 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPRec: Bi-level User Modeling for Deep Recommenders
Oct 28, 2024



GPRec explicitly categorizes users into groups in a learnable manner and aligns them with corresponding group embeddings. We design the dual group embedding space to offer a diverse perspective on group preferences by contrasting positive and negative patterns. On the individual level, GPRec identifies personal preferences from ID-like features and refines the obtained individual representations to be independent of group ones, thereby providing a robust complement to the group-level modeling. We also present various strategies for the flexible integration of GPRec into various DRS models. Rigorous testing of GPRec on three public datasets has demonstrated significant improvements in recommendation quality.
Retro-FPN: Retrospective Feature Pyramid Network for Point Cloud Semantic Segmentation
Aug 18, 2023



Learning per-point semantic features from the hierarchical feature pyramid is essential for point cloud semantic segmentation. However, most previous methods suffered from ambiguous region features or failed to refine per-point features effectively, which leads to information loss and ambiguous semantic identification. To resolve this, we propose Retro-FPN to model the per-point feature prediction as an explicit and retrospective refining process, which goes through all the pyramid layers to extract semantic features explicitly for each point. Its key novelty is a retro-transformer for summarizing semantic contexts from the previous layer and accordingly refining the features in the current stage. In this way, the categorization of each point is conditioned on its local semantic pattern. Specifically, the retro-transformer consists of a local cross-attention block and a semantic gate unit. The cross-attention serves to summarize the semantic pattern retrospectively from the previous layer. And the gate unit carefully incorporates the summarized contexts and refines the current semantic features. Retro-FPN is a pluggable neural network that applies to hierarchical decoders. By integrating Retro-FPN with three representative backbones, including both point-based and voxel-based methods, we show that Retro-FPN can significantly improve performance over state-of-the-art backbones. Comprehensive experiments on widely used benchmarks can justify the effectiveness of our design. The source is available at https://github.com/AllenXiangX/Retro-FPN
PMP-Net++: Point Cloud Completion by Transformer-Enhanced Multi-step Point Moving Paths
Feb 28, 2022

