 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Minimal Solver for Relative Pose Estimation with Unknown Focal Length from Two Affine Correspondences
Dec 28, 2025In this paper, we aim to estimate the relative pose and focal length between two views with known intrinsic parameters except for an unknown focal length from two affine correspondences (ACs). Cameras are commonly used in combination with inertial measurement units (IMUs) in applications such as self-driving cars, smartphones, and unmanned aerial vehicles. The vertical direction of camera views can be obtained by IMU measurements. The relative pose between two cameras is reduced from 5DOF to 3DOF. We propose a new solver to estimate the 3DOF relative pose and focal length. First, we establish constraint equations from two affine correspondences when the vertical direction is known. Then, based on the properties of the equation system with nontrivial solutions, four equations can be derived. These four equations only involve two parameters: the focal length and the relative rotation angle. Finally, the polynomial eigenvalue method is utilized to solve the problem of focal length and relative rotation angle. The proposed solver is evaluated using synthetic and real-world datasets. The results show that our solver performs better than the existing state-of-the-art solvers.
Sky-GVIO: an enhanced GNSS/INS/Vision navigation with FCN-based sky-segmentation in urban canyon
Apr 17, 2024Accurate, continuous, and reliable positioning is a critical component of achieving autonomous driving. However, in complex urban canyon environments, the vulnerability of a stand-alone sensor and non-line-of-sight (NLOS) caused by high buildings, trees, and elevated structures seriously affect positioning results. To address these challenges, a sky-view images segmentation algorithm based on Fully Convolutional Network (FCN) is proposed for GNSS NLOS detection. Building upon this, a novel NLOS detection and mitigation algorithm (named S-NDM) is extended to the tightly coupled Global Navigation Satellite Systems (GNSS), Inertial Measurement Units (IMU), and visual feature system which is called Sky-GVIO, with the aim of achieving continuous and accurate positioning in urban canyon environments. Furthermore, the system harmonizes Single Point Positioning (SPP) with Real-Time Kinematic (RTK) methodologies to bolster its operational versatility and resilience. In urban canyon environments, the positioning performance of S-NDM algorithm proposed in this paper is evaluated under different tightly coupled SPP-related and RTK-related models. The results exhibit that Sky-GVIO system achieves meter-level accuracy under SPP mode and sub-decimeter precision with RTK, surpassing the performance of GNSS/INS/Vision frameworks devoid of S-NDM. Additionally, the sky-view image dataset, inclusive of training and evaluation subsets, has been made publicly accessible for scholarly exploration at https://github.com/whuwangjr/sky-view-images .
DynaVIG: Monocular Vision/INS/GNSS Integrated Navigation and Object Tracking for AGV in Dynamic Scenes
Nov 26, 2022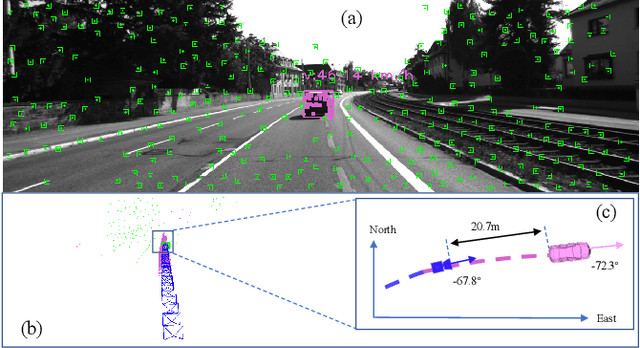
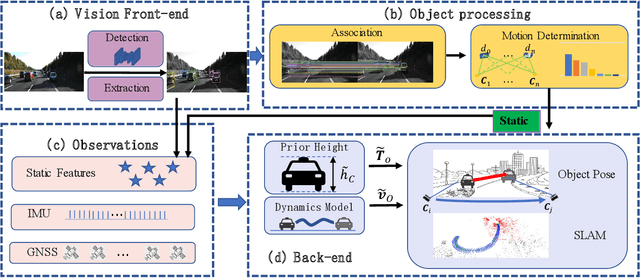
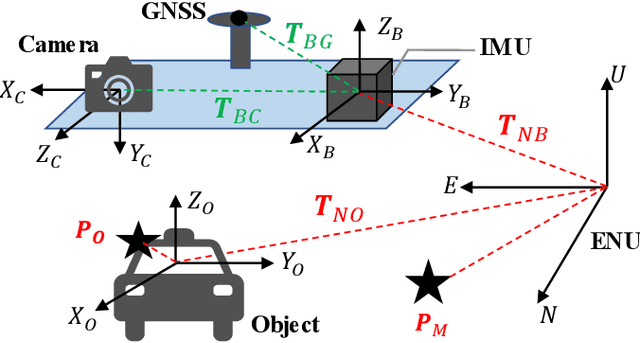
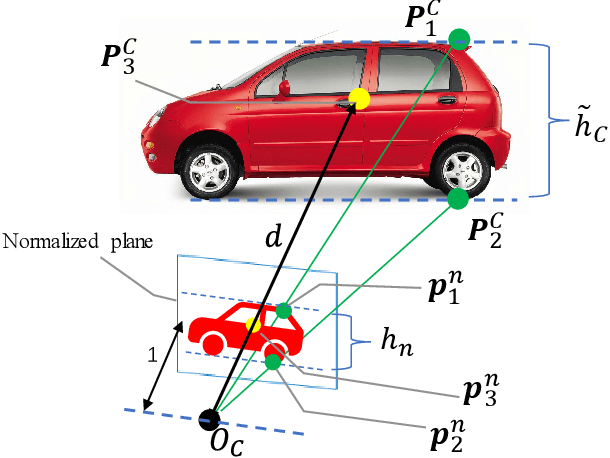
Visual-Inertial Odometry (VIO) usually suffers from drifting over long-time runs, the accuracy is easily affected by dynamic objects. We propose DynaVIG, a navigation and object tracking system based on the integration of Monocular Vision, Inertial Navigation System (INS), and Global Navigation Satellite System (GNSS). Our system aims to provide an accurate global estimation of the navigation states and object poses for the automated ground vehicle (AGV) in dynamic scenes. Due to the scale ambiguity of the object, a prior height model is proposed to initialize the object pose, and the scale is continuously estimated with the aid of GNSS and INS. To precisely track the object with complex moving, we establish an accurate dynamics model according to its motion state. Then the multi-sensor observations are optimized in a unified framework. Experiments on the KITTI dataset demonstrate that the multisensor fusion can effectively improve the accuracy of navigation and object tracking, compared to state-of-the-art methods. In addition, the proposed system achieves good estimation of the objects that change speed or direction.