 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat do near-optimal learning rate schedules look like?
Mar 11, 2026A basic unanswered question in neural network training is: what is the best learning rate schedule shape for a given workload? The choice of learning rate schedule is a key factor in the success or failure of the training process, but beyond having some kind of warmup and decay, there is no consensus on what makes a good schedule shape. To answer this question, we designed a search procedure to find the best shapes within a parameterized schedule family. Our approach factors out the schedule shape from the base learning rate, which otherwise would dominate cross-schedule comparisons. We applied our search procedure to a variety of schedule families on three workloads: linear regression, image classification on CIFAR-10, and small-scale language modeling on Wikitext103. We showed that our search procedure indeed generally found near-optimal schedules. We found that warmup and decay are robust features of good schedules, and that commonly used schedule families are not optimal on these workloads. Finally, we explored how the outputs of our shape search depend on other optimization hyperparameters, and found that weight decay can have a strong effect on the optimal schedule shape. To the best of our knowledge, our results represent the most comprehensive results on near-optimal schedule shapes for deep neural network training, to date.
How far away are truly hyperparameter-free learning algorithms?
May 29, 2025Despite major advances in methodology, hyperparameter tuning remains a crucial (and expensive) part of the development of machine learning systems. Even ignoring architectural choices, deep neural networks have a large number of optimization and regularization hyperparameters that need to be tuned carefully per workload in order to obtain the best results. In a perfect world, training algorithms would not require workload-specific hyperparameter tuning, but would instead have default settings that performed well across many workloads. Recently, there has been a growing literature on optimization methods which attempt to reduce the number of hyperparameters -- particularly the learning rate and its accompanying schedule. Given these developments, how far away is the dream of neural network training algorithms that completely obviate the need for painful tuning? In this paper, we evaluate the potential of learning-rate-free methods as components of hyperparameter-free methods. We freeze their (non-learning rate) hyperparameters to default values, and score their performance using the recently-proposed AlgoPerf: Training Algorithms benchmark. We found that literature-supplied default settings performed poorly on the benchmark, so we performed a search for hyperparameter configurations that performed well across all workloads simultaneously. The best AlgoPerf-calibrated learning-rate-free methods had much improved performance but still lagged slightly behind a similarly calibrated NadamW baseline in overall benchmark score. Our results suggest that there is still much room for improvement for learning-rate-free methods, and that testing against a strong, workload-agnostic baseline is important to improve hyperparameter reduction techniques.
Training neural networks faster with minimal tuning using pre-computed lists of hyperparameters for NAdamW
Mar 06, 2025



If we want to train a neural network using any of the most popular optimization algorithms, we are immediately faced with a dilemma: how to set the various optimization and regularization hyperparameters? When computational resources are abundant, there are a variety of methods for finding good hyperparameter settings, but when resources are limited the only realistic choices are using standard default values of uncertain quality and provenance, or tuning only a couple of the most important hyperparameters via extremely limited handdesigned sweeps. Extending the idea of default settings to a modest tuning budget, Metz et al. (2020) proposed using ordered lists of well-performing hyperparameter settings, derived from a broad hyperparameter search on a large library of training workloads. However, to date, no practical and performant hyperparameter lists that generalize to representative deep learning workloads have been demonstrated. In this paper, we present hyperparameter lists for NAdamW derived from extensive experiments on the realistic workloads in the AlgoPerf: Training Algorithms benchmark. Our hyperparameter lists also include values for basic regularization techniques (i.e. weight decay, label smoothing, and dropout). In particular, our best NAdamW hyperparameter list performs well on AlgoPerf held-out workloads not used to construct it, and represents a compelling turn-key approach to tuning when restricted to five or fewer trials. It also outperforms basic learning rate/weight decay sweeps and an off-the-shelf Bayesian optimization tool when restricted to the same budget.
