 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving GNSS Positioning in Challenging Urban Areas by Digital Twin Database Correction
Aug 25, 2024



Accurate positioning technology is the foundation for industry and business applications. Although indoor and outdoor positioning techniques have been well studied separately, positioning performance in the intermediate period of changing the positioning environment is still challenging. This paper proposed a digital twin-aided positioning correction method for seamless positioning focusing on improving the receiver's outdoor positioning performance in urban areas, where the change of the positioning environment usually happens. The proposed algorithm will simulate the positioning solution for virtual receivers in a grid-based digital twin. Based on the simulated positioning solutions, a statistical model will be used to study the positioning characteristics and generate a correction information database for real receivers to improve their positioning performance. This algorithm has a low computation load on the receiver side and does not require a specially designed antenna, making it implementable for small-sized devices.
GNSS Outlier Mitigation Via Graduated Non-Convexity Factor Graph Optimization
Sep 02, 2021


Accurate and globally referenced global navigation satellite system (GNSS) based vehicular positioning can be achieved in outlier-free open areas. However, the performance of GNSS can be significantly degraded by outlier measurements, such as multipath effects and non-line-of-sight (NLOS) receptions arising from signal reflections of buildings. Inspired by the advantage of batch historical data in resisting outlier measurements, in this paper, we propose a graduated non-convexity factor graph optimization (FGO-GNC) to improve the GNSS positioning performance, where the impact of GNSS outliers is mitigated by estimating the optimal weightings of GNSS measurements. Different from the existing local solutions, the proposed FGO-GNC employs the non-convex Geman McClure (GM) function to globally estimate the weightings of GNSS measurements via a coarse-to-fine relaxation. The effectiveness of the proposed method is verified through several challenging datasets collected in urban canyons of Hong Kong using automobile level and low-cost smartphone level GNSS receivers.
UrbanLoco: A Full Sensor Suite Dataset for Mapping and Localization in Urban Scenes
Dec 19, 2019
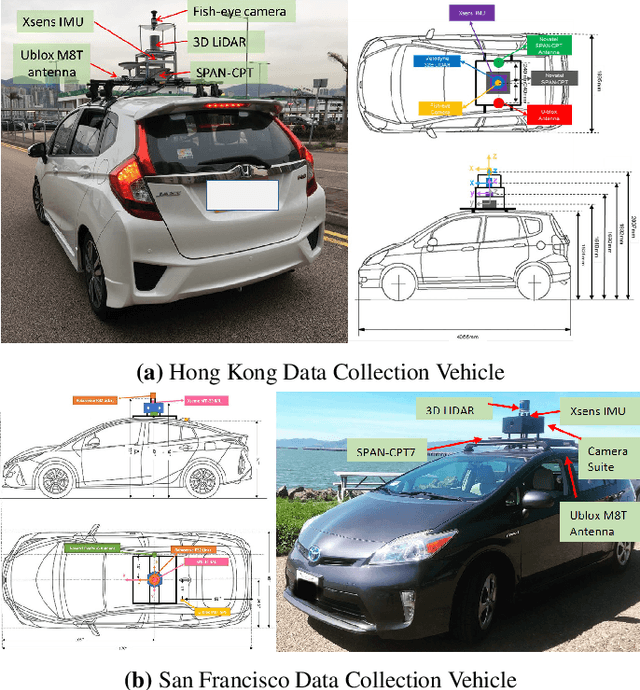
Mapping and localization is a critical module of autonomous driving, and significant achievements have been reached in this field. Beyond Global Navigation Satellite System (GNSS), research in point cloud registration, visual feature matching, and inertia navigation has greatly enhanced the accuracy and robustness of mapping and localization in different scenarios. However, highly urbanized scenes are still challenging: LIDAR- and camera-based methods perform poorly with numerous dynamic objects; the GNSS-based solutions experience signal loss and multipath problems; the inertia measurement units (IMU) suffer from drifting. Unfortunately, current public datasets either do not adequately address this urban challenge or do not provide enough sensor information related to mapping and localization. Here we present UrbanLoco: a mapping/localization dataset collected in highly-urbanized environments with a full sensor-suite. The dataset includes 13 trajectories collected in San Francisco and Hong Kong, covering a total length of over 40 kilometers. Our dataset includes a wide variety of urban terrains: urban canyons, bridges, tunnels, sharp turns, etc. More importantly, our dataset includes information from LIDAR, cameras, IMU, and GNSS receivers. Now the dataset is publicly available through the link in the footnote. Dataset Link: https://advdataset2019.wixsite.com/advlocalization.
Performance Analysis of NDT-based Graph SLAM for Autonomous Vehicle in Diverse Typical Driving Scenarios of Hong Kong
Nov 01, 2018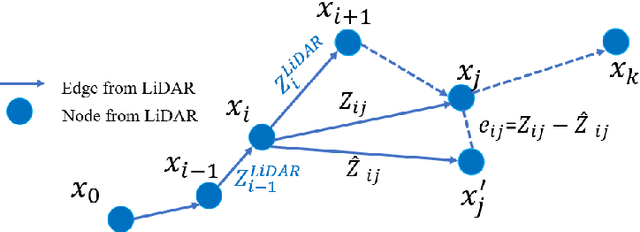


