 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThese Maps Are Made by Propagation: Adapting Deep Stereo Networks to Road Scenarios with Decisive Disparity Diffusion
Paper and Code
Nov 06, 2024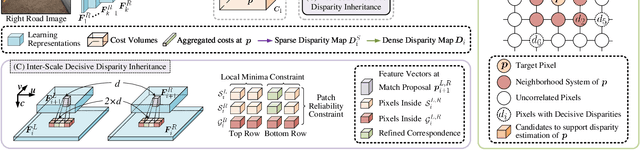
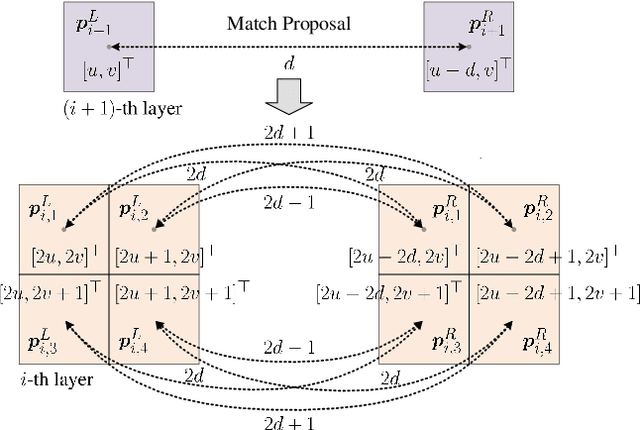
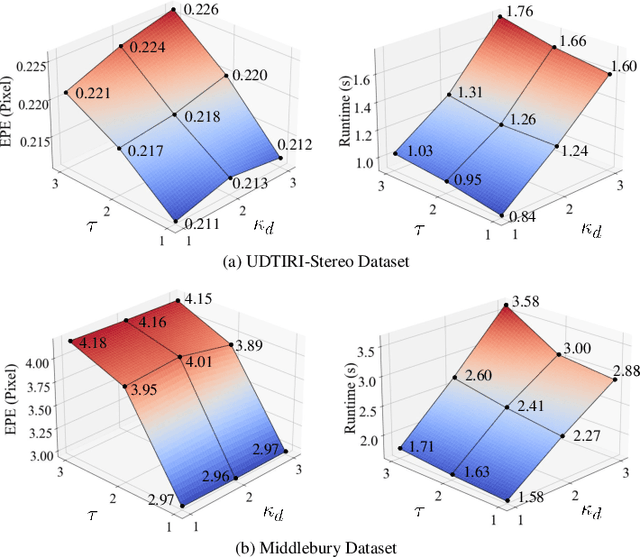
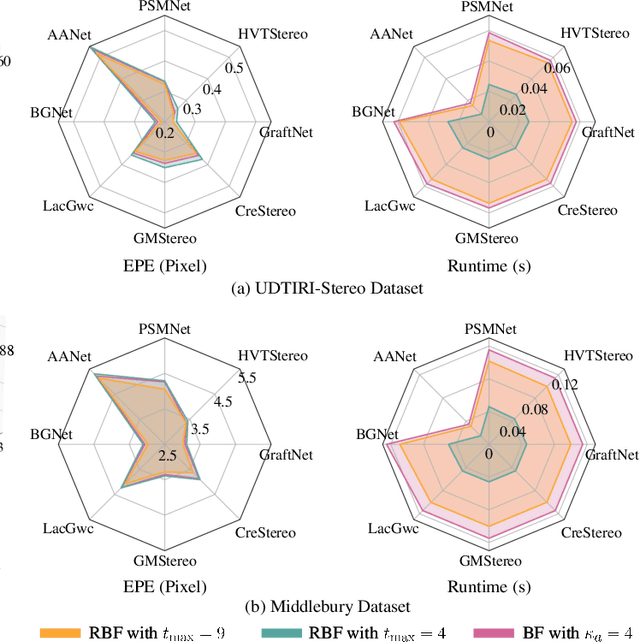
Stereo matching has emerged as a cost-effective solution for road surface 3D reconstruction, garnering significant attention towards improving both computational efficiency and accuracy. This article introduces decisive disparity diffusion (D3Stereo), marking the first exploration of dense deep feature matching that adapts pre-trained deep convolutional neural networks (DCNNs) to previously unseen road scenarios. A pyramid of cost volumes is initially created using various levels of learned representations. Subsequently, a novel recursive bilateral filtering algorithm is employed to aggregate these costs. A key innovation of D3Stereo lies in its alternating decisive disparity diffusion strategy, wherein intra-scale diffusion is employed to complete sparse disparity images, while inter-scale inheritance provides valuable prior information for higher resolutions. Extensive experiments conducted on our created UDTIRI-Stereo and Stereo-Road datasets underscore the effectiveness of D3Stereo strategy in adapting pre-trained DCNNs and its superior performance compared to all other explicit programming-based algorithms designed specifically for road surface 3D reconstruction. Additional experiments conducted on the Middlebury dataset with backbone DCNNs pre-trained on the ImageNet database further validate the versatility of D3Stereo strategy in tackling general stereo matching problems.