Accelerating Neural Network Training: An Analysis of the AlgoPerf Competition
Feb 20, 2025



The goal of the AlgoPerf: Training Algorithms competition is to evaluate practical speed-ups in neural network training achieved solely by improving the underlying training algorithms. In the external tuning ruleset, submissions must provide workload-agnostic hyperparameter search spaces, while in the self-tuning ruleset they must be completely hyperparameter-free. In both rulesets, submissions are compared on time-to-result across multiple deep learning workloads, training on fixed hardware. This paper presents the inaugural AlgoPerf competition's results, which drew 18 diverse submissions from 10 teams. Our investigation reveals several key findings: (1) The winning submission in the external tuning ruleset, using Distributed Shampoo, demonstrates the effectiveness of non-diagonal preconditioning over popular methods like Adam, even when compared on wall-clock runtime. (2) The winning submission in the self-tuning ruleset, based on the Schedule Free AdamW algorithm, demonstrates a new level of effectiveness for completely hyperparameter-free training algorithms. (3) The top-scoring submissions were surprisingly robust to workload changes. We also discuss the engineering challenges encountered in ensuring a fair comparison between different training algorithms. These results highlight both the significant progress so far, and the considerable room for further improvements.
Benchmarking Neural Network Training Algorithms
Jun 12, 2023



Training algorithms, broadly construed, are an essential part of every deep learning pipeline. Training algorithm improvements that speed up training across a wide variety of workloads (e.g., better update rules, tuning protocols, learning rate schedules, or data selection schemes) could save time, save computational resources, and lead to better, more accurate, models. Unfortunately, as a community, we are currently unable to reliably identify training algorithm improvements, or even determine the state-of-the-art training algorithm. In this work, using concrete experiments, we argue that real progress in speeding up training requires new benchmarks that resolve three basic challenges faced by empirical comparisons of training algorithms: (1) how to decide when training is complete and precisely measure training time, (2) how to handle the sensitivity of measurements to exact workload details, and (3) how to fairly compare algorithms that require hyperparameter tuning. In order to address