 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNaviTrace: Evaluating Embodied Navigation of Vision-Language Models
Oct 30, 2025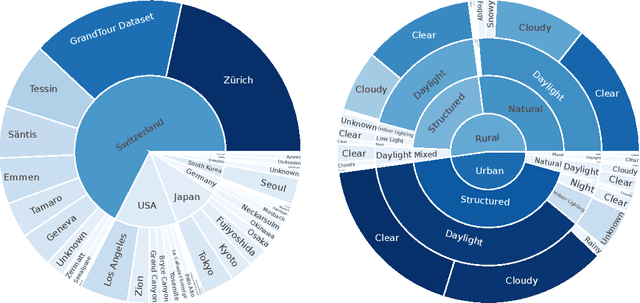
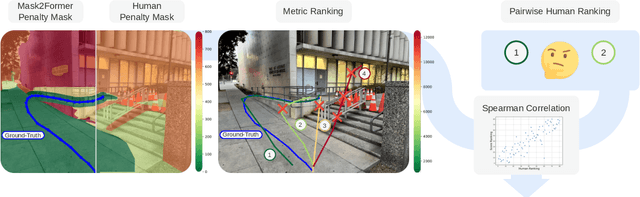
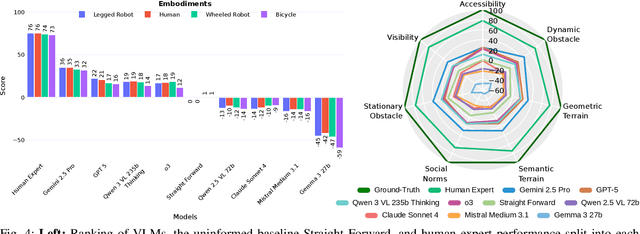
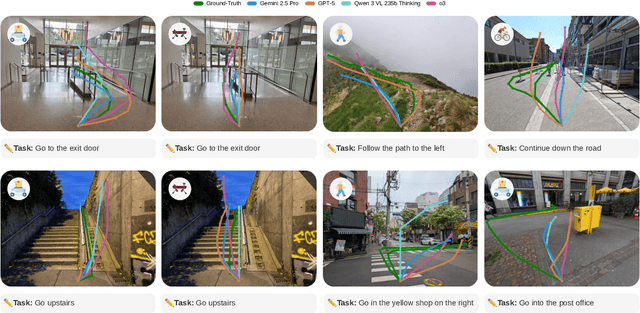
Vision-language models demonstrate unprecedented performance and generalization across a wide range of tasks and scenarios. Integrating these foundation models into robotic navigation systems opens pathways toward building general-purpose robots. Yet, evaluating these models' navigation capabilities remains constrained by costly real-world trials, overly simplified simulations, and limited benchmarks. We introduce NaviTrace, a high-quality Visual Question Answering benchmark where a model receives an instruction and embodiment type (human, legged robot, wheeled robot, bicycle) and must output a 2D navigation trace in image space. Across 1000 scenarios and more than 3000 expert traces, we systematically evaluate eight state-of-the-art VLMs using a newly introduced semantic-aware trace score. This metric combines Dynamic Time Warping distance, goal endpoint error, and embodiment-conditioned penalties derived from per-pixel semantics and correlates with human preferences. Our evaluation reveals consistent gap to human performance caused by poor spatial grounding and goal localization. NaviTrace establishes a scalable and reproducible benchmark for real-world robotic navigation. The benchmark and leaderboard can be found at https://leggedrobotics.github.io/navitrace_webpage/.
