 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCertifiable Alignment of GNSS and Local Frames via Lagrangian Duality
Dec 24, 2025Estimating the absolute orientation of a local system relative to a global navigation satellite system (GNSS) reference often suffers from local minima and high dependency on satellite availability. Existing methods for this alignment task rely on abundant satellites unavailable in GNSS-degraded environments, or use local optimization methods which cannot guarantee the optimality of a solution. This work introduces a globally optimal solver that transforms raw pseudo-range or Doppler measurements into a convexly relaxed problem. The proposed method is certifiable, meaning it can numerically verify the correctness of the result, filling a gap where existing local optimizers fail. We first formulate the original frame alignment problem as a nonconvex quadratically constrained quadratic program (QCQP) problem and relax the QCQP problem to a concave Lagrangian dual problem that provides a lower cost bound for the original problem. Then we perform relaxation tightness and observability analysis to derive criteria for certifiable optimality of the solution. Finally, simulation and real world experiments are conducted to evaluate the proposed method. The experiments show that our method provides certifiably optimal solutions even with only 2 satellites with Doppler measurements and 2D vehicle motion, while the traditional velocity-based VOBA method and the advanced GVINS alignment technique may fail or converge to local optima without notice. To support the development of GNSS-based navigation techniques in robotics, all code and data are open-sourced at https://github.com/Baoshan-Song/Certifiable-Doppler-alignment.
Two stage GNSS outlier detection for factor graph optimization based GNSS-RTK/INS/odometer fusion
Oct 01, 2025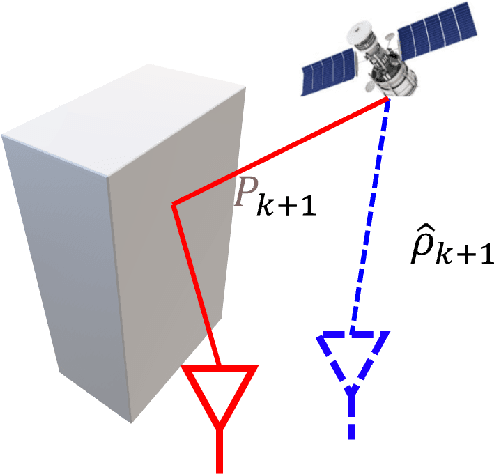
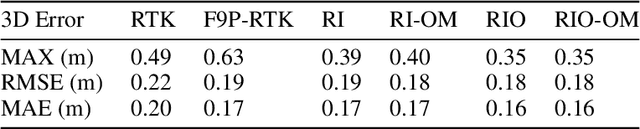
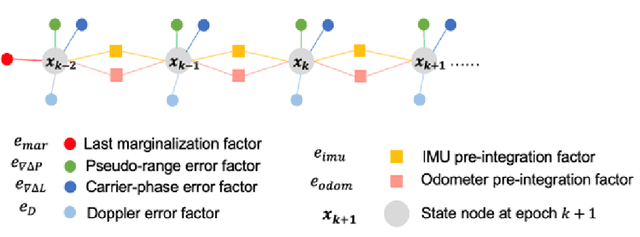
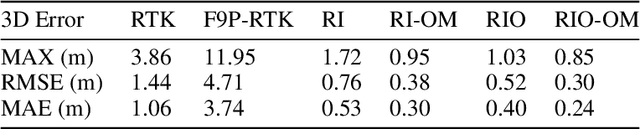
Reliable GNSS positioning in complex environments remains a critical challenge due to non-line-of-sight (NLOS) propagation, multipath effects, and frequent signal blockages. These effects can easily introduce large outliers into the raw pseudo-range measurements, which significantly degrade the performance of global navigation satellite system (GNSS) real-time kinematic (RTK) positioning and limit the effectiveness of tightly coupled GNSS-based integrated navigation system. To address this issue, we propose a two-stage outlier detection method and apply the method in a tightly coupled GNSS-RTK, inertial navigation system (INS), and odometer integration based on factor graph optimization (FGO). In the first stage, Doppler measurements are employed to detect pseudo-range outliers in a GNSS-only manner, since Doppler is less sensitive to multipath and NLOS effects compared with pseudo-range, making it a more stable reference for detecting sudden inconsistencies. In the second stage, pre-integrated inertial measurement units (IMU) and odometer constraints are used to generate predicted double-difference pseudo-range measurements, which enable a more refined identification and rejection of remaining outliers. By combining these two complementary stages, the system achieves improved robustness against both gross pseudo-range errors and degraded satellite measuring quality. The experimental results demonstrate that the two-stage detection framework significantly reduces the impact of pseudo-range outliers, and leads to improved positioning accuracy and consistency compared with representative baseline approaches. In the deep urban canyon test, the outlier mitigation method has limits the RMSE of GNSS-RTK/INS/odometer fusion from 0.52 m to 0.30 m, with 42.3% improvement.
