 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial-ground LiDAR place recognition with patch-level self-supervised learning and expanded reciprocal re-ranking
Jun 17, 2026LiDAR place recognition determines one's position on a prior point cloud map. The most studied ground-level LiDAR place recognition suffers from pre-visit requirements, incomplete coverage, and limited perspectives. Using pre-acquired, full-coverage Airborne Laser Scanning (ALS) data as an aerial prior map overcomes these drawbacks, making cross-view place recognition necessary and advantageous. However, aerial-ground LiDAR place recognition faces significant challenges, including the domain gap between aerial and ground point clouds, and false positives during initial retrieval. To address these challenges, we present a novel retrieval and re-ranking framework for aerial-ground LiDAR place recognition. Based on the priors that neighboring point cloud patches share similar semantics with anchor patch, our retrieval network introduces patch-level self-supervised learning modules at multiple scales and integrates with scene-level learning to improve global feature discriminativeness between aerial and ground point clouds. Furthermore, leveraging the structured spatial distribution of ALS point clouds, we introduce an Expanded Reciprocal (ER) re-ranking algorithm to exploit neighborhood information maximally and refine each feature based on neighbor features, which are then used to update the similarity matrix for final ranking. Extensive experiments demonstrate that our retrieval network outperforms existing state-of-the-art (SOTA) methods, achieving a 9.8\% improvement in average Recall@1 and a 3.2\% improvement in average Recall@1\% on the CS-Urban-Scenes, while also showing the best performance on the CS-Campus3D dataset. Additionally, our ER re-ranking algorithm further boosts the average Recall@1 by 4.9\% on CS-Campus3D and 10.2\% on CS-Urban-Scenes without additional training.
Aerial-ground Cross-modal Localization: Dataset, Ground-truth, and Benchmark
Sep 09, 2025Accurate visual localization in dense urban environments poses a fundamental task in photogrammetry, geospatial information science, and robotics. While imagery is a low-cost and widely accessible sensing modality, its effectiveness on visual odometry is often limited by textureless surfaces, severe viewpoint changes, and long-term drift. The growing public availability of airborne laser scanning (ALS) data opens new avenues for scalable and precise visual localization by leveraging ALS as a prior map. However, the potential of ALS-based localization remains underexplored due to three key limitations: (1) the lack of platform-diverse datasets, (2) the absence of reliable ground-truth generation methods applicable to large-scale urban environments, and (3) limited validation of existing Image-to-Point Cloud (I2P) algorithms under aerial-ground cross-platform settings. To overcome these challenges, we introduce a new large-scale dataset that integrates ground-level imagery from mobile mapping systems with ALS point clouds collected in Wuhan, Hong Kong, and San Francisco.
High-Accuracy Absolute-Position-Aided Code Phase Tracking Based on RTK/INS Deep Integration in Challenging Static Scenarios
Dec 31, 2022
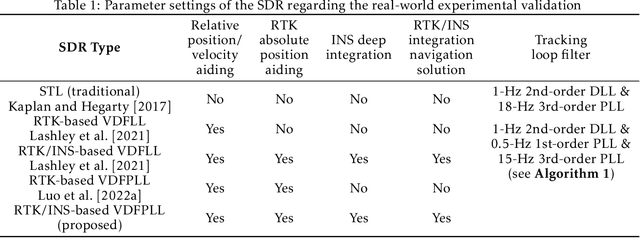
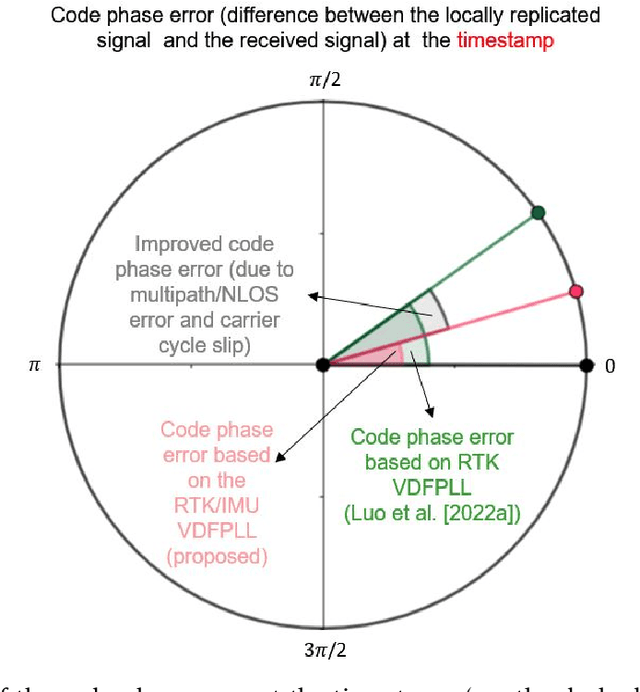
