 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-correlated Window Carrier-phase Aided GNSS Positioning Using Factor Graph Optimization for Urban Positioning
Sep 02, 2021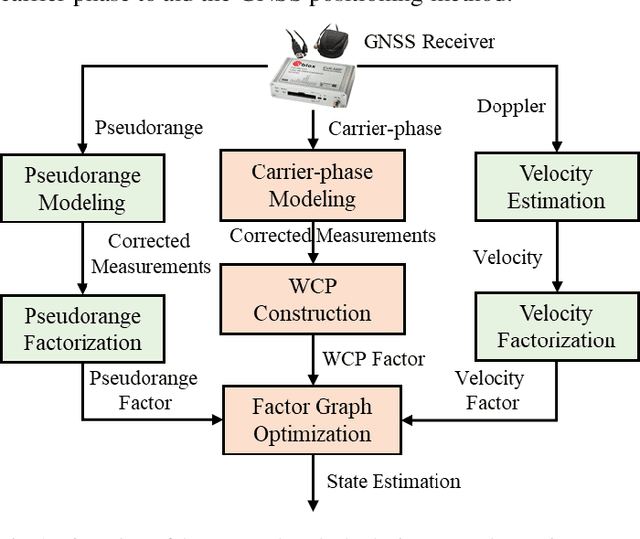
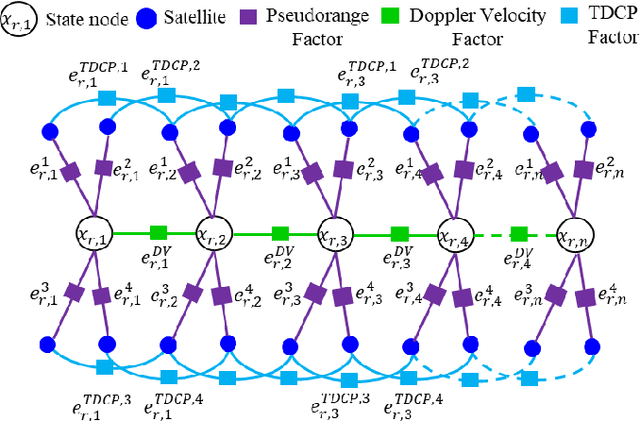
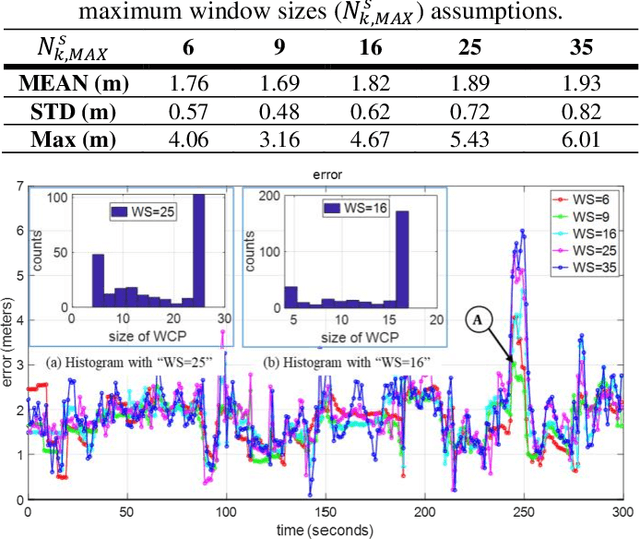
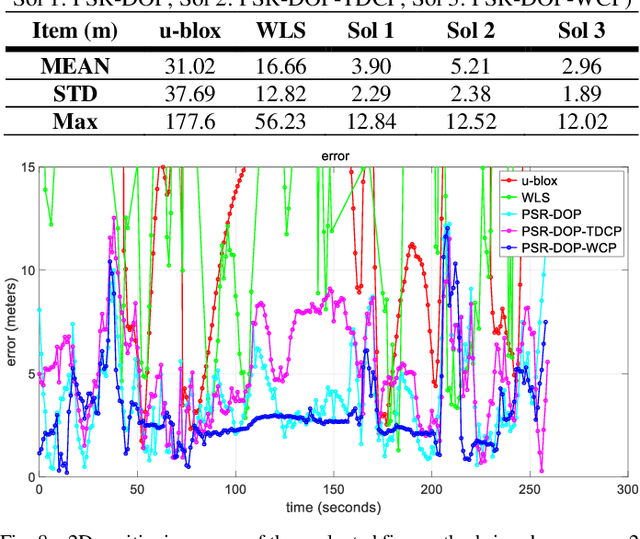
This paper proposes an improved global navigation satellite system (GNSS) positioning method that explores the time correlation between consecutive epochs of the code and carrier phase measurements which significantly increases the robustness against outlier measurements. Instead of relying on the time difference carrier phase (TDCP) which only considers two neighboring epochs using an extended Kalman filter (EKF) estimator, this paper proposed to employ the carrier-phase measurements inside a window, the so-called window carrier-phase (WCP), to constrain the states inside a factor graph. A left null space matrix is employed to eliminate the shared unknown ambiguity variables and therefore, correlated the associated states inside the WCP. Then the pseudorange, Doppler, and the constructed WCP measurements are integrated simultaneously using factor graph optimization (FGO) to estimate the state of the GNSS receiver. We evaluated the performance of the proposed method in two typical urban canyons in Hong Kong, achieving the mean positioning error of 1.76 meters and 2.96 meters, respectively, using the automobile-level GNSS receiver. Meanwhile, the effectiveness of the proposed method is further evaluated using a low-cost smartphone level GNSS receiver and similar improvement is also obtained, compared with several existing GNSS positioning methods.