PointMapPolicy: Structured Point Cloud Processing for Multi-Modal Imitation Learning
Oct 23, 2025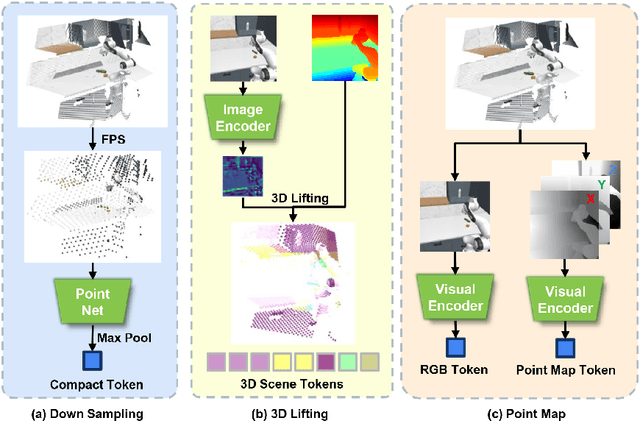
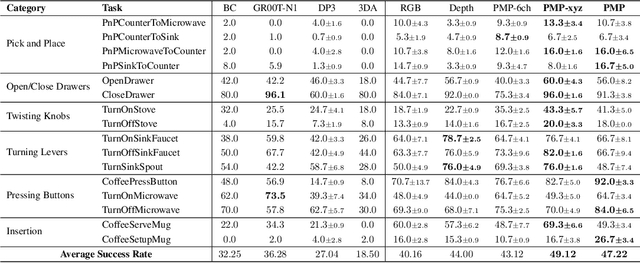
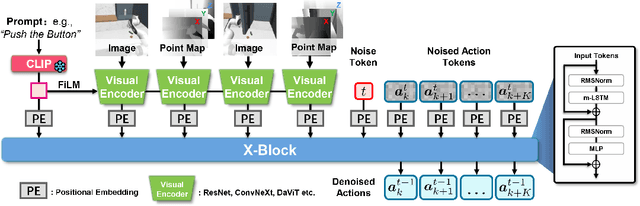
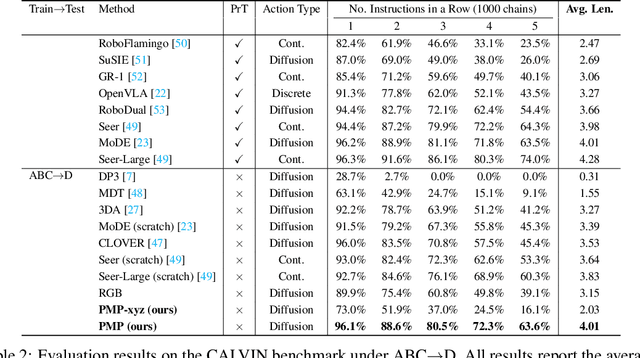
Robotic manipulation systems benefit from complementary sensing modalities, where each provides unique environmental information. Point clouds capture detailed geometric structure, while RGB images provide rich semantic context. Current point cloud methods struggle to capture fine-grained detail, especially for complex tasks, which RGB methods lack geometric awareness, which hinders their precision and generalization. We introduce PointMapPolicy, a novel approach that conditions diffusion policies on structured grids of points without downsampling. The resulting data type makes it easier to extract shape and spatial relationships from observations, and can be transformed between reference frames. Yet due to their structure in a regular grid, we enable the use of established computer vision techniques directly to 3D data. Using xLSTM as a backbone, our model efficiently fuses the point maps with RGB data for enhanced multi-modal perception. Through extensive experiments on the RoboCasa and CALVIN benchmarks and real robot evaluations, we demonstrate that our method achieves state-of-the-art performance across diverse manipulation tasks. The overview and demos are available on our project page: https://point-map.github.io/Point-Map/
FLOWER: Democratizing Generalist Robot Policies with Efficient Vision-Language-Action Flow Policies
Sep 05, 2025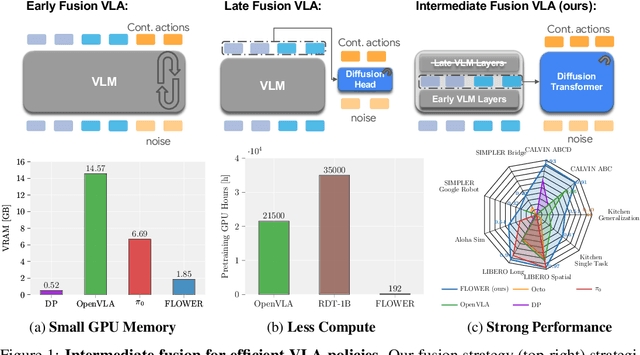
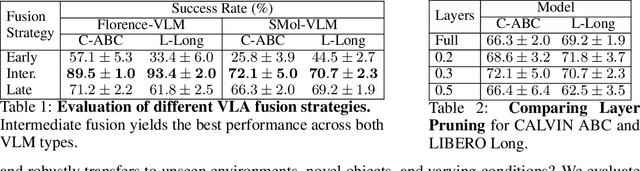
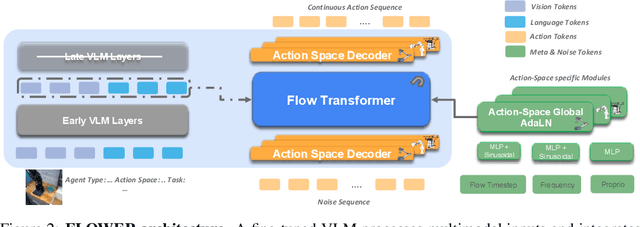
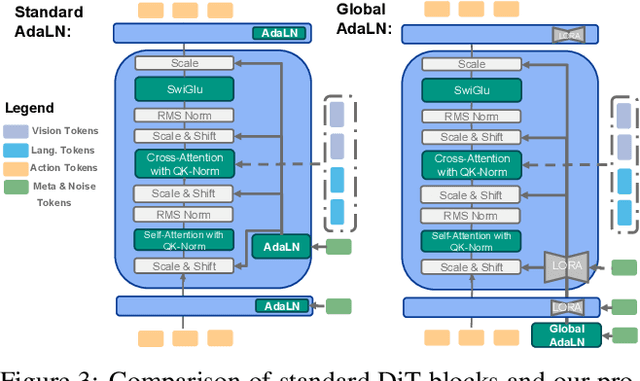
Developing efficient Vision-Language-Action (VLA) policies is crucial for practical robotics deployment, yet current approaches face prohibitive computational costs and resource requirements. Existing diffusion-based VLA policies require multi-billion-parameter models and massive datasets to achieve strong performance. We tackle this efficiency challenge with two contributions: intermediate-modality fusion, which