 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafer Trajectory Planning with CBF-guided Diffusion Model for Unmanned Aerial Vehicles
Apr 19, 2026Safe and agile trajectory planning is essential for autonomous systems, especially during complex aerobatic maneuvers. Motivated by the recent success of diffusion models in generative tasks, this paper introduces AeroTrajGen, a novel framework for diffusion-based trajectory generation that incorporates control barrier function (CBF)-guided sampling during inference, specifically designed for unmanned aerial vehicles (UAVs). The proposed CBF-guided sampling addresses two critical challenges: (1) mitigating the inherent unpredictability and potential safety violations of diffusion models, and (2) reducing reliance on extensively safety-verified training data. During the reverse diffusion process, CBF-based guidance ensures collision-free trajectories by seamlessly integrating safety constraint gradients with the diffusion model's score function. The model features an obstacle-aware diffusion transformer architecture with multi-modal conditioning, including trajectory history, obstacles, maneuver styles, and goal, enabling the generation of smooth, highly agile trajectories across 14 distinct aerobatic maneuvers. Trained on a dataset of 2,000 expert demonstrations, AeroTrajGen is rigorously evaluated in simulation under multi-obstacle environments. Simulation results demonstrate that CBF-guided sampling reduces collision rates by 94.7% compared to unguided diffusion baselines, while preserving trajectory agility and diversity. Our code is open-sourced at https://github.com/RoboticsPolyu/CBF-DMP.
UrbanV2X: A Multisensory Vehicle-Infrastructure Dataset for Cooperative Navigation in Urban Areas
Dec 23, 2025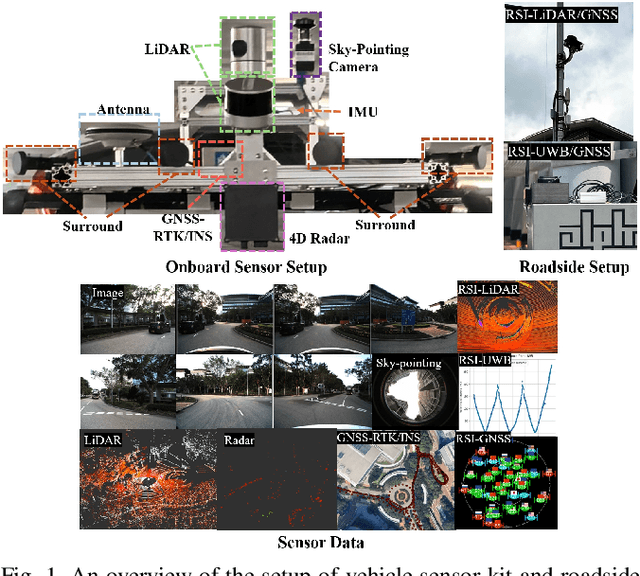
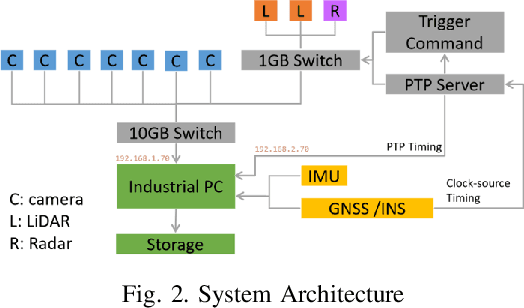

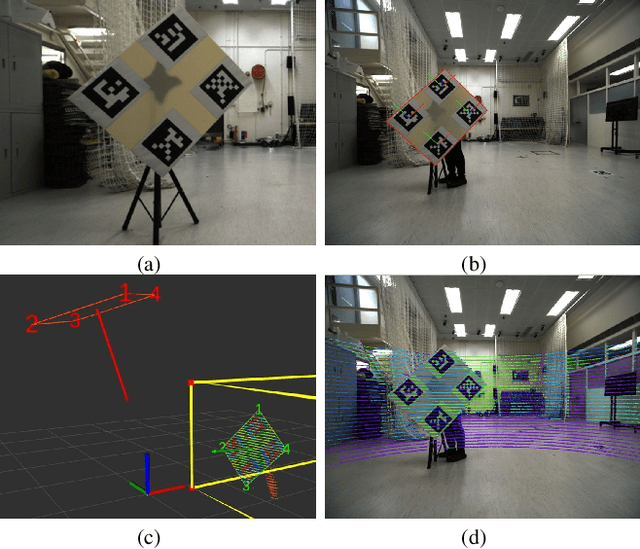
Due to the limitations of a single autonomous vehicle, Cellular Vehicle-to-Everything (C-V2X) technology opens a new window for achieving fully autonomous driving through sensor information sharing. However, real-world datasets supporting vehicle-infrastructure cooperative navigation in complex urban environments remain rare. To address this gap, we present UrbanV2X, a comprehensive multisensory dataset collected from vehicles and roadside infrastructure in the Hong Kong C-V2X testbed, designed to support research on smart mobility applications in dense urban areas. Our onboard platform provides synchronized data from multiple industrial cameras, LiDARs, 4D radar, ultra-wideband (UWB), IMU, and high-precision GNSS-RTK/INS navigation systems. Meanwhile, our roadside infrastructure provides LiDAR, GNSS, and UWB measurements. The entire vehicle-infrastructure platform is synchronized using the Precision Time Protocol (PTP), with sensor calibration data provided. We also benchmark various navigation algorithms to evaluate the collected cooperative data. The dataset is publicly available at https://polyu-taslab.github.io/UrbanV2X/.