Credible Uncertainty Quantification under Noise and System Model Mismatch
Sep 03, 2025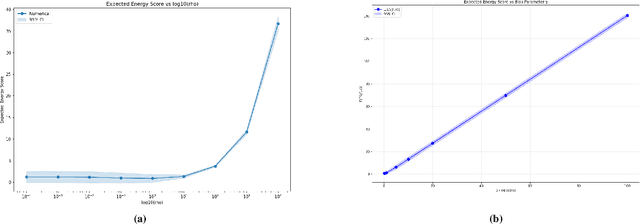


State estimators often provide self-assessed uncertainty metrics, such as covariance matrices, whose reliability is critical for downstream tasks. However, these self-assessments can be misleading due to underlying modeling violations like noise or system model mismatch. This letter addresses the problem of estimator credibility by introducing a unified, multi-metric evaluation framework. We construct a compact credibility portfolio that synergistically combines traditional metrics like the Normalized Estimation Error Squared (NEES) and the Noncredibility Index (NCI) with proper scoring rules, namely the Negative Log-Likelihood (NLL) and the Energy Score (ES). Our key contributions are a novel energy distance-based location test to robustly detect system model misspecification and a method that leverages the asymmetric sensitivities of NLL and ES to distinguish optimism covariance scaling from system bias. Monte Carlo simulations across six distinct credibility scenarios demonstrate that our proposed method achieves high classification accuracy (80-100%), drastically outperforming single-metric baselines which consistently fail to provide a complete and correct diagnosis. This framework provides a practical tool for turning patterns of credibility indicators into actionable diagnoses of model deficiencies.
Improving GNSS Positioning in Challenging Urban Areas by Digital Twin Database Correction
Aug 25, 2024



Accurate positioning technology is the foundation for industry and business applications. Although indoor and outdoor positioning techniques have been well studied separately, positioning performance in the intermediate period of changing the positioning environment is still challenging. This paper proposed a digital twin-aided positioning correction method for seamless positioning focusing on improving the receiver's outdoor positioning performance in urban areas, where the change of the positioning environment usually happens. The proposed algorithm will simulate the positioning solution for virtual receivers in a grid-based digital twin. Based on the simulated positioning solutions, a statistical model will be used to study the positioning characteristics and generate a correction information database for real receivers to improve their positioning performance. This algorithm has a low computation load on the receiver side and does not require a specially designed antenna, making it implementable for small-sized devices.
Exploring the Feasibility of Automated Data Standardization using Large Language Models for Seamless Positioning
Aug 22, 2024We propose a feasibility study for real-time automated data standardization leveraging Large Language Models (LLMs) to enhance seamless positioning systems in IoT environments. By integrating and standardizing heterogeneous sensor data from smartphones, IoT devices, and dedicated systems such as Ultra-Wideband (UWB), our study ensures data compatibility and improves positioning accuracy using the Extended Kalman Filter (EKF). The core components include the Intelligent Data Standardization Module (IDSM), which employs a fine-tuned LLM to convert varied sensor data into a standardized format, and the Transformation Rule Generation Module (TRGM), which automates the creation of transformation rules and scripts for ongoing data standardization. Evaluated in real-time environments, our study demonstrates adaptability and scalability, enhancing operational efficiency and accuracy in seamless navigation. This study underscores the potential of advanced LLMs in overcoming sensor data integration complexities, paving the way for more scalable and precise IoT navigation solutions.
