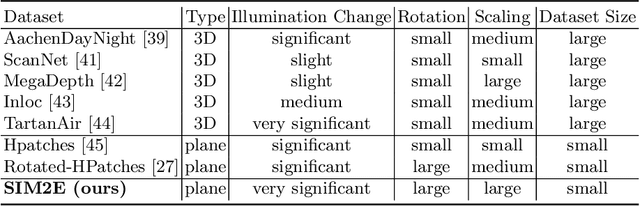
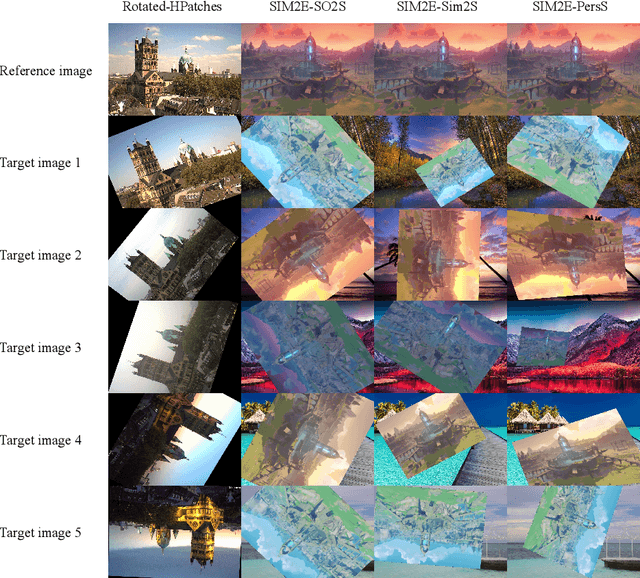
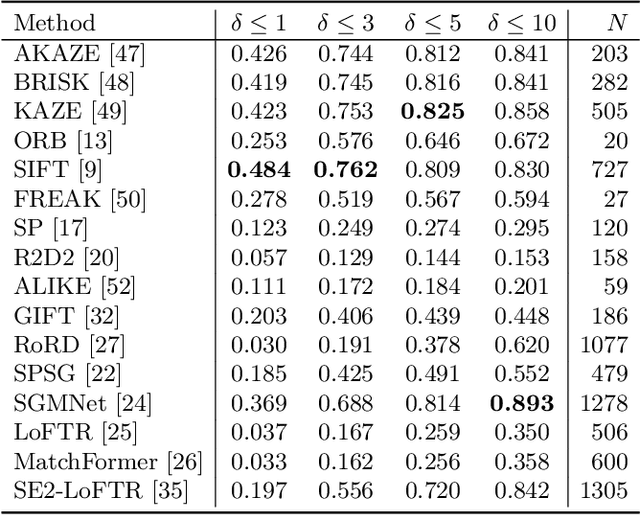
Correspondence matching is a fundamental problem in computer vision and robotics applications. Solving correspondence matching problems using neural networks has been on the rise recently. Rotation-equivariance and scale-equivariance are both critical in correspondence matching applications. Classical correspondence matching approaches are designed to withstand scaling and rotation transformations. However, the features extracted using convolutional neural networks (CNNs) are only translation-equivariant to a certain extent. Recently, researchers have strived to improve the rotation-equivariance of CNNs based on group theories. Sim(2) is the group of similarity transformations in the 2D plane. This paper presents a specialized dataset dedicated to evaluating sim(2)-equivariant correspondence matching algorithms. We compare the performance of 16 state-of-the-art (SoTA) correspondence matching approaches. The experimental results demonstrate the importance of group equivariant algorithms for correspondence matching on various sim(2) transformation conditions. Since the subpixel accuracy achieved by CNN-based correspondence matching approaches is unsatisfactory, this specific area requires more attention in future works. Our dataset is publicly available at: mias.group/SIM2E.
Search for or Navigate to? Dual Adaptive Thinking for Object Navigation
Aug 13, 2022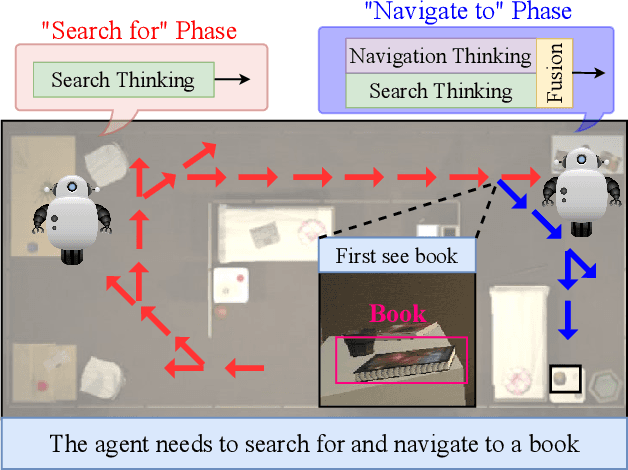
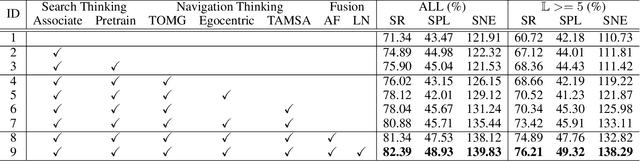
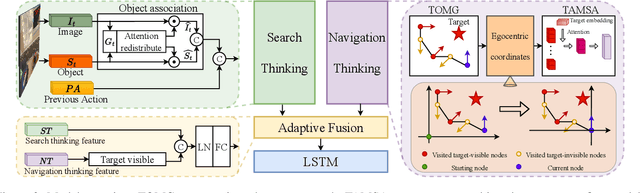
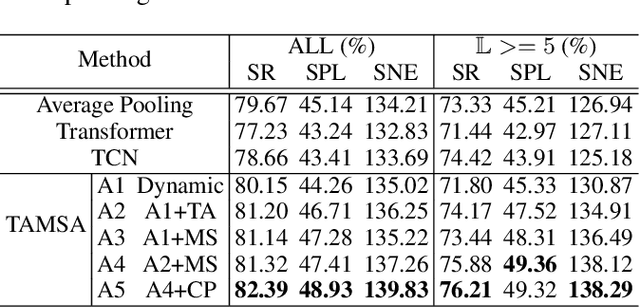
"Search for" or "Navigate to"? When finding an object, the two choices always come up in our subconscious mind. Before seeing the target, we search for the target based on experience. After seeing the target, we remember the target location and navigate to. However, recently methods in object navigation field almost only consider using object association to enhance "search for" phase while neglect the importance of "navigate to" phase. Therefore, this paper proposes the dual adaptive thinking (DAT) method to flexibly adjust the different thinking strategies at different navigation stages. Dual thinking includes search thinking with the object association ability and navigation thinking with the target location ability. To make the navigation thinking more effective, we design the target-oriented memory graph (TOMG) to store historical target information and the target-aware multi-scale aggregator (TAMSA) to encode the relative target position. We assess our methods on the AI2-Thor dataset. Compared with the state-of-the-art (SOTA) method, our method reports 10.8%, 21.5% and 15.7% increase in success rate (SR), success weighted by path length (SPL) and success weighted by navigation efficiency (SNE), respectively.