It is time for Factor Graph Optimization for GNSS/INS Integration: Comparison between FGO and EKF
Apr 24, 2020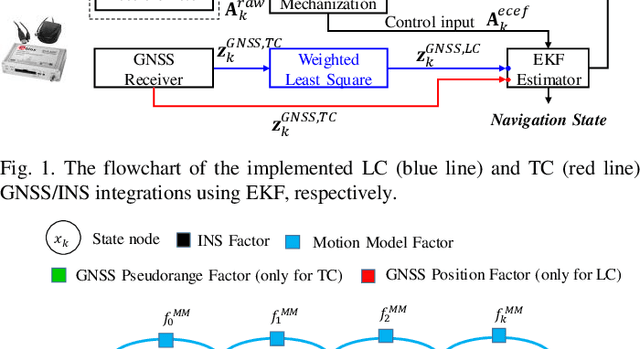
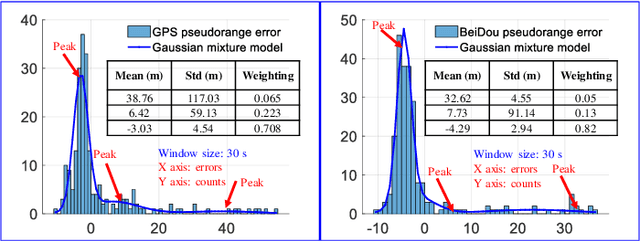
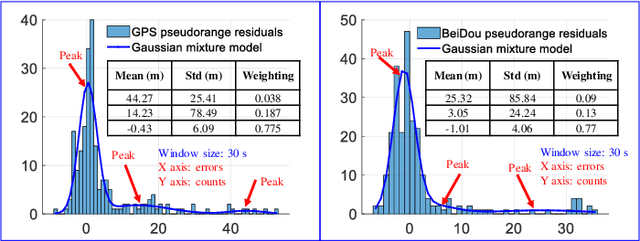
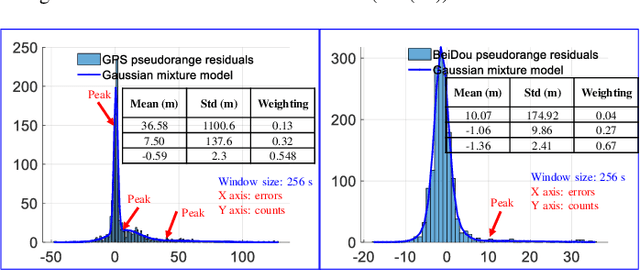
The recently proposed factor graph optimization (FGO) is adopted to integrate GNSS/INS attracted lots of attention and improved the performance over the existing EKF-based GNSS/INS integrations. However, a comprehensive comparison of those two GNSS/INS integration schemes in the urban canyon is not available. Moreover, the performance of the FGO-based GNSS/INS integration rely heavily on the size of the window of optimization. Effectively tuning the window size is still an open question. To fill this gap, this paper evaluates both loosely and tightly-coupled integrations using both EKF and FGO via the challenging dataset collected in the urban canyon. The detailed analysis of the results for the advantages of the FGO is also given in this paper by degenerating the FGO-based estimator to an EKF like estimator. More importantly, we analyze the effects of window size against the performance of FGO, by considering both the GNSS pseudorange error distribution and environmental conditions.