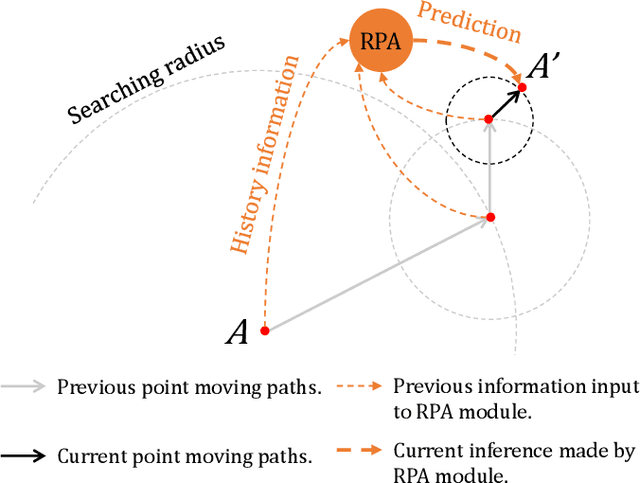

Point cloud completion concerns to predict missing part for incomplete 3D shapes. A common strategy is to generate complete shape according to incomplete input. However, unordered nature of point clouds will degrade generation of high-quality 3D shapes, as detailed topology and structure of unordered points are hard to be captured during the generative process using an extracted latent code. We address this problem by formulating completion as point cloud deformation process. Specifically, we design a novel neural network, named PMP-Net++, to mimic behavior of an earth mover. It moves each point of incomplete input to obtain a complete point cloud, where total distance of point moving paths (PMPs) should be the shortest. Therefore, PMP-Net++ predicts unique PMP for each point according to constraint of point moving distances. The network learns a strict and unique correspondence on point-level, and thus improves quality of predicted complete shape. Moreover, since moving points heavily relies on per-point features learned by network, we further introduce a transformer-enhanced representation learning network, which significantly improves completion performance of PMP-Net++. We conduct comprehensive experiments in shape completion, and further explore application on point cloud up-sampling, which demonstrate non-trivial improvement of PMP-Net++ over state-of-the-art point cloud completion/up-sampling methods.
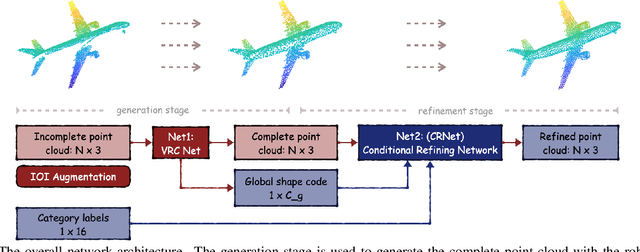
Snowflake Point Deconvolution for Point Cloud Completion and Generation with Skip-Transformer
Feb 22, 2022Most existing point cloud completion methods suffered from discrete nature of point clouds and unstructured prediction of points in local regions, which makes it hard to reveal fine local geometric details. To resolve this issue, we propose SnowflakeNet with Snowflake Point Deconvolution (SPD) to generate the complete point clouds. SPD models the generation of complete point clouds as the snowflake-like growth of points, where the child points are progressively generated by splitting their parent points after each SPD. Our insight of revealing detailed geometry is to introduce skip-transformer in SPD to learn point splitting patterns which can fit local regions the best. Skip-transformer leverages attention mechanism to summarize the splitting patterns used in previous SPD layer to produce the splitting in current SPD layer. The locally compact and structured point clouds generated by SPD precisely reveal the structure characteristic of 3D shape in local patches, which enables us to predict highly detailed geometries. Moreover, since SPD is a general operation, which is not limited to completion, we further explore the applications of SPD on other generative tasks, including point cloud auto-encoding, generation, single image reconstruction and upsampling. Our experimental results outperform the state-of-the-art methods under widely used benchmarks.
Multi-View Partial Point Cloud Challenge 2021 on Completion and Registration: Methods and Results
Dec 22, 2021
As real-scanned point clouds are mostly partial due to occlusions and viewpoints, reconstructing complete 3D shapes based on incomplete observations becomes a fundamental problem for computer vision. With a single incomplete point cloud, it becomes the partial point cloud completion problem. Given multiple different observations, 3D reconstruction can be addressed by performing partial-to-partial point cloud registration. Recently, a large-scale Multi-View Partial (MVP) point cloud dataset has been released, which consists of over 100,000 high-quality virtual-scanned partial point clouds. Based on the MVP dataset, this paper reports methods and results in the Multi-View Partial Point Cloud Challenge 2021 on Completion and Registration. In total, 128 participants registered for the competition, and 31 teams made valid submissions. The top-ranked solutions will be analyzed, and then we will discuss future research directions.
SnowflakeNet: Point Cloud Completion by Snowflake Point Deconvolution with Skip-Transformer
Aug 10, 2021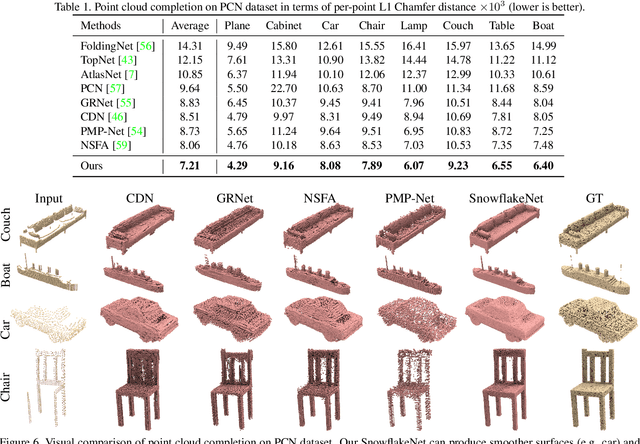