Integrated Planning and Control on Manifolds: Factor Graph Representation and Toolkit
Oct 05, 2025Model predictive control (MPC) faces significant limitations when applied to systems evolving on nonlinear manifolds, such as robotic attitude dynamics and constrained motion planning, where traditional Euclidean formulations struggle with singularities, over-parameterization, and poor convergence. To overcome these challenges, this paper introduces FactorMPC, a factor-graph based MPC toolkit that unifies system dynamics, constraints, and objectives into a modular, user-friendly, and efficient optimization structure. Our approach natively supports manifold-valued states with Gaussian uncertainties modeled in tangent spaces. By exploiting the sparsity and probabilistic structure of factor graphs, the toolkit achieves real-time performance even for high-dimensional systems with complex constraints. The velocity-extended on-manifold control barrier function (CBF)-based obstacle avoidance factors are designed for safety-critical applications. By bridging graphical models with safety-critical MPC, our work offers a scalable and geometrically consistent framework for integrated planning and control. The simulations and experimental results on the quadrotor demonstrate superior trajectory tracking and obstacle avoidance performance compared to baseline methods. To foster research reproducibility, we have provided open-source implementation offering plug-and-play factors.
Two stage GNSS outlier detection for factor graph optimization based GNSS-RTK/INS/odometer fusion
Oct 01, 2025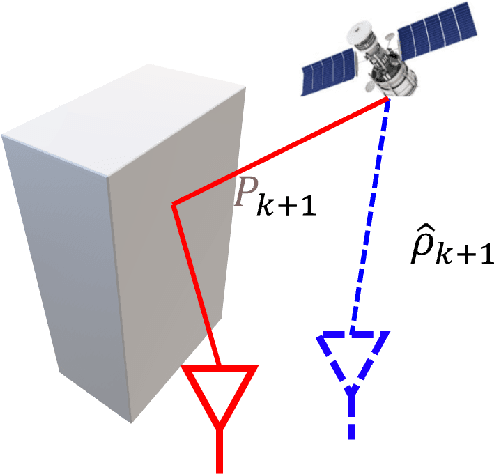
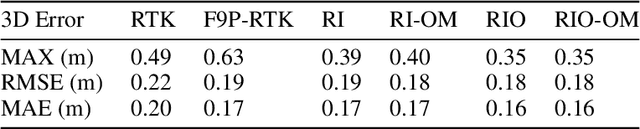
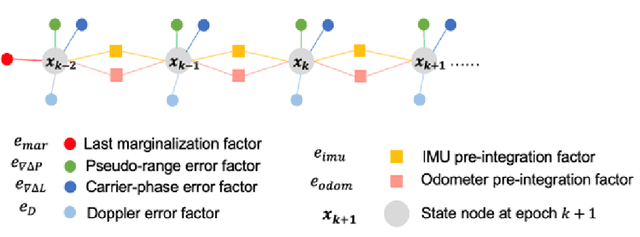
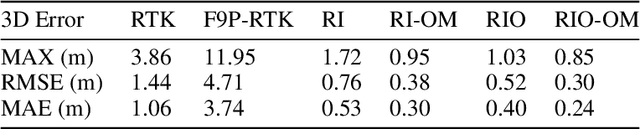
Reliable GNSS positioning in complex environments remains a critical challenge due to non-line-of-sight (NLOS) propagation, multipath effects, and frequent signal blockages. These effects can easily introduce large outliers into the raw pseudo-range measurements, which significantly degrade the performance of global navigation satellite system (GNSS) real-time kinematic (RTK) positioning and limit the effectiveness of tightly coupled GNSS-based integrated navigation system. To address this issue, we propose a two-stage outlier detection method and apply the method in a tightly coupled GNSS-RTK, inertial navigation system (INS), and odometer integration based on factor graph optimization (FGO). In the first stage, Doppler measurements are employed to detect pseudo-range outliers in a GNSS-only manner, since Doppler is less sensitive to multipath and NLOS effects compared with pseudo-range, making it a more stable reference for detecting sudden inconsistencies. In the second stage, pre-integrated inertial measurement units (IMU) and odometer constraints are used to generate predicted double-difference pseudo-range measurements, which enable a more refined identification and rejection of remaining outliers. By combining these two complementary stages, the system achieves improved robustness against both gross pseudo-range errors and degraded satellite measuring quality. The experimental results demonstrate that the two-stage detection framework significantly reduces the impact of pseudo-range outliers, and leads to improved positioning accuracy and consistency compared with representative baseline approaches. In the deep urban canyon test, the outlier mitigation method has limits the RMSE of GNSS-RTK/INS/odometer fusion from 0.52 m to 0.30 m, with 42.3% improvement.