UrbanLoco: A Full Sensor Suite Dataset for Mapping and Localization in Urban Scenes
Dec 19, 2019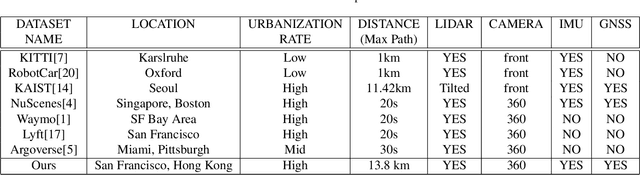
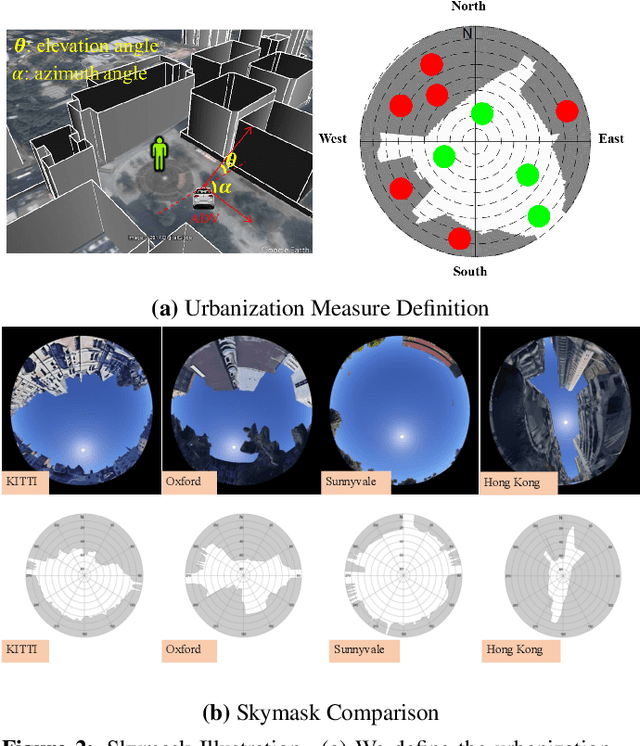
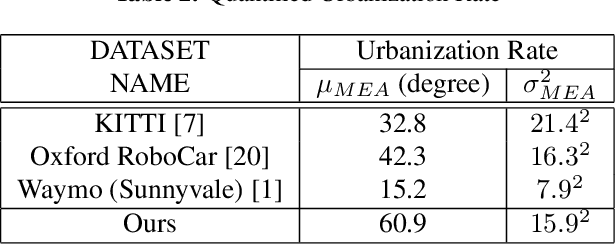
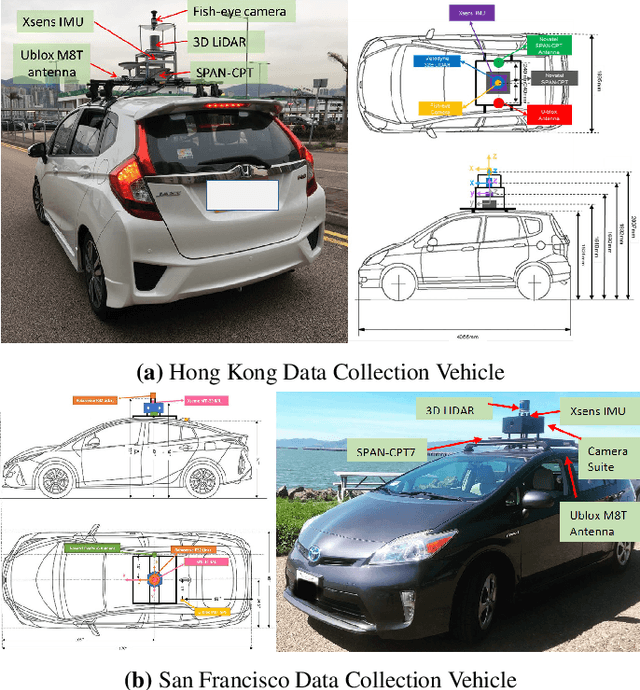
Mapping and localization is a critical module of autonomous driving, and significant achievements have been reached in this field. Beyond Global Navigation Satellite System (GNSS), research in point cloud registration, visual feature matching, and inertia navigation has greatly enhanced the accuracy and robustness of mapping and localization in different scenarios. However, highly urbanized scenes are still challenging: LIDAR- and camera-based methods perform poorly with numerous dynamic objects; the GNSS-based solutions experience signal loss and multipath problems; the inertia measurement units (IMU) suffer from drifting. Unfortunately, current public datasets either do not adequately address this urban challenge or do not provide enough sensor information related to mapping and localization. Here we present UrbanLoco: a mapping/localization dataset collected in highly-urbanized environments with a full sensor-suite. The dataset includes 13 trajectories collected in San Francisco and Hong Kong, covering a total length of over 40 kilometers. Our dataset includes a wide variety of urban terrains: urban canyons, bridges, tunnels, sharp turns, etc. More importantly, our dataset includes information from LIDAR, cameras, IMU, and GNSS receivers. Now the dataset is publicly available through the link in the footnote. Dataset Link: https://advdataset2019.wixsite.com/advlocalization.