 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEAST: Efficient Tokenization of B-Splines Encoded Action Sequences for Imitation Learning
Jun 06, 2025We present the B-spline Encoded Action Sequence Tokenizer (BEAST), a novel action tokenizer that encodes action sequences into compact discrete or continuous tokens using B-splines. In contrast to existing action tokenizers based on vector quantization or byte pair encoding, BEAST requires no separate tokenizer training and consistently produces tokens of uniform length, enabling fast action sequence generation via parallel decoding. Leveraging our B-spline formulation, BEAST inherently ensures generating smooth trajectories without discontinuities between adjacent segments. We extensively evaluate BEAST by integrating it with three distinct model architectures: a Variational Autoencoder (VAE) with continuous tokens, a decoder-only Transformer with discrete tokens, and Florence-2, a pretrained Vision-Language Model with an encoder-decoder architecture, demonstrating BEAST's compatibility and scalability with large pretrained models. We evaluate BEAST across three established benchmarks consisting of 166 simulated tasks and on three distinct robot settings with a total of 8 real-world tasks. Experimental results demonstrate that BEAST (i) significantly reduces both training and inference computational costs, and (ii) consistently generates smooth, high-frequency control signals suitable for continuous control tasks while (iii) reliably achieves competitive task success rates compared to state-of-the-art methods.
Interpretable Affordance Detection on 3D Point Clouds with Probabilistic Prototypes
Apr 25, 2025



Robotic agents need to understand how to interact with objects in their environment, both autonomously and during human-robot interactions. Affordance detection on 3D point clouds, which identifies object regions that allow specific interactions, has traditionally relied on deep learning models like PointNet++, DGCNN, or PointTransformerV3. However, these models operate as black boxes, offering no insight into their decision-making processes. Prototypical Learning methods, such as ProtoPNet, provide an interpretable alternative to black-box models by employing a "this looks like that" case-based reasoning approach. However, they have been primarily applied to image-based tasks. In this work, we apply prototypical learning to models for affordance detection on 3D point clouds. Experiments on the 3D-AffordanceNet benchmark dataset show that prototypical models achieve competitive performance with state-of-the-art black-box models and offer inherent interpretability. This makes prototypical models a promising candidate for human-robot interaction scenarios that require increased trust and safety.
Scaling Robot Policy Learning via Zero-Shot Labeling with Foundation Models
Oct 23, 2024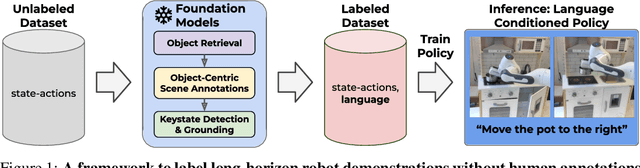
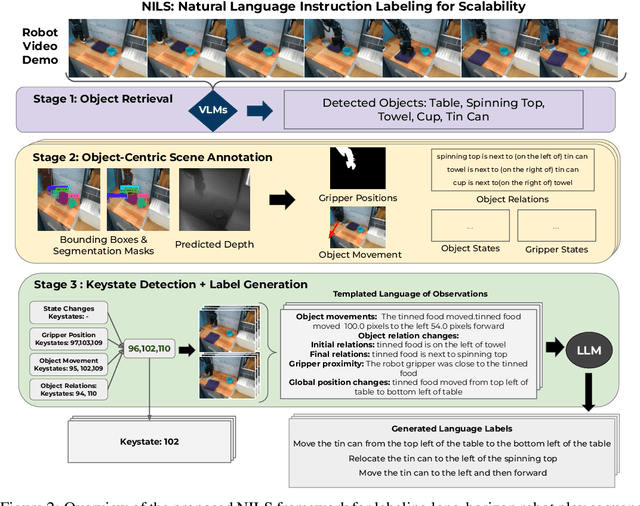
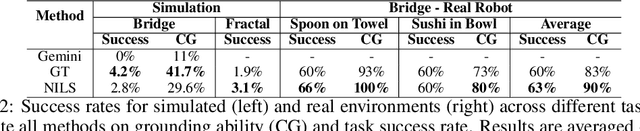

A central challenge towards developing robots that can relate human language to their perception and actions is the scarcity of natural language annotations in diverse robot datasets. Moreover, robot policies that follow natural language instructions are typically trained on either templated language or expensive human-labeled instructions, hindering their scalability. To this end, we introduce NILS: Natural language Instruction Labeling for Scalability. NILS automatically labels uncurated, long-horizon robot data at scale in a zero-shot manner without any human intervention. NILS combines pretrained vision-language foundation models in order to detect objects in a scene, detect object-centric changes, segment tasks from large datasets of unlabelled interaction data and ultimately label behavior datasets. Evaluations on BridgeV2, Fractal, and a kitchen play dataset show that NILS can autonomously annotate diverse robot demonstrations of unlabeled and unstructured datasets while alleviating several shortcomings of crowdsourced human annotations, such as low data quality and diversity. We use NILS to label over 115k trajectories obtained from over 430 hours of robot data. We open-source our auto-labeling code and generated annotations on our website: http://robottasklabeling.github.io.
HyperPg -- Prototypical Gaussians on the Hypersphere for Interpretable Deep Learning
Oct 11, 2024



Prototype Learning methods provide an interpretable alternative to black-box deep learning models. Approaches such as ProtoPNet learn, which part of a test image "look like" known prototypical parts from training images, combining predictive power with the inherent interpretability of case-based reasoning. However, existing approaches have two main drawbacks: A) They rely solely on deterministic similarity scores without statistical confidence. B) The prototypes are learned in a black-box manner without human input. This work introduces HyperPg, a new prototype representation leveraging Gaussian distributions on a hypersphere in latent space, with learnable mean and variance. HyperPg prototypes adapt to the spread of clusters in the latent space and output likelihood scores. The new architecture, HyperPgNet, leverages HyperPg to learn prototypes aligned with human concepts from pixel-level annotations. Consequently, each prototype represents a specific concept such as color, image texture, or part of the image subject. A concept extraction pipeline built on foundation models provides pixel-level annotations, significantly reducing human labeling effort. Experiments on CUB-200-2011 and Stanford Cars datasets demonstrate that HyperPgNet outperforms other prototype learning architectures while using fewer parameters and training steps. Additionally, the concept-aligned HyperPg prototypes are learned transparently, enhancing model interpretability.