Tightly Joined Positioning and Control Model for Unmanned Aerial Vehicles Based on Factor Graph Optimization
Apr 23, 2024The execution of flight missions by unmanned aerial vehicles (UAV) primarily relies on navigation. In particular, the navigation pipeline has traditionally been divided into positioning and control, operating in a sequential loop. However, the existing navigation pipeline, where the positioning and control are decoupled, struggles to adapt to ubiquitous uncertainties arising from measurement noise, abrupt disturbances, and nonlinear dynamics. As a result, the navigation reliability of the UAV is significantly challenged in complex dynamic areas. For example, the ubiquitous global navigation satellite system (GNSS) positioning can be degraded by the signal reflections from surrounding high-rising buildings in complex urban areas, leading to significantly increased positioning uncertainty. An additional challenge is introduced to the control algorithm due to the complex wind disturbances in urban canyons. Given the fact that the system positioning and control are highly correlated with each other, this research proposes a **tightly joined positioning and control model (JPCM) based on factor graph optimization (FGO)**. In particular, the proposed JPCM combines sensor measurements from positioning and control constraints into a unified probabilistic factor graph. Specifically, the positioning measurements are formulated as the factors in the factor graph. In addition, the model predictive control (MPC) is also formulated as the additional factors in the factor graph. By solving the factor graph contributed by both the positioning-related factors and the MPC-based factors, the complementariness of positioning and control can be deeply exploited. Finally, we validate the effectiveness and resilience of the proposed method using a simulated quadrotor system which shows significantly improved trajectory following performance.
RELEAD: Resilient Localization with Enhanced LiDAR Odometry in Adverse Environments
Mar 15, 2024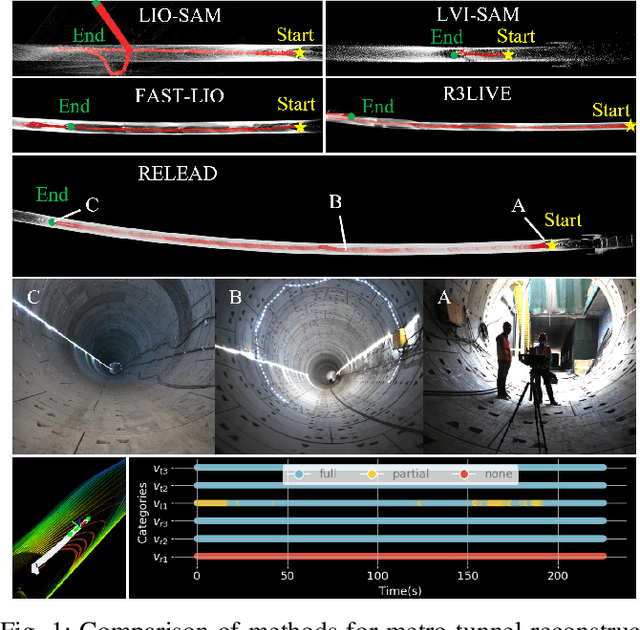
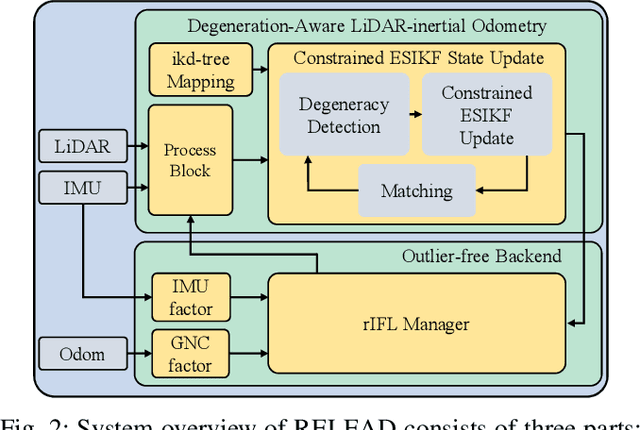