reallocates capacity to the diffusion head by pruning up to $50\%$ of LLM layers, and action-specific Global-AdaLN conditioning, which cuts parameters by $20\%$ through modular adaptation. We integrate these advances into a novel 950 M-parameter VLA called FLOWER. Pretrained in just 200 H100 GPU hours, FLOWER delivers competitive performance with bigger VLAs across $190$ tasks spanning ten simulation and real-world benchmarks and demonstrates robustness across diverse robotic embodiments. In addition, FLOWER achieves a new SoTA of 4.53 on the CALVIN ABC benchmark. Demos, code and pretrained weights are available at https://intuitive-robots.github.io/flower_vla/.
BEAST: Efficient Tokenization of B-Splines Encoded Action Sequences for Imitation Learning
Jun 06, 2025We present the B-spline Encoded Action Sequence Tokenizer (BEAST), a novel action tokenizer that encodes action sequences into compact discrete or continuous tokens using B-splines. In contrast to existing action tokenizers based on vector quantization or byte pair encoding, BEAST requires no separate tokenizer training and consistently produces tokens of uniform length, enabling fast action sequence generation via parallel decoding. Leveraging our B-spline formulation, BEAST inherently ensures generating smooth trajectories without discontinuities between adjacent segments. We extensively evaluate BEAST by integrating it with three distinct model architectures: a Variational Autoencoder (VAE) with continuous tokens, a decoder-only Transformer with discrete tokens, and Florence-2, a pretrained Vision-Language Model with an encoder-decoder architecture, demonstrating BEAST's compatibility and scalability with large pretrained models. We evaluate BEAST across three established benchmarks consisting of 166 simulated tasks and on three distinct robot settings with a total of 8 real-world tasks. Experimental results demonstrate that BEAST (i) significantly reduces both training and inference computational costs, and (ii) consistently generates smooth, high-frequency control signals suitable for continuous control tasks while (iii) reliably achieves competitive task success rates compared to state-of-the-art methods.