Tightly Joined Positioning and Control Model for Unmanned Aerial Vehicles Based on Factor Graph Optimization
Apr 23, 2024The execution of flight missions by unmanned aerial vehicles (UAV) primarily relies on navigation. In particular, the navigation pipeline has traditionally been divided into positioning and control, operating in a sequential loop. However, the existing navigation pipeline, where the positioning and control are decoupled, struggles to adapt to ubiquitous uncertainties arising from measurement noise, abrupt disturbances, and nonlinear dynamics. As a result, the navigation reliability of the UAV is significantly challenged in complex dynamic areas. For example, the ubiquitous global navigation satellite system (GNSS) positioning can be degraded by the signal reflections from surrounding high-rising buildings in complex urban areas, leading to significantly increased positioning uncertainty. An additional challenge is introduced to the control algorithm due to the complex wind disturbances in urban canyons. Given the fact that the system positioning and control are highly correlated with each other, this research proposes a **tightly joined positioning and control model (JPCM) based on factor graph optimization (FGO)**. In particular, the proposed JPCM combines sensor measurements from positioning and control constraints into a unified probabilistic factor graph. Specifically, the positioning measurements are formulated as the factors in the factor graph. In addition, the model predictive control (MPC) is also formulated as the additional factors in the factor graph. By solving the factor graph contributed by both the positioning-related factors and the MPC-based factors, the complementariness of positioning and control can be deeply exploited. Finally, we validate the effectiveness and resilience of the proposed method using a simulated quadrotor system which shows significantly improved trajectory following performance.
ECMD: An Event-Centric Multisensory Driving Dataset for SLAM
Nov 04, 2023Leveraging multiple sensors enhances complex environmental perception and increases resilience to varying luminance conditions and high-speed motion patterns, achieving precise localization and mapping. This paper proposes, ECMD, an event-centric multisensory dataset containing 81 sequences and covering over 200 km of various challenging driving scenarios including high-speed motion, repetitive scenarios, dynamic objects, etc. ECMD provides data from two sets of stereo event cameras with different resolutions (640*480, 346*260), stereo industrial cameras, an infrared camera, a top-installed mechanical LiDAR with two slanted LiDARs, two consumer-level GNSS receivers, and an onboard IMU. Meanwhile, the ground-truth of the vehicle was obtained using a centimeter-level high-accuracy GNSS-RTK/INS navigation system. All sensors are well-calibrated and temporally synchronized at the hardware level, with recording data simultaneously. We additionally evaluate several state-of-the-art SLAM algorithms for benchmarking visual and LiDAR SLAM and identifying their limitations. The dataset is available at https://arclab-hku.github.io/ecmd/.
High-Accuracy Absolute-Position-Aided Code Phase Tracking Based on RTK/INS Deep Integration in Challenging Static Scenarios
Dec 31, 2022
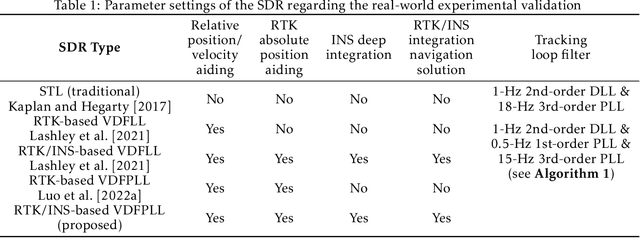
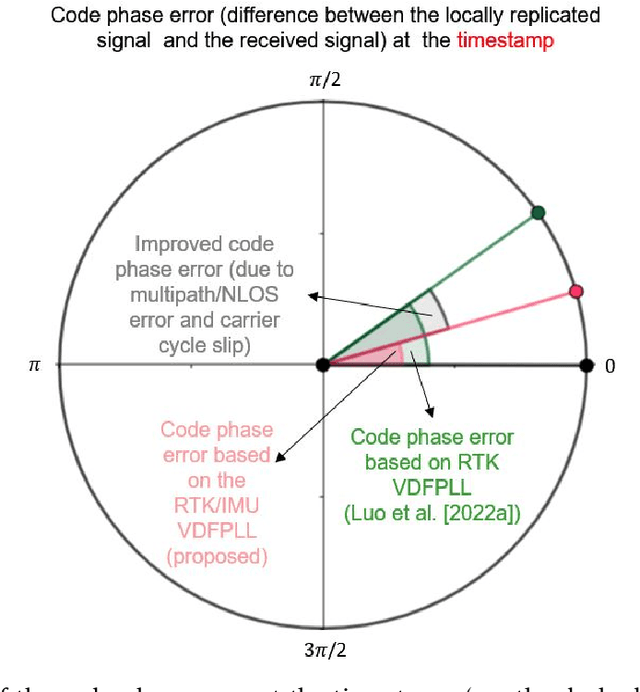
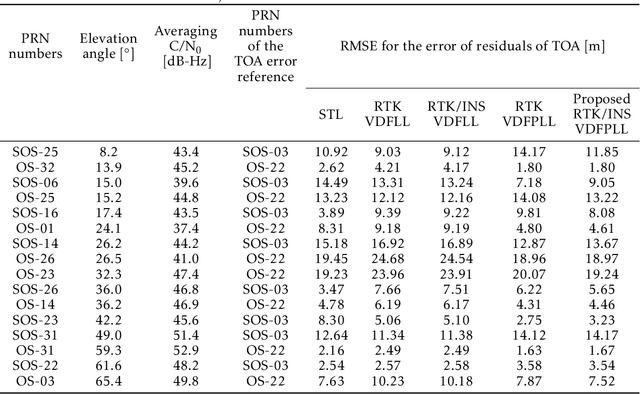