these challenges, we introduce a new, competitive, time-to-result benchmark using multiple workloads running on fixed hardware, the AlgoPerf: Training Algorithms benchmark. Our benchmark includes a set of workload variants that make it possible to detect benchmark submissions that are more robust to workload changes than current widely-used methods. Finally, we evaluate baseline submissions constructed using various optimizers that represent current practice, as well as other optimizers that have recently received attention in the literature. These baseline results collectively demonstrate the feasibility of our benchmark, show that non-trivial gaps between methods exist, and set a provisional state-of-the-art for future benchmark submissions to try and surpass.
Geometry encoding for numerical simulations
Apr 15, 2021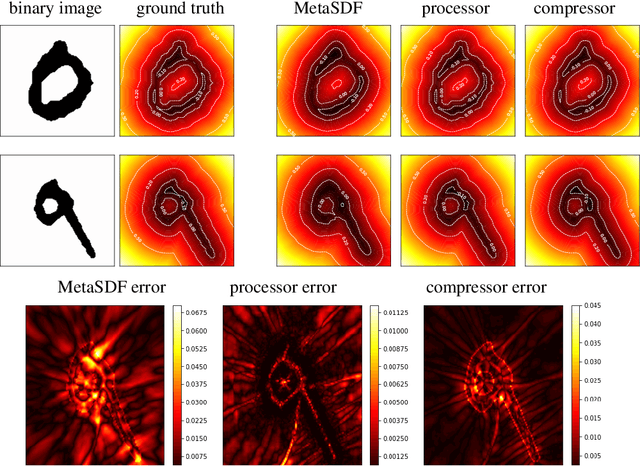
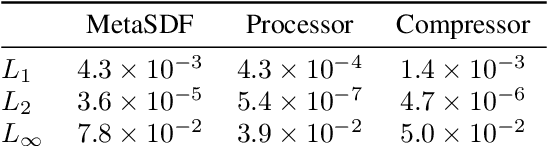
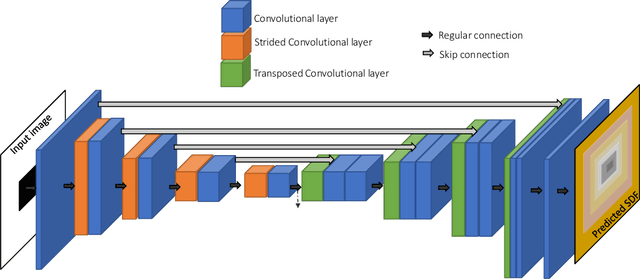
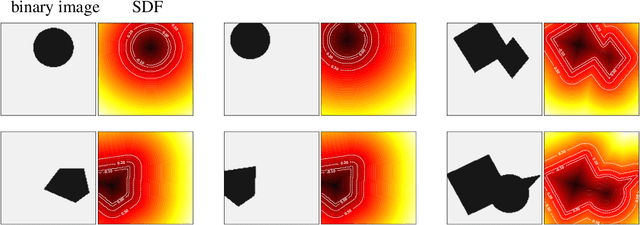
We present a notion of geometry encoding suitable for machine learning-based numerical simulation. In particular, we delineate how this notion of encoding is different than other encoding algorithms commonly used in other disciplines such as computer vision and computer graphics. We also present a model comprised of multiple neural networks including a processor, a compressor and an evaluator.These parts each satisfy a particular requirement of our encoding. We compare our encoding model with the analogous models in the literature
One-shot learning for solution operators of partial differential equations
Apr 06, 2021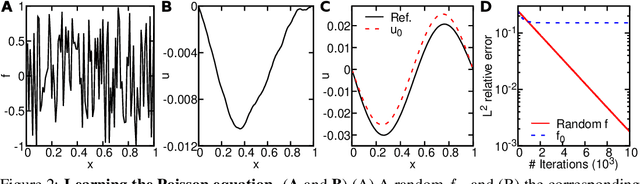
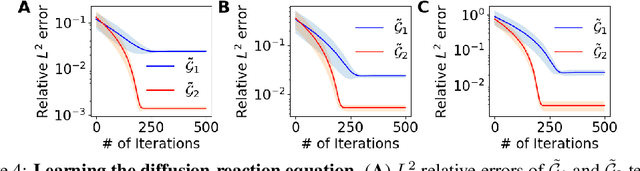
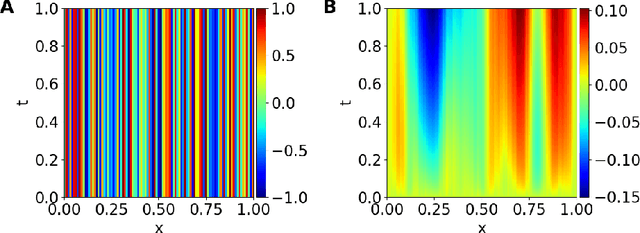
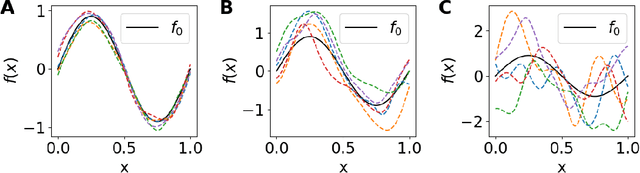
Discovering governing equations of a physical system, represented by partial differential equations (PDEs), from data is a central challenge in a variety of areas of science and engineering. Current methods require either some prior knowledge (e.g., candidate PDE terms) to discover the PDE form, or a large dataset to learn a surrogate model of the PDE solution operator. Here, we propose the first learning method that only needs one PDE solution, i.e., one-shot learning. We first decompose the entire computational domain into small domains, where we learn a local solution operator, and then find the coupled solution via a fixed-point iteration. We demonstrate the effectiveness of our method on different PDEs, and our method exhibits a strong generalization property.