Efficient Diffusion Transformer Policies with Mixture of Expert Denoisers for Multitask Learning
Dec 17, 2024Diffusion Policies have become widely used in Imitation Learning, offering several appealing properties, such as generating multimodal and discontinuous behavior. As models are becoming larger to capture more complex capabilities, their computational demands increase, as shown by recent scaling laws. Therefore, continuing with the current architectures will present a computational roadblock. To address this gap, we propose Mixture-of-Denoising Experts (MoDE) as a novel policy for Imitation Learning. MoDE surpasses current state-of-the-art Transformer-based Diffusion Policies while enabling parameter-efficient scaling through sparse experts and noise-conditioned routing, reducing both active parameters by 40% and inference costs by 90% via expert caching. Our architecture combines this efficient scaling with noise-conditioned self-attention mechanism, enabling more effective denoising across different noise levels. MoDE achieves state-of-the-art performance on 134 tasks in four established imitation learning benchmarks (CALVIN and LIBERO). Notably, by pretraining MoDE on diverse robotics data, we achieve 4.01 on CALVIN ABC and 0.95 on LIBERO-90. It surpasses both CNN-based and Transformer Diffusion Policies by an average of 57% across 4 benchmarks, while using 90% fewer FLOPs and fewer active parameters compared to default Diffusion Transformer architectures. Furthermore, we conduct comprehensive ablations on MoDE's components, providing insights for designing efficient and scalable Transformer architectures for Diffusion Policies. Code and demonstrations are available at https://mbreuss.github.io/MoDE_Diffusion_Policy/.
Scaling Robot Policy Learning via Zero-Shot Labeling with Foundation Models
Oct 23, 2024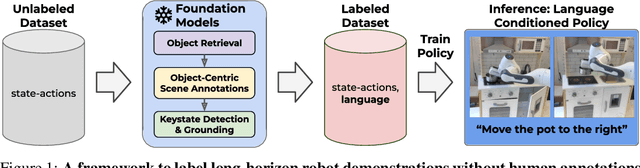
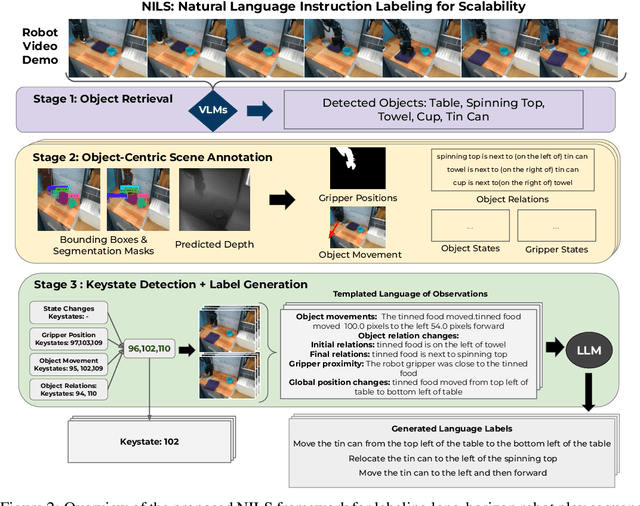
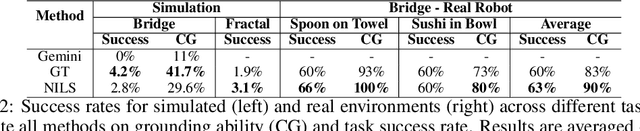

A central challenge towards developing robots that can relate human language to their perception and actions is the scarcity of natural language annotations in diverse robot datasets. Moreover, robot policies that follow natural language instructions are typically trained on either templated language or expensive human-labeled instructions, hindering their scalability. To this end, we introduce NILS: Natural language Instruction Labeling for Scalability. NILS automatically labels uncurated, long-horizon robot data at scale in a zero-shot manner without any human intervention. NILS combines pretrained vision-language foundation models in order to detect objects in a scene, detect object-centric changes, segment tasks from large datasets of unlabelled interaction data and ultimately label behavior datasets. Evaluations on BridgeV2, Fractal, and a kitchen play dataset show that NILS can autonomously annotate diverse robot demonstrations of unlabeled and unstructured datasets while alleviating several shortcomings of crowdsourced human annotations, such as low data quality and diversity. We use NILS to label over 115k trajectories obtained from over 430 hours of robot data. We open-source our auto-labeling code and generated annotations on our website: http://robottasklabeling.github.io.