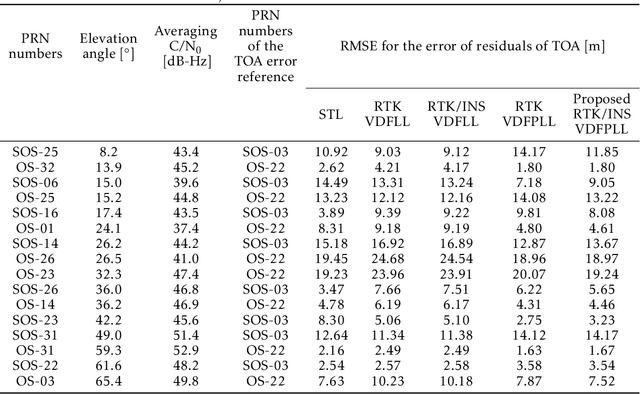
Many multi-sensor navigation systems urgently demand accurate positioning initialization from global navigation satellite systems (GNSSs) in challenging static scenarios. However, ground blockages against line-of-sight (LOS) signal reception make it difficult for GNSS users. Steering local codes in GNSS basebands is a desiring way to correct instantaneous signal phase misalignment, efficiently gathering useful signal power and increasing positioning accuracy. Besides, inertial navigation systems (INSs) have been used as a well-complementary dead reckoning (DR) sensor for GNSS receivers in kinematic scenarios resisting various interferences since early. But little work focuses on the case of whether the INS can improve GNSS receivers in static scenarios. Thus, this paper proposes an enhanced navigation system deeply integrated with low-cost INS solutions and GNSS high-accuracy carrier-based positioning. First, an absolute code phase is predicted from base station information, and integrated solution of the INS DR and real-time kinematic (RTK) results through an extended Kalman filter (EKF). Then, a numerically controlled oscillator (NCO) leverages the predicted code phase to improve the alignment between instantaneous local code phases and received ones. The proposed algorithm is realized in a vector-tracking GNSS software-defined radio (SDR). Real-world experiments demonstrate the proposed SDR regarding estimating time-of-arrival (TOA) and positioning accuracy.
Supporting GNSS Baseband Using Smartphone IMU and Ultra-Tight Integration
Nov 05, 2021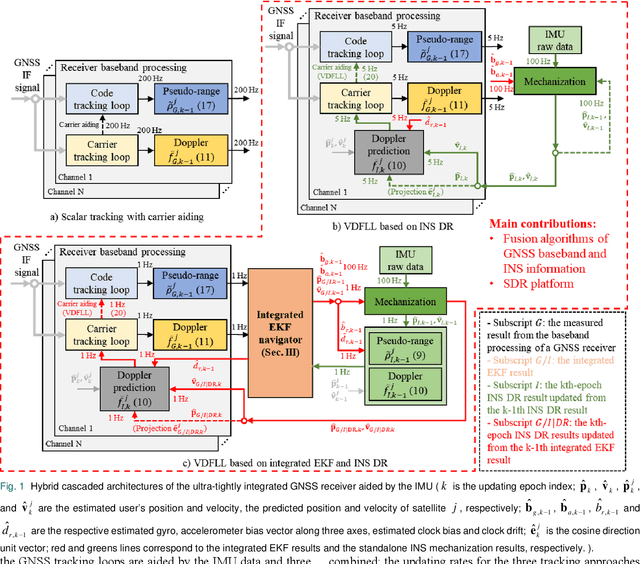
A great surge of the global navigation satellite system (GNSS) development excavates the potential of promoting pomposity in many state-of-art technologies, e.g., autonomous ground vehicles (AGVs). Nevertheless, the GNSS is fragile to the various ground interferences which significantly break down the continuity of the navigation system. Meanwhile, the GNSS-based next-generation navigation devices are being developed to be smaller, more low-cost, and lightweight as forecasted by the commercial market. This work aims to answer the question of whether the smartphone inertial measurement unit (IMU) is sufficient to support the GNSS baseband. Thus, a cascaded ultra-tightly integrated GNSS/inertial navigation system (INS) technique, where the consumer-level smartphone sensors are used, is proposed to improve the baseband performance of GNSS software-defined radios (SDRs). To integrate the GNSS baseband, a Doppler value is predicted based on an integrated extended Kalman filter (EKF) navigator where the pseudo-range-state-based measurements of GNSS and INS are fused, and it is used to assist the numerically controlled oscillator (NCO) algorithms. Then, an ultra-tight integration platform is built with an upgraded GNSS SDR of which baseband processing is integrated with the INS mechanization algorithm. Finally, by comparing with the previous algorithms, both tracking-level and carrier-based positioning performances are assessed in the proposed platform for the smartphone-IMU-aided GNSS baseband via kinematic AGV field tests. The experimental results demonstrate the performance of the tracking ability and the high-precision positioning of the proposed ultra-tight integration algorithms using the smartphone IMU.