Interactive Gibson: A Benchmark for Interactive Navigation in Cluttered Environments
Oct 30, 2019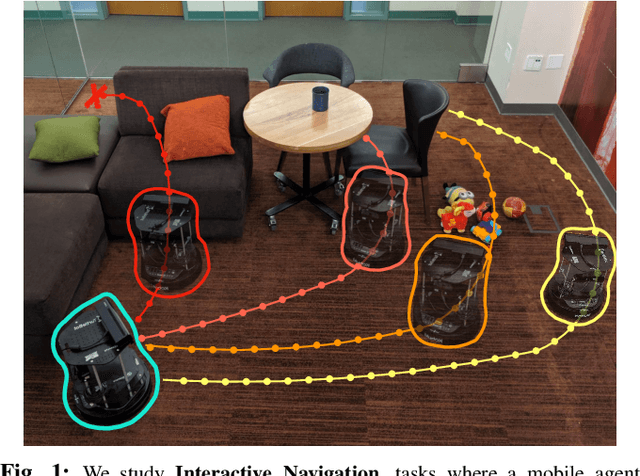
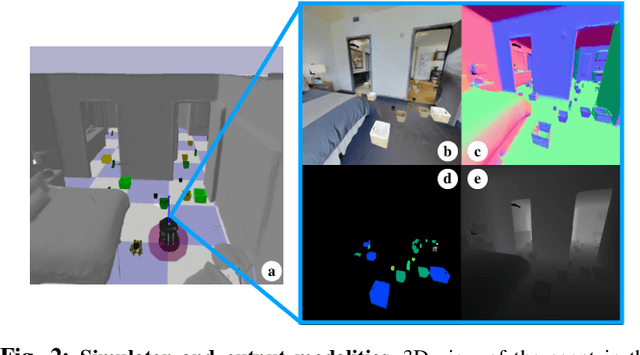
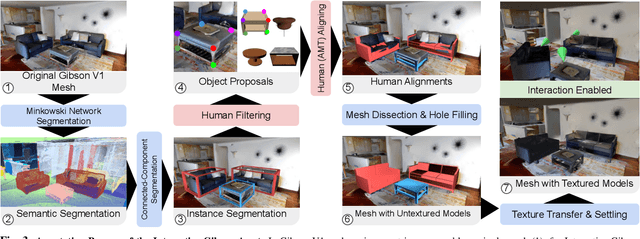
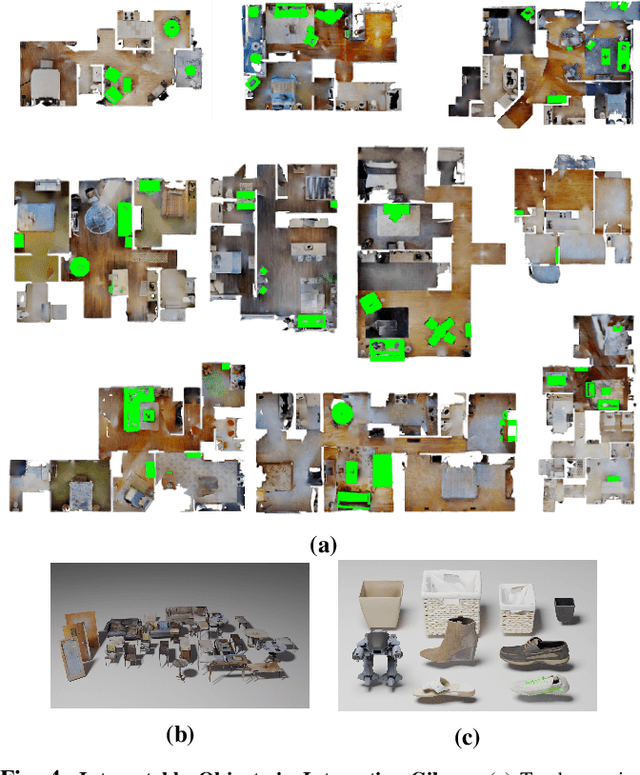
We present Interactive Gibson, the first comprehensive benchmark for training and evaluating Interactive Navigation: robot navigation strategies where physical interaction with objects is allowed and even encouraged to accomplish a task. For example, the robot can move objects if needed in order to clear a path leading to the goal location. Our benchmark comprises two novel elements: 1) a new experimental setup, the Interactive Gibson Environment, which simulates high fidelity visuals of indoor scenes, and high fidelity physical dynamics of the robot and common objects found in these scenes; 2) a set of Interactive Navigation metrics which allows one to study the interplay between navigation and physical interaction. We present and evaluate multiple learning-based baselines in Interactive Gibson, and provide insights into regimes of navigation with different trade-offs between navigation path efficiency and disturbance of surrounding objects. We make our benchmark publicly available(https://sites.google.com/view/interactivegibsonenv) and encourage researchers from all disciplines in robotics (e.g. planning, learning, control) to propose, evaluate, and compare their Interactive Navigation solutions in Interactive Gibson.