Many multi-sensor navigation systems urgently demand accurate positioning initialization from global navigation satellite systems (GNSSs) in challenging static scenarios. However, ground blockages against line-of-sight (LOS) signal reception make it difficult for GNSS users. Steering local codes in GNSS basebands is a desiring way to correct instantaneous signal phase misalignment, efficiently gathering useful signal power and increasing positioning accuracy. Besides, inertial navigation systems (INSs) have been used as a well-complementary dead reckoning (DR) sensor for GNSS receivers in kinematic scenarios resisting various interferences since early. But little work focuses on the case of whether the INS can improve GNSS receivers in static scenarios. Thus, this paper proposes an enhanced navigation system deeply integrated with low-cost INS solutions and GNSS high-accuracy carrier-based positioning. First, an absolute code phase is predicted from base station information, and integrated solution of the INS DR and real-time kinematic (RTK) results through an extended Kalman filter (EKF). Then, a numerically controlled oscillator (NCO) leverages the predicted code phase to improve the alignment between instantaneous local code phases and received ones. The proposed algorithm is realized in a vector-tracking GNSS software-defined radio (SDR). Real-world experiments demonstrate the proposed SDR regarding estimating time-of-arrival (TOA) and positioning accuracy.
Trajectory Smoothing Using GNSS/PDR Integration Via Factor Graph Optimization in Urban Canyons
Dec 29, 2022Accurate and smooth global navigation satellite system (GNSS) positioning for pedestrians in urban canyons is still a challenge due to the multipath effects and the non-light-of-sight (NLOS) receptions caused by the reflections from surrounding buildings. The recently developed factor graph optimization (FGO) based GNSS positioning method opened a new window for improving urban GNSS positioning by effectively exploiting the measurement redundancy from the historical information to resist the outlier measurements. Unfortunately, the FGO-based GNSS standalone positioning is still challenged in highly urbanized areas. As an extension of the previous FGO-based GNSS positioning method, this paper exploits the potential of the pedestrian dead reckoning (PDR) model in FGO to improve the GNSS standalone positioning performance in urban canyons. Specifically, the relative motion of the pedestrian is estimated based on the raw acceleration measurements from the onboard smartphone inertial measurement unit (IMU) via the PDR algorithm. Then the raw GNSS pseudorange, Doppler measurements, and relative motion from PDR are integrated using the FGO. Given the context of pedestrian navigation with a small acceleration most of the time, a novel soft motion model is proposed to smooth the states involved in the factor graph model. The effectiveness of the proposed method is verified step-by-step through two datasets collected in dense urban canyons of Hong Kong using smartphone-level GNSS receivers. The comparison between the conventional extended Kalman filter, several existing methods, and FGO-based integration is presented. The results reveal that the existing FGO-based GNSS standalone positioning is highly complementary to the PDR's relative motion estimation. Both improved positioning accuracy and trajectory smoothness are obtained with the help of the proposed method.