Multi-Signal Approaches for Repeated Sampling Schemes in Inertial Sensor Calibration
May 17, 2021
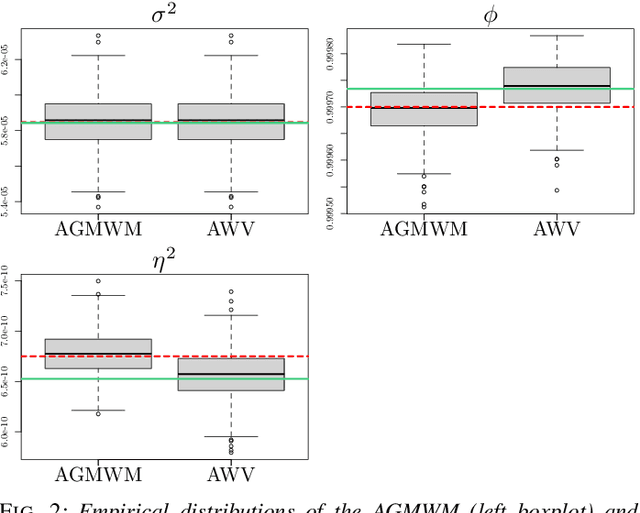
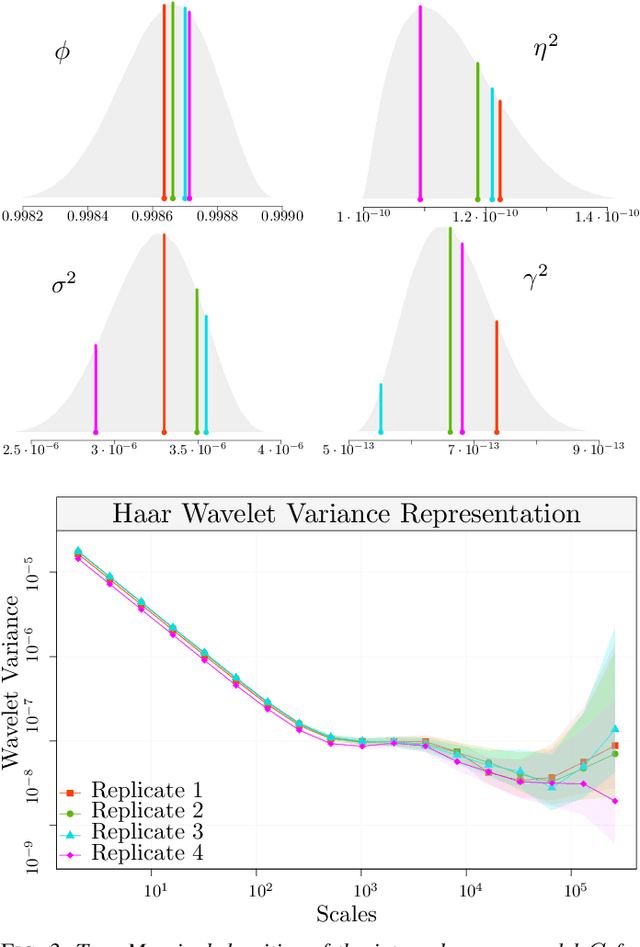
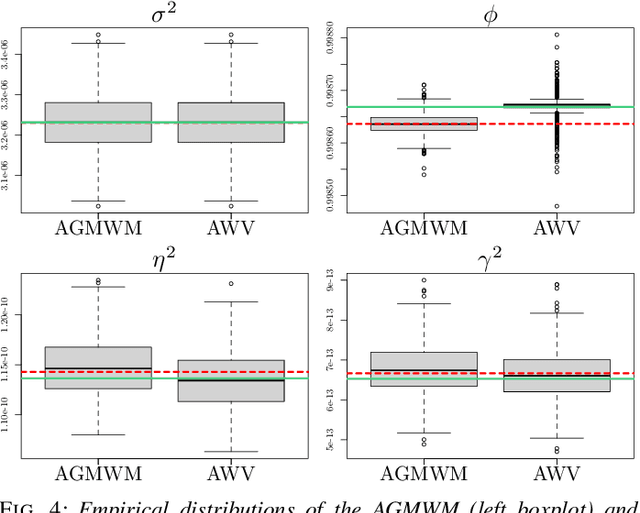
The task of inertial sensor calibration has become increasingly important due to the growing use of low-cost inertial measurement units which are however characterized by measurement errors. Being widely employed in a variety of mass-market applications, there is considerable focus on compensating for these errors by taking into account the deterministic and stochastic factors that characterize them. In this paper, we focus on the stochastic part of the error signal where it is customary to record the latter and use the observed error signal to identify and estimate the stochastic models, often complex in nature, that underlie this process. However, it is often the case that these error signals are observed through a series of replicates for the same inertial sensor and equally often that these replicates have the same model structure but their parameters appear different between replicates. This phenomenon has not been taken into account by current stochastic calibration procedures which therefore can be conditioned by flawed parameter estimation. For this reason, this paper aims at studying different approaches for this problem and studying their properties to take into account parameter variation between replicates thereby improving measurement precision and navigation uncertainty quantification in the long run.
