 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupporting GNSS Baseband Using Smartphone IMU and Ultra-Tight Integration
Paper and Code
Nov 05, 2021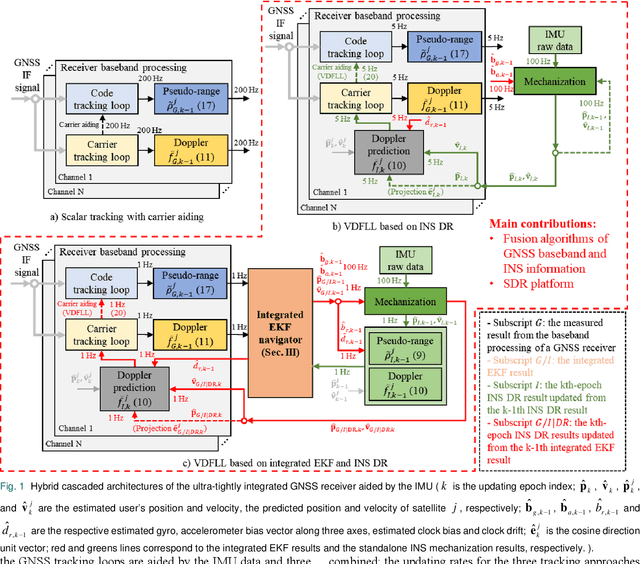
A great surge of the global navigation satellite system (GNSS) development excavates the potential of promoting pomposity in many state-of-art technologies, e.g., autonomous ground vehicles (AGVs). Nevertheless, the GNSS is fragile to the various ground interferences which significantly break down the continuity of the navigation system. Meanwhile, the GNSS-based next-generation navigation devices are being developed to be smaller, more low-cost, and lightweight as forecasted by the commercial market. This work aims to answer the question of whether the smartphone inertial measurement unit (IMU) is sufficient to support the GNSS baseband. Thus, a cascaded ultra-tightly integrated GNSS/inertial navigation system (INS) technique, where the consumer-level smartphone sensors are used, is proposed to improve the baseband performance of GNSS software-defined radios (SDRs). To integrate the GNSS baseband, a Doppler value is predicted based on an integrated extended Kalman filter (EKF) navigator where the pseudo-range-state-based measurements of GNSS and INS are fused, and it is used to assist the numerically controlled oscillator (NCO) algorithms. Then, an ultra-tight integration platform is built with an upgraded GNSS SDR of which baseband processing is integrated with the INS mechanization algorithm. Finally, by comparing with the previous algorithms, both tracking-level and carrier-based positioning performances are assessed in the proposed platform for the smartphone-IMU-aided GNSS baseband via kinematic AGV field tests. The experimental results demonstrate the performance of the tracking ability and the high-precision positioning of the proposed ultra-tight integration algorithms using the smartphone IMU.