 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInertial Sensing Meets Artificial Intelligence: Opportunity or Challenge?
Jul 13, 2020
The inertial navigation system (INS) has been widely used to provide self-contained and continuous motion estimation in intelligent transportation systems. Recently, the emergence of chip-level inertial sensors has expanded the relevant applications from positioning, navigation, and mobile mapping to location-based services, unmanned systems, and transportation big data. Meanwhile, benefit from the emergence of big data and the improvement of algorithms and computing power, artificial intelligence (AI) has become a consensus tool that has been successfully applied in various fields. This article reviews the research on using AI technology to enhance inertial sensing from various aspects, including sensor design and selection, calibration and error modeling, navigation and motion-sensing algorithms, multi-sensor information fusion, system evaluation, and practical application. Based on the over 30 representative articles selected from the nearly 300 related publications, this article summarizes the state of the art, advantages, and challenges on each aspect. Finally, it summarizes nine advantages and nine challenges of AI-enhanced inertial sensing and then points out future research directions.
Deep Reinforcement Learning (DRL): Another Perspective for Unsupervised Wireless Localization
Apr 09, 2020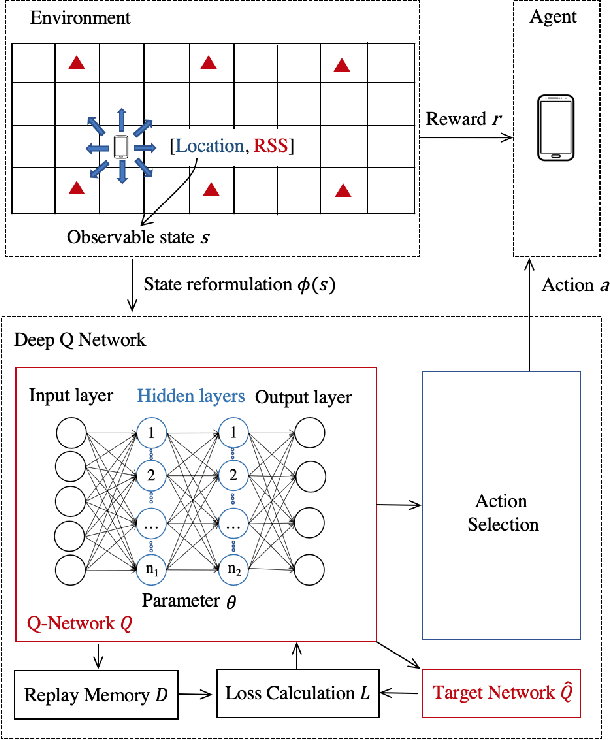
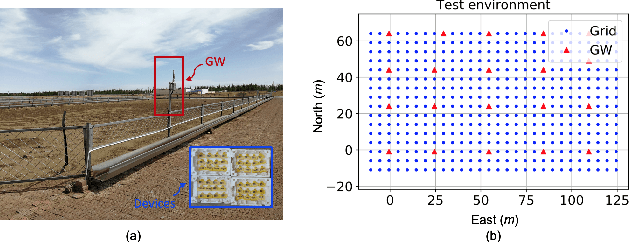
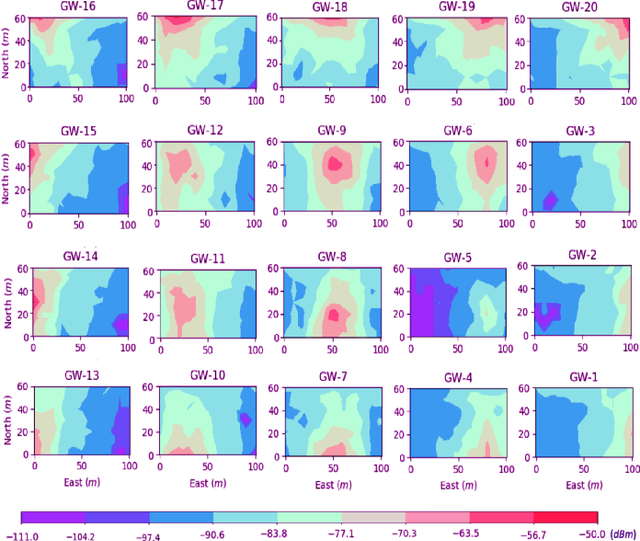
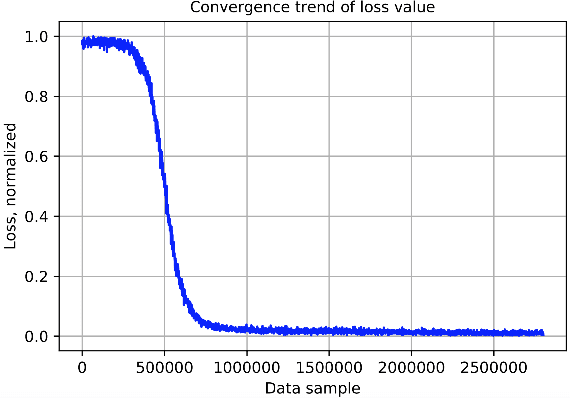
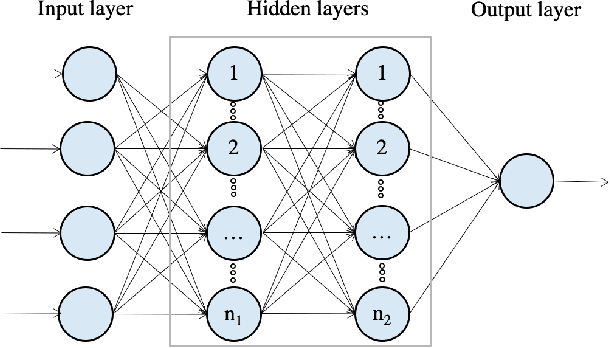
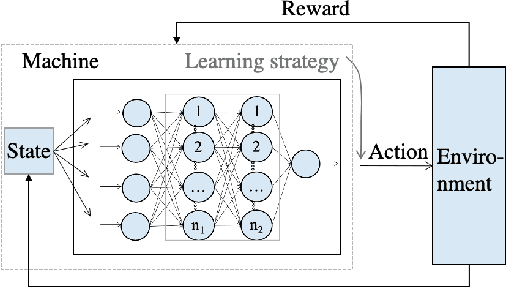
Location is key to spatialize internet-of-things (IoT) data. However, it is challenging to use low-cost IoT devices for robust unsupervised localization (i.e., localization without training data that have known location labels). Thus, this paper proposes a deep reinforcement learning (DRL) based unsupervised wireless-localization method. The main contributions are as follows. (1) This paper proposes an approach to model a continuous wireless-localization process as a Markov decision process (MDP) and process it within a DRL framework. (2) To alleviate the challenge of obtaining rewards when using unlabeled data (e.g., daily-life crowdsourced data), this paper presents a reward-setting mechanism, which extracts robust landmark data from unlabeled wireless received signal strengths (RSS). (3) To ease requirements for model re-training when using DRL for localization, this paper uses RSS measurements together with agent location to construct DRL inputs. The proposed method was tested by using field testing data from multiple Bluetooth 5 smart ear tags in a pasture. Meanwhile, the experimental verification process reflected the advantages and challenges for using DRL in wireless localization.