Inertial Sensing Meets Artificial Intelligence: Opportunity or Challenge?
Jul 13, 2020
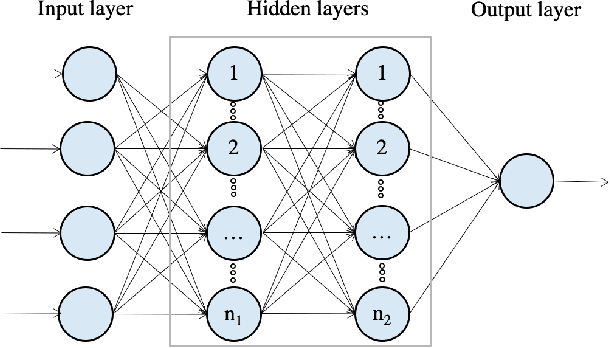
The inertial navigation system (INS) has been widely used to provide self-contained and continuous motion estimation in intelligent transportation systems. Recently, the emergence of chip-level inertial sensors has expanded the relevant applications from positioning, navigation, and mobile mapping to location-based services, unmanned systems, and transportation big data. Meanwhile, benefit from the emergence of big data and the improvement of algorithms and computing power, artificial intelligence (AI) has become a consensus tool that has been successfully applied in various fields. This article reviews the research on using AI technology to enhance inertial sensing from various aspects, including sensor design and selection, calibration and error modeling, navigation and motion-sensing algorithms, multi-sensor information fusion, system evaluation, and practical application. Based on the over 30 representative articles selected from the nearly 300 related publications, this article summarizes the state of the art, advantages, and challenges on each aspect. Finally, it summarizes nine advantages and nine challenges of AI-enhanced inertial sensing and then points out future research directions.