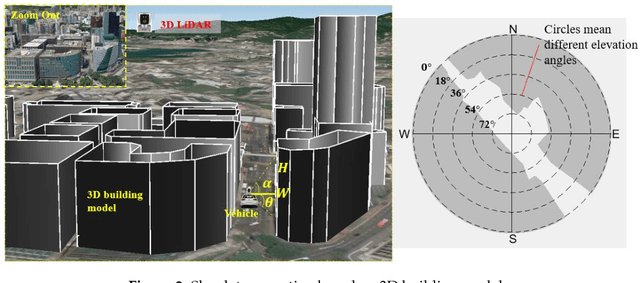
Robust and lane-level positioning is essential for autonomous vehicles. As an irreplaceable sensor, LiDAR can provide continuous and high-frequency pose estimation by means of mapping, on condition that enough environment features are available. The error of mapping can accumulate over time. Therefore, LiDAR is usually integrated with other sensors. In diverse urban scenarios, the environment feature availability relies heavily on the traffic (moving and static objects) and the degree of urbanization. Common LiDAR-based SLAM demonstrations tend to be studied in light traffic and less urbanized area. However, its performance can be severely challenged in deep urbanized cities, such as Hong Kong, Tokyo, and New York with dense traffic and tall buildings. This paper proposes to analyze the performance of standalone NDT-based graph SLAM and its reliability estimation in diverse urban scenarios to further evaluate the relationship between the performance of LiDAR-based SLAM and scenario conditions. The normal distribution transform (NDT) is employed to calculate the transformation between frames of point clouds. Then, the LiDAR odometry is performed based on the calculated continuous transformation. The state-of-the-art graph-based optimization is used to integrate the LiDAR odometry measurements to implement optimization. The 3D building models are generated and the definition of the degree of urbanization based on Skyplot is proposed. Experiments are implemented in different scenarios with different degrees of urbanization and traffic conditions. The results show that the performance of the LiDAR-based SLAM using NDT is strongly related to the traffic condition and degree of urbanization.
Exclusion of GNSS NLOS Receptions Caused by Dynamic Objects in Heavy Traffic Urban Scenarios Using Real-Time 3D Point Cloud: An Approach without 3D Maps
Apr 29, 2018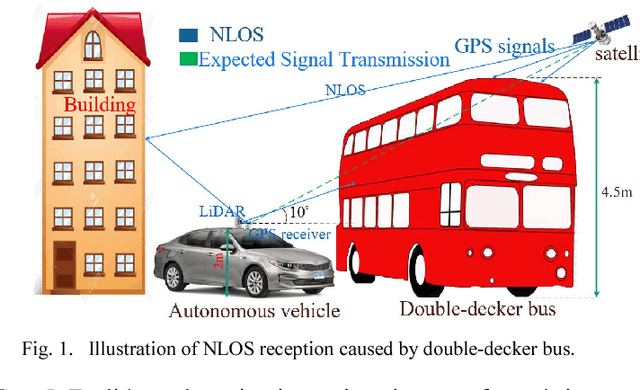