3D LiDAR Aided GNSS NLOS Mitigation for Reliable GNSS-RTK Positioning in Urban Canyons
Dec 11, 2022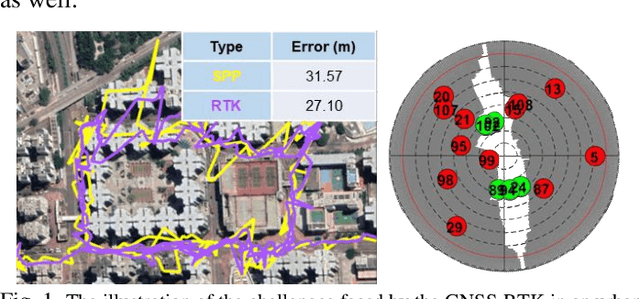
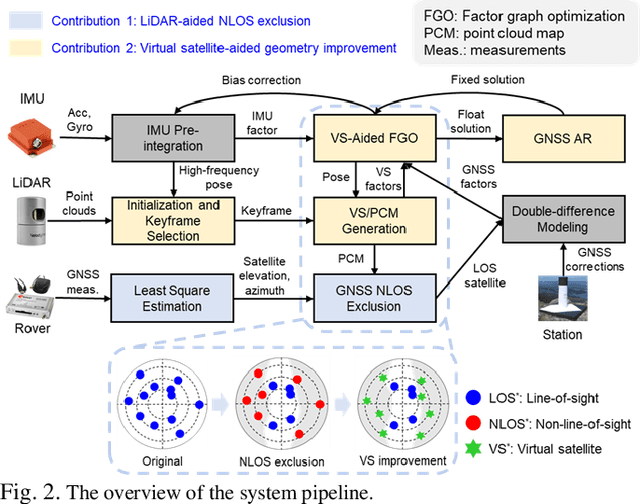
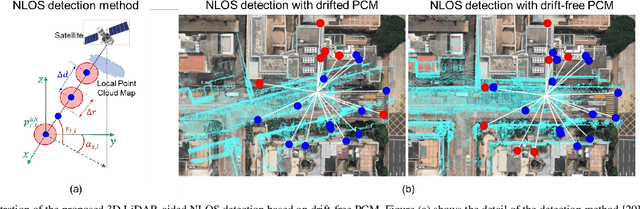
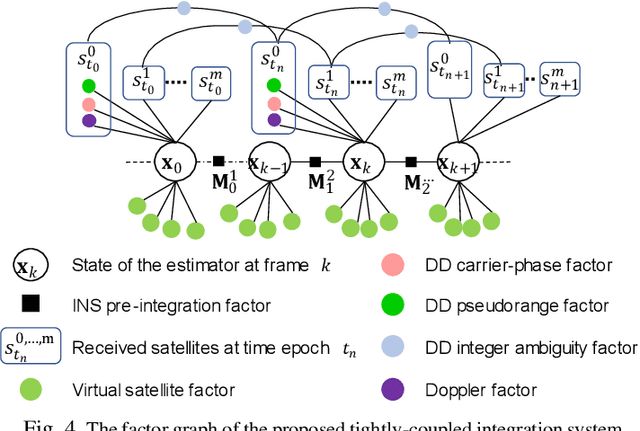
GNSS and LiDAR odometry are complementary as they provide absolute and relative positioning, respectively. Their integration in a loosely-coupled manner is straightforward but is challenged in urban canyons due to the GNSS signal reflections. Recent proposed 3D LiDAR-aided (3DLA) GNSS methods employ the point cloud map to identify the non-line-of-sight (NLOS) reception of GNSS signals. This facilitates the GNSS receiver to obtain improved urban positioning but not achieve a sub-meter level. GNSS real-time kinematics (RTK) uses carrier phase measurements to obtain decimeter-level positioning. In urban areas, the GNSS RTK is not only challenged by multipath and NLOS-affected measurement but also suffers from signal blockage by the building. The latter will impose a challenge in solving the ambiguity within the carrier phase measurements. In the other words, the model observability of the ambiguity resolution (AR) is greatly decreased. This paper proposes to generate virtual satellite (VS) measurements using the selected LiDAR landmarks from the accumulated 3D point cloud maps (PCM). These LiDAR-PCM-made VS measurements are tightly-coupled with GNSS pseudorange and carrier phase measurements. Thus, the VS measurements can provide complementary constraints, meaning providing low-elevation-angle measurements in the across-street directions. The implementation is done using factor graph optimization to solve an accurate float solution of the ambiguity before it is fed into LAMBDA. The effectiveness of the proposed method has been validated by the evaluation conducted on our recently open-sourced challenging dataset, UrbanNav. The result shows the fix rate of the proposed 3DLA GNSS RTK is about 30% while the conventional GNSS-RTK only achieves about 14%. In addition, the proposed method achieves sub-meter positioning accuracy in most of the data collected in challenging urban areas.