Multimodal Diffusion Transformer: Learning Versatile Behavior from Multimodal Goals
Jul 08, 2024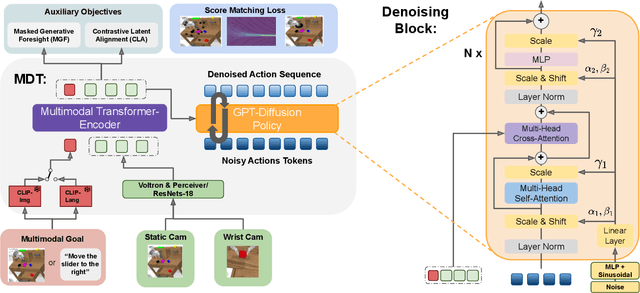
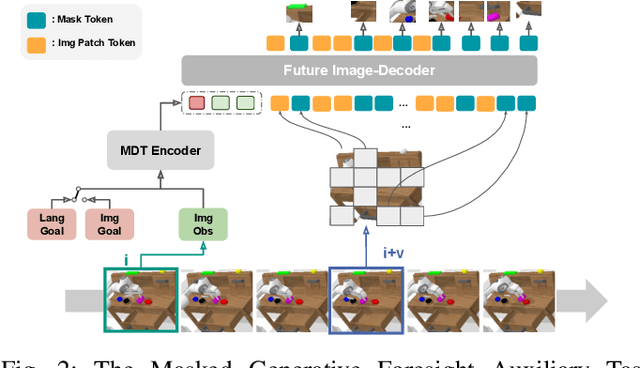
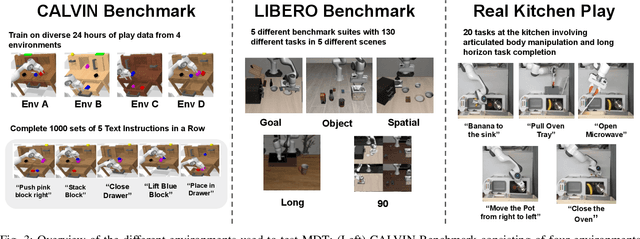
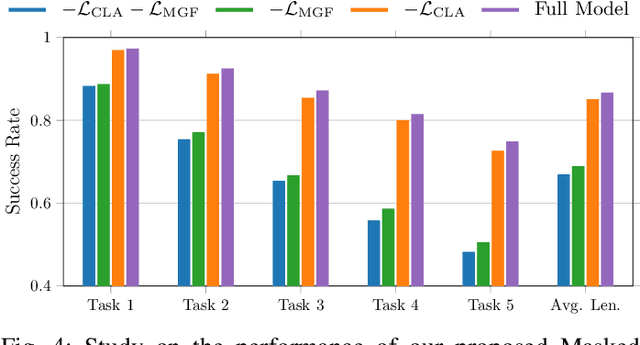
This work introduces the Multimodal Diffusion Transformer (MDT), a novel diffusion policy framework, that excels at learning versatile behavior from multimodal goal specifications with few language annotations. MDT leverages a diffusion-based multimodal transformer backbone and two self-supervised auxiliary objectives to master long-horizon manipulation tasks based on multimodal goals. The vast majority of imitation learning methods only learn from individual goal modalities, e.g. either language or goal images. However, existing large-scale imitation learning datasets are only partially labeled with language annotations, which prohibits current methods from learning language conditioned behavior from these datasets. MDT addresses this challenge by introducing a latent goal-conditioned state representation that is simultaneously trained on multimodal goal instructions. This state representation aligns image and language based goal embeddings and encodes sufficient information to predict future states. The representation is trained via two self-supervised auxiliary objectives, enhancing the performance of the presented transformer backbone. MDT shows exceptional performance on 164 tasks provided by the challenging CALVIN and LIBERO benchmarks, including a LIBERO version that contains less than $2\%$ language annotations. Furthermore, MDT establishes a new record on the CALVIN manipulation challenge, demonstrating an absolute performance improvement of $15\%$ over prior state-of-the-art methods that require large-scale pretraining and contain $10\times$ more learnable parameters. MDT shows its ability to solve long-horizon manipulation from sparsely annotated data in both simulated and real-world environments. Demonstrations and Code are available at https://intuitive-robots.github.io/mdt_policy/.
