 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSky-GVIO: an enhanced GNSS/INS/Vision navigation with FCN-based sky-segmentation in urban canyon
Apr 17, 2024Accurate, continuous, and reliable positioning is a critical component of achieving autonomous driving. However, in complex urban canyon environments, the vulnerability of a stand-alone sensor and non-line-of-sight (NLOS) caused by high buildings, trees, and elevated structures seriously affect positioning results. To address these challenges, a sky-view images segmentation algorithm based on Fully Convolutional Network (FCN) is proposed for GNSS NLOS detection. Building upon this, a novel NLOS detection and mitigation algorithm (named S-NDM) is extended to the tightly coupled Global Navigation Satellite Systems (GNSS), Inertial Measurement Units (IMU), and visual feature system which is called Sky-GVIO, with the aim of achieving continuous and accurate positioning in urban canyon environments. Furthermore, the system harmonizes Single Point Positioning (SPP) with Real-Time Kinematic (RTK) methodologies to bolster its operational versatility and resilience. In urban canyon environments, the positioning performance of S-NDM algorithm proposed in this paper is evaluated under different tightly coupled SPP-related and RTK-related models. The results exhibit that Sky-GVIO system achieves meter-level accuracy under SPP mode and sub-decimeter precision with RTK, surpassing the performance of GNSS/INS/Vision frameworks devoid of S-NDM. Additionally, the sky-view image dataset, inclusive of training and evaluation subsets, has been made publicly accessible for scholarly exploration at https://github.com/whuwangjr/sky-view-images .
Gradient and Projection Free Distributed Online Min-Max Resource Optimization
Dec 07, 2021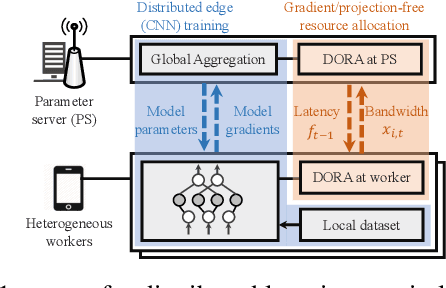
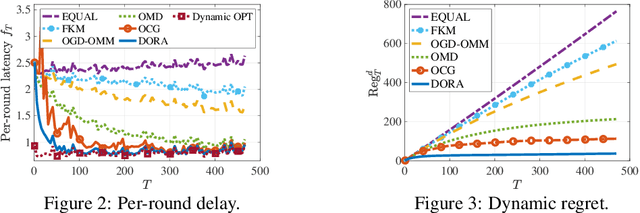
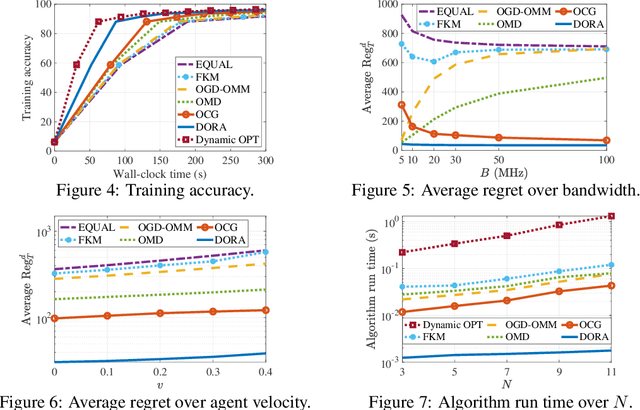
We consider distributed online min-max resource allocation with a set of parallel agents and a parameter server. Our goal is to minimize the pointwise maximum over a set of time-varying convex and decreasing cost functions, without a priori information about these functions. We propose a novel online algorithm, termed Distributed Online resource Re-Allocation (DORA), where non-stragglers learn to relinquish resource and share resource with stragglers. A notable feature of DORA is that it does not require gradient calculation or projection operation, unlike most existing online optimization strategies. This allows it to substantially reduce the computation overhead in large-scale and distributed networks. We show that the dynamic regret of the proposed algorithm is upper bounded by $O\left(T^{\frac{3}{4}}(1+P_T)^{\frac{1}{4}}\right)$, where $T$ is the total number of rounds and $P_T$ is the path-length of the instantaneous minimizers. We further consider an application to the bandwidth allocation problem in distributed online machine learning. Our numerical study demonstrates the efficacy of the proposed solution and its performance advantage over gradient- and/or projection-based resource allocation algorithms in reducing wall-clock time.