LiDAR-based localization is valuable for applications like mining surveys and underground facility maintenance. However, existing methods can struggle when dealing with uninformative geometric structures in challenging scenarios. This paper presents RELEAD, a LiDAR-centric solution designed to address scan-matching degradation. Our method enables degeneracy-free point cloud registration by solving constrained ESIKF updates in the front end and incorporates multisensor constraints, even when dealing with outlier measurements, through graph optimization based on Graduated Non-Convexity (GNC). Additionally, we propose a robust Incremental Fixed Lag Smoother (rIFL) for efficient GNC-based optimization. RELEAD has undergone extensive evaluation in degenerate scenarios and has outperformed existing state-of-the-art LiDAR-Inertial odometry and LiDAR-Visual-Inertial odometry methods.
CoLRIO: LiDAR-Ranging-Inertial Centralized State Estimation for Robotic Swarms
Feb 23, 2024
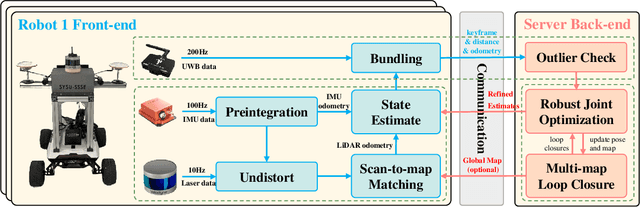
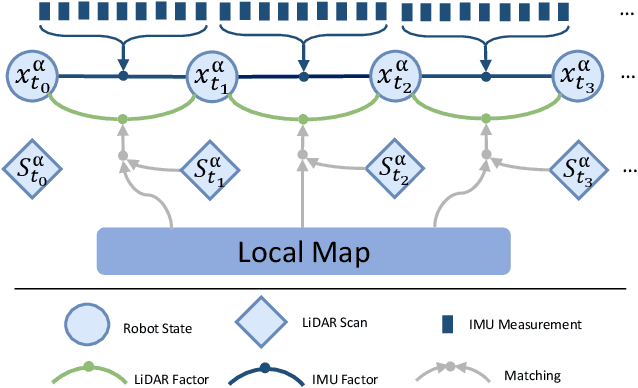
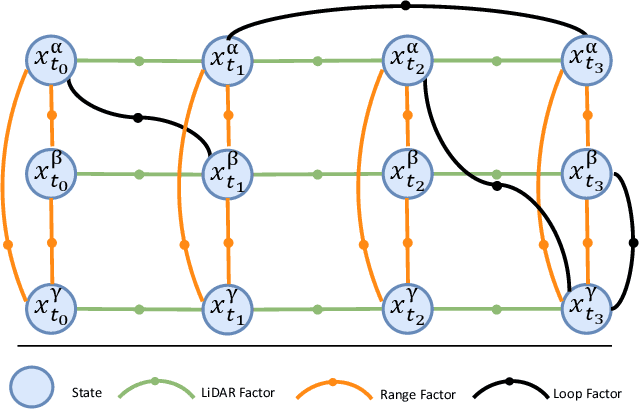
Collaborative state estimation using different heterogeneous sensors is a fundamental prerequisite for robotic swarms operating in GPS-denied environments, posing a significant research challenge. In this paper, we introduce a centralized system to facilitate collaborative LiDAR-ranging-inertial state estimation, enabling robotic swarms to operate without the need for anchor deployment. The system efficiently distributes computationally intensive tasks to a central server, thereby reducing the computational burden on individual robots for local odometry calculations. The server back-end establishes a global reference by leveraging shared data and refining joint pose graph optimization through place recognition, global optimization techniques, and removal of outlier data to ensure precise and robust collaborative state estimation. Extensive evaluations of our system, utilizing both publicly available datasets and our custom datasets, demonstrate significant enhancements in the accuracy of collaborative SLAM estimates. Moreover, our system exhibits remarkable proficiency in large-scale missions, seamlessly enabling ten robots to collaborate effectively in performing SLAM tasks. In order to contribute to the research community, we will make our code open-source and accessible at \url{https://github.com/PengYu-team/Co-LRIO}.