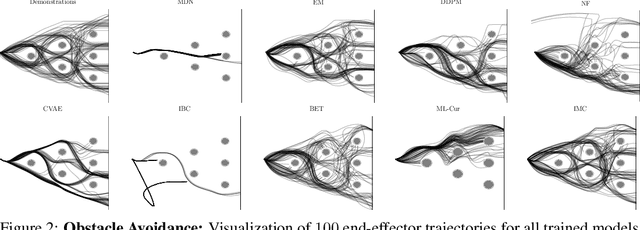
Towards Diverse Behaviors: A Benchmark for Imitation Learning with Human Demonstrations
Feb 22, 2024

Imitation learning with human data has demonstrated remarkable success in teaching robots in a wide range of skills. However, the inherent diversity in human behavior leads to the emergence of multi-modal data distributions, thereby presenting a formidable challenge for existing imitation learning algorithms. Quantifying a model's capacity to capture and replicate this diversity effectively is still an open problem. In this work, we introduce simulation benchmark environments and the corresponding Datasets with Diverse human Demonstrations for Imitation Learning (D3IL), designed explicitly to evaluate a model's ability to learn multi-modal behavior. Our environments are designed to involve multiple sub-tasks that need to be solved, consider manipulation of multiple objects which increases the diversity of the behavior and can only be solved by policies that rely on closed loop sensory feedback. Other available datasets are missing at least one of these challenging properties. To address the challenge of diversity quantification, we introduce tractable metrics that provide valuable insights into a model's ability to acquire and reproduce diverse behaviors. These metrics offer a practical means to assess the robustness and versatility of imitation learning algorithms. Furthermore, we conduct a thorough evaluation of state-of-the-art methods on the proposed task suite. This evaluation serves as a benchmark for assessing their capability to learn diverse behaviors. Our findings shed light on the effectiveness of these methods in tackling the intricate problem of capturing and generalizing multi-modal human behaviors, offering a valuable reference for the design of future imitation learning algorithms.
Goal-Conditioned Imitation Learning using Score-based Diffusion Policies
Apr 05, 2023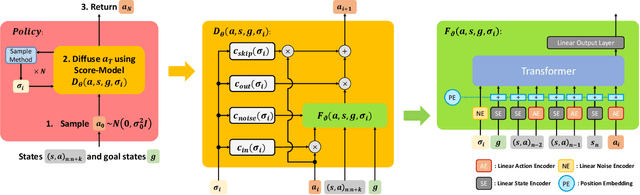
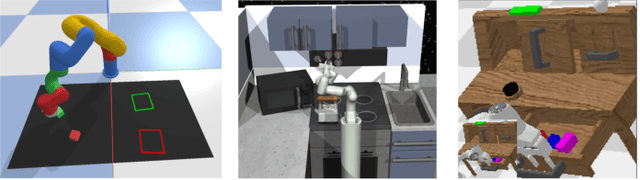

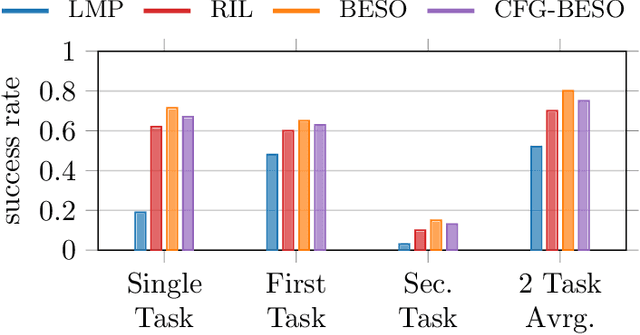
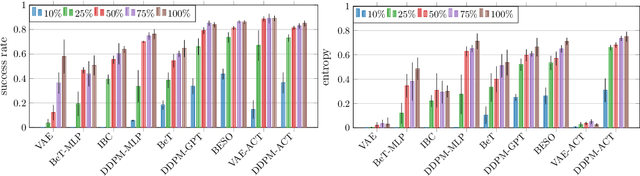
We propose a new policy representation based on score-based diffusion models (SDMs). We apply our new policy representation in the domain of Goal-Conditioned Imitation Learning (GCIL) to learn general-purpose goal-specified policies from large uncurated datasets without rewards. Our new goal-conditioned policy architecture "$\textbf{BE}$havior generation with $\textbf{S}$c$\textbf{O}$re-based Diffusion Policies" (BESO) leverages a generative, score-based diffusion model as its policy. BESO decouples the learning of the score model from the inference sampling process, and, hence allows for fast sampling strategies