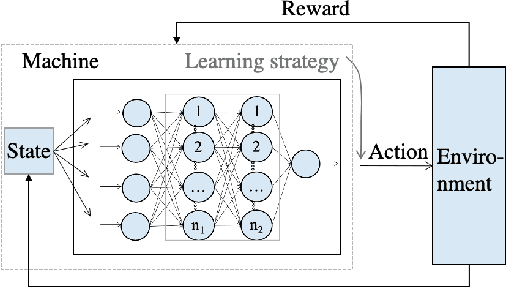
Deep Reinforcement Learning (DRL): Another Perspective for Unsupervised Wireless Localization
Apr 09, 2020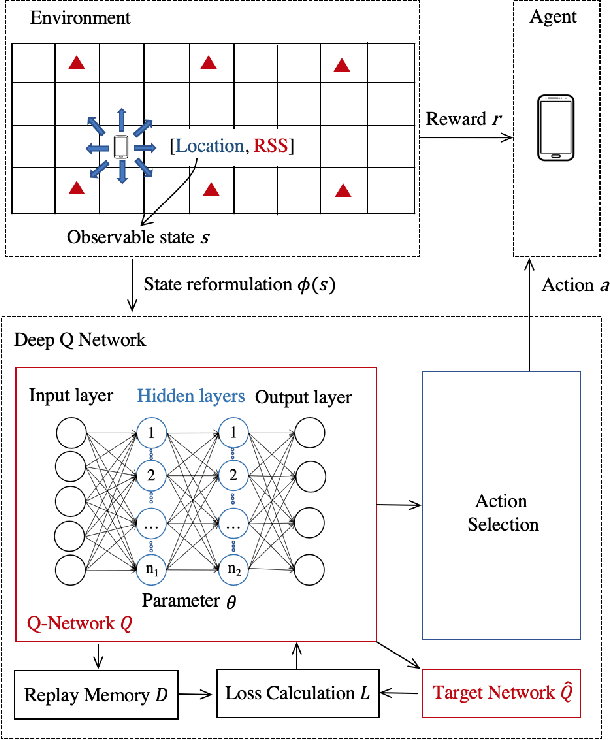
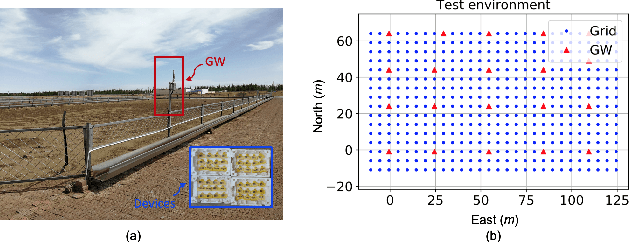
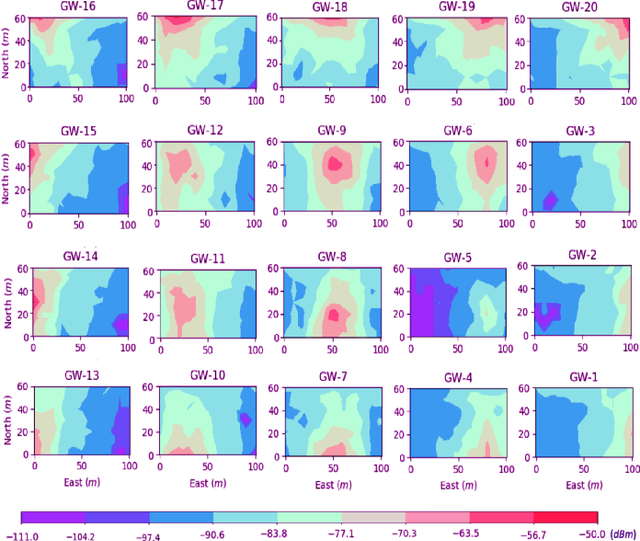
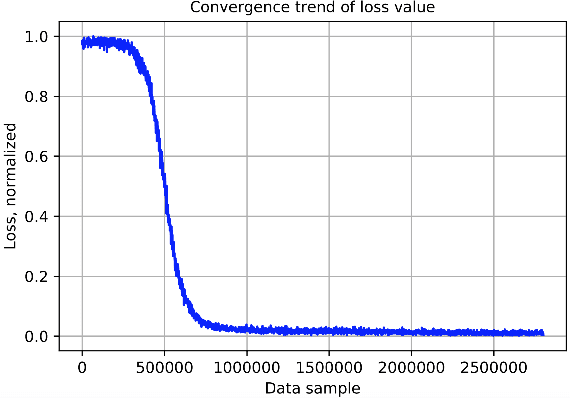
Location is key to spatialize internet-of-things (IoT) data. However, it is challenging to use low-cost IoT devices for robust unsupervised localization (i.e., localization without training data that have known location labels). Thus, this paper proposes a deep reinforcement learning (DRL) based unsupervised wireless-localization method. The main contributions are as follows. (1) This paper proposes an approach to model a continuous wireless-localization process as a Markov decision process (MDP) and process it within a DRL framework. (2) To alleviate the challenge of obtaining rewards when using unlabeled data (e.g., daily-life crowdsourced data), this paper presents a reward-setting mechanism, which extracts robust landmark data from unlabeled wireless received signal strengths (RSS). (3) To ease requirements for model re-training when using DRL for localization, this paper uses RSS measurements together with agent location to construct DRL inputs. The proposed method was tested by using field testing data from multiple Bluetooth 5 smart ear tags in a pasture. Meanwhile, the experimental verification process reflected the advantages and challenges for using DRL in wireless localization.