 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Gibson: A Benchmark for Interactive Navigation in Cluttered Environments
Oct 30, 2019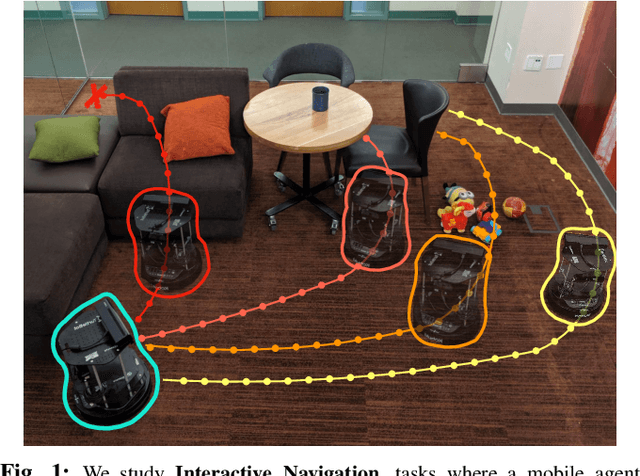
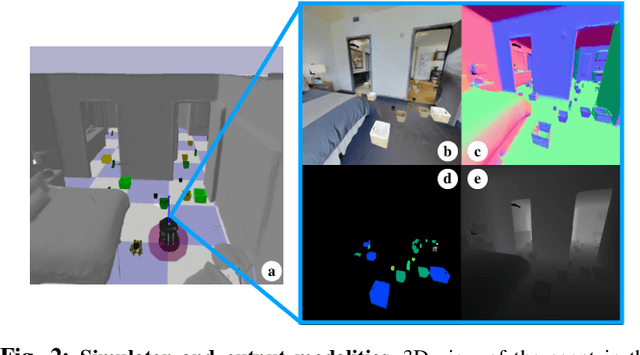
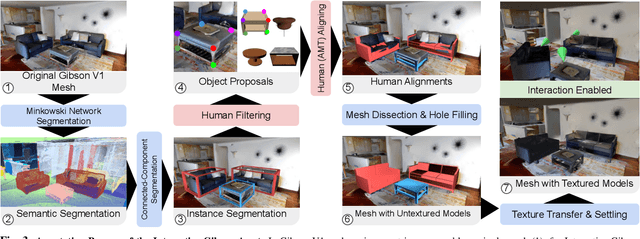
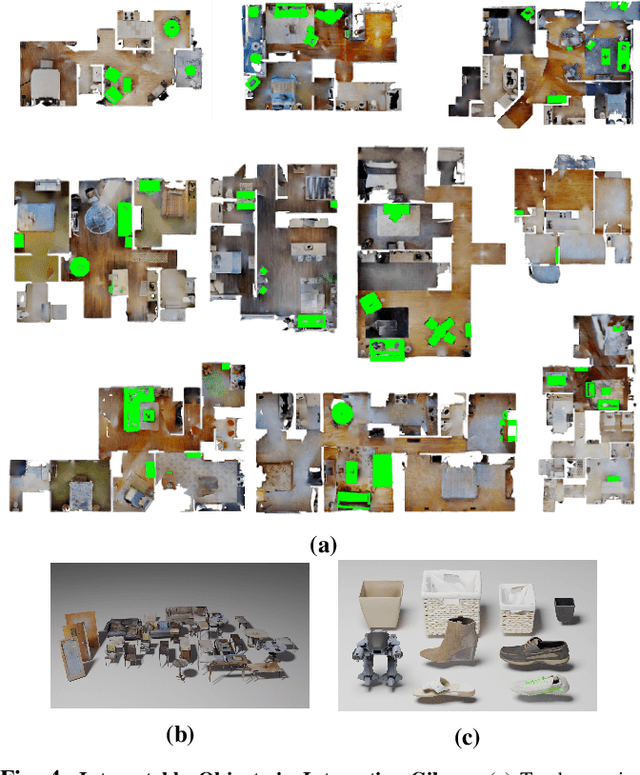
We present Interactive Gibson, the first comprehensive benchmark for training and evaluating Interactive Navigation: robot navigation strategies where physical interaction with objects is allowed and even encouraged to accomplish a task. For example, the robot can move objects if needed in order to clear a path leading to the goal location. Our benchmark comprises two novel elements: 1) a new experimental setup, the Interactive Gibson Environment, which simulates high fidelity visuals of indoor scenes, and high fidelity physical dynamics of the robot and common objects found in these scenes; 2) a set of Interactive Navigation metrics which allows one to study the interplay between navigation and physical interaction. We present and evaluate multiple learning-based baselines in Interactive Gibson, and provide insights into regimes of navigation with different trade-offs between navigation path efficiency and disturbance of surrounding objects. We make our benchmark publicly available(https://sites.google.com/view/interactivegibsonenv) and encourage researchers from all disciplines in robotics (e.g. planning, learning, control) to propose, evaluate, and compare their Interactive Navigation solutions in Interactive Gibson.