to generate goal-specified behavior in just 3 denoising steps, compared to 30+ steps of other diffusion based policies. Furthermore, BESO is highly expressive and can effectively capture multi-modality present in the solution space of the play data. Unlike previous methods such as Latent Plans or C-Bet, BESO does not rely on complex hierarchical policies or additional clustering for effective goal-conditioned behavior learning. Finally, we show how BESO can even be used to learn a goal-independent policy from play-data using classifier-free guidance. To the best of our knowledge this is the first work that a) represents a behavior policy based on such a decoupled SDM b) learns an SDM based policy in the domain of GCIL and c) provides a way to simultaneously learn a goal-dependent and a goal-independent policy from play-data. We evaluate BESO through detailed simulation and show that it consistently outperforms several state-of-the-art goal-conditioned imitation learning methods on challenging benchmarks. We additionally provide extensive ablation studies and experiments to demonstrate the effectiveness of our method for effective goal-conditioned behavior generation.
Information Maximizing Curriculum: A Curriculum-Based Approach for Training Mixtures of Experts
Mar 27, 2023
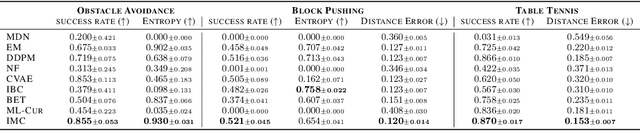
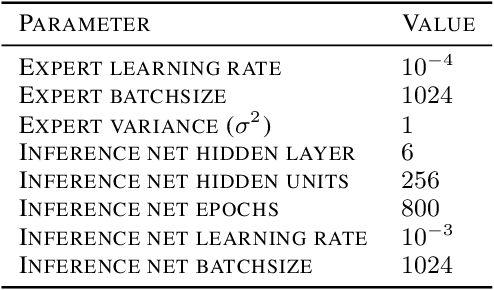
Mixtures of Experts (MoE) are known for their ability to learn complex conditional distributions with multiple modes. However, despite their potential, these models are challenging to train and often tend to produce poor performance, explaining their limited popularity. Our hypothesis is that this under-performance is a result of the commonly utilized maximum likelihood (ML) optimization, which leads to mode averaging and a higher likelihood of getting stuck in local maxima. We propose a novel curriculum-based approach to learning mixture models in which each component of the MoE is able to select its own subset of the training data for learning. This approach allows for independent optimization of each component, resulting in a more modular architecture that enables the addition and deletion of components on the fly, leading to an optimization less susceptible to local optima. The curricula can ignore data-points from modes not represented by the MoE, reducing the mode-averaging problem. To achieve a good data coverage, we couple the optimization of the curricula with a joint entropy objective and optimize a lower bound of this objective. We evaluate our curriculum-based approach on a variety of multimodal behavior learning tasks and demonstrate its superiority over competing methods for learning MoE models and conditional generative models.