ECMD: An Event-Centric Multisensory Driving Dataset for SLAM
Nov 04, 2023Leveraging multiple sensors enhances complex environmental perception and increases resilience to varying luminance conditions and high-speed motion patterns, achieving precise localization and mapping. This paper proposes, ECMD, an event-centric multisensory dataset containing 81 sequences and covering over 200 km of various challenging driving scenarios including high-speed motion, repetitive scenarios, dynamic objects, etc. ECMD provides data from two sets of stereo event cameras with different resolutions (640*480, 346*260), stereo industrial cameras, an infrared camera, a top-installed mechanical LiDAR with two slanted LiDARs, two consumer-level GNSS receivers, and an onboard IMU. Meanwhile, the ground-truth of the vehicle was obtained using a centimeter-level high-accuracy GNSS-RTK/INS navigation system. All sensors are well-calibrated and temporally synchronized at the hardware level, with recording data simultaneously. We additionally evaluate several state-of-the-art SLAM algorithms for benchmarking visual and LiDAR SLAM and identifying their limitations. The dataset is available at https://arclab-hku.github.io/ecmd/.
Tightly Joining Positioning and Control for Trustworthy Unmanned Aerial Vehicles Based on Factor Graph Optimization in Urban Transportation
Oct 04, 2023Unmanned aerial vehicles (UAV) showed great potential in improving the efficiency of parcel delivery applications in the coming smart cities era. Unfortunately, the trustworthy positioning and control algorithms of the UAV are significantly challenged in complex urban areas. For example, the ubiquitous global navigation satellite system (GNSS) positioning can be degraded by the signal reflections from surrounding high-rising buildings, leading to significantly increased positioning uncertainty. An additional challenge is introduced to the control algorithm due to the complex wind disturbances in urban canyons. Given the fact that the system positioning and control are highly correlated with each other, for example, the system dynamics of the control can largely help with the positioning, this paper proposed a joint positioning and control method (JPCM) based on factor graph optimization (FGO), which combines sensors' measurements and control intention. In particular, the positioning measurements are formulated as the factors in the factor graph model, such as the positioning from the GNSS. The model predictive control (MPC) is also formulated as the additional factors in the factor graph model. By solving the factor graph contributed by both the positioning factor and the MPC-based factors, the complementariness of positioning and control can be fully explored. To guarantee reliable system dynamic parameters, we validate the effectiveness of the proposed method using a simulated quadrotor system which showed significantly improved trajectory following performance. To benefit the research community, we open-source our code and make it available at https://github.com/RoboticsPolyu/IPN_MPC.
Trajectory Smoothing Using GNSS/PDR Integration Via Factor Graph Optimization in Urban Canyons
Dec 29, 2022Accurate and smooth global navigation satellite system (GNSS) positioning for pedestrians in urban canyons is still a challenge due to the multipath effects and the non-light-of-sight (NLOS) receptions caused by the reflections from surrounding buildings. The recently developed factor graph optimization (FGO) based GNSS positioning method opened a new window for improving urban GNSS positioning by effectively exploiting the measurement redundancy from the historical information to resist the outlier measurements. Unfortunately, the FGO-based GNSS standalone positioning is still challenged in highly urbanized areas. As an extension of the previous FGO-based GNSS positioning method, this paper exploits the potential of the pedestrian dead reckoning (PDR) model in FGO to improve the GNSS standalone positioning performance in urban canyons. Specifically, the relative motion of the pedestrian is estimated based on the raw acceleration measurements from the onboard smartphone inertial measurement unit (IMU) via the PDR algorithm. Then the raw GNSS pseudorange, Doppler measurements, and relative motion from PDR are integrated using the FGO. Given the context of pedestrian navigation with a small acceleration most of the time, a novel soft motion model is proposed to smooth the states involved in the factor graph model. The effectiveness of the proposed method is verified step-by-step through two datasets collected in dense urban canyons of Hong Kong using smartphone-level GNSS receivers. The comparison between the conventional extended Kalman filter, several existing methods, and FGO-based integration is presented. The results reveal that the existing FGO-based GNSS standalone positioning is highly complementary to the PDR's relative motion estimation. Both improved positioning accuracy and trajectory smoothness are obtained with the help of the proposed method.