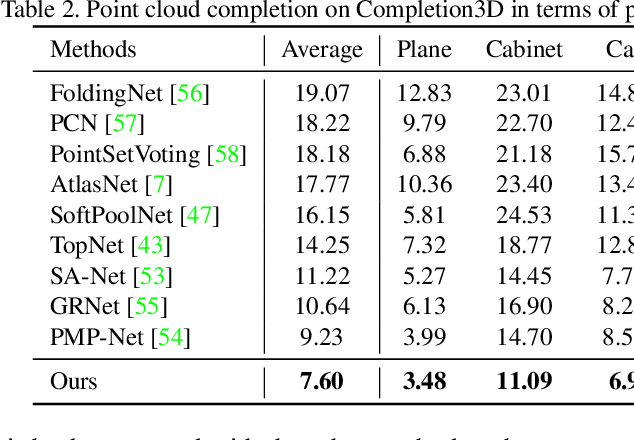
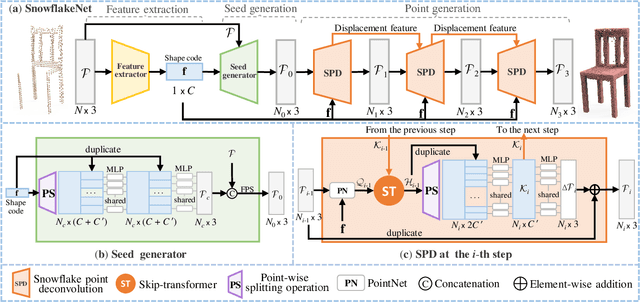
Point cloud completion aims to predict a complete shape in high accuracy from its partial observation. However, previous methods usually suffered from discrete nature of point cloud and unstructured prediction of points in local regions, which makes it hard to reveal fine local geometric details on the complete shape. To resolve this issue, we propose SnowflakeNet with Snowflake Point Deconvolution (SPD) to generate the complete point clouds. The SnowflakeNet models the generation of complete point clouds as the snowflake-like growth of points in 3D space, where the child points are progressively generated by splitting their parent points after each SPD. Our insight of revealing detailed geometry is to introduce skip-transformer in SPD to learn point splitting patterns which can fit local regions the best. Skip-transformer leverages attention mechanism to summarize the splitting patterns used in the previous SPD layer to produce the splitting in the current SPD layer. The locally compact and structured point cloud generated by SPD is able to precisely capture the structure characteristic of 3D shape in local patches, which enables the network to predict highly detailed geometries, such as smooth regions, sharp edges and corners. Our experimental results outperform the state-of-the-art point cloud completion methods under widely used benchmarks. Code will be available at https://github.com/AllenXiangX/SnowflakeNet.
PMP-Net: Point Cloud Completion by Learning Multi-step Point Moving Paths
Dec 07, 2020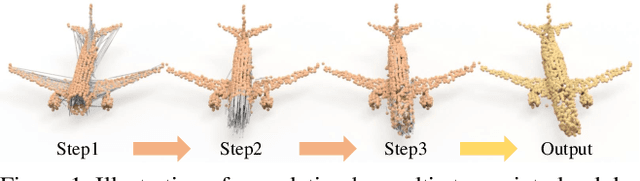
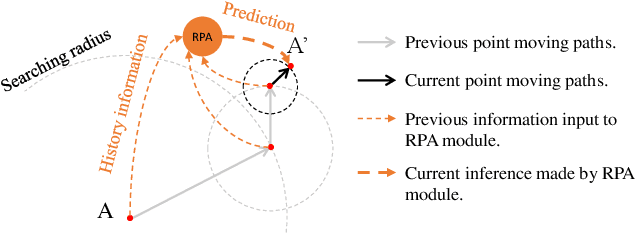
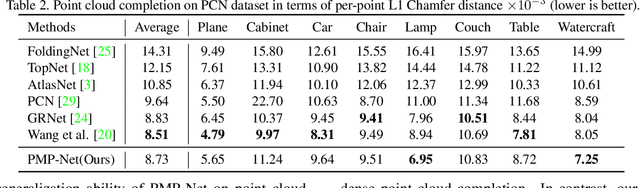
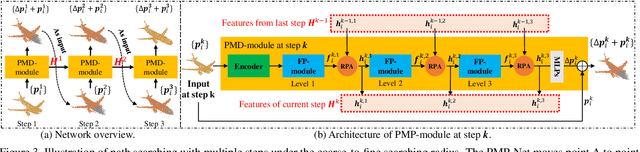
The task of point cloud completion aims to predict the missing part for an incomplete 3D shape. A widely used strategy is to generate a complete point cloud from the incomplete one. However, the unordered nature of point clouds will degrade the generation of high-quality 3D shapes, as the detailed topology and structure of discrete points are hard to be captured by the generative process only using a latent code. In this paper, we address the above problem by reconsidering the completion task from a new perspective, where we formulate the prediction as a point cloud deformation process. Specifically, we design a novel neural network, named PMP-Net, to mimic the behavior of an earth mover. It moves move each point of the incomplete input to complete the point cloud, where the total distance of point moving paths (PMP) should be shortest. Therefore, PMP-Net predicts a unique point moving path for each point according to the constraint of total point moving distances. As a result, the network learns a strict and unique correspondence on point-level, which can capture the detailed topology and structure relationships between the incomplete shape and the complete target, and thus improves the quality of the predicted complete shape. We conduct comprehensive experiments on Completion3D and PCN datasets, which demonstrate our advantages over the state-of-the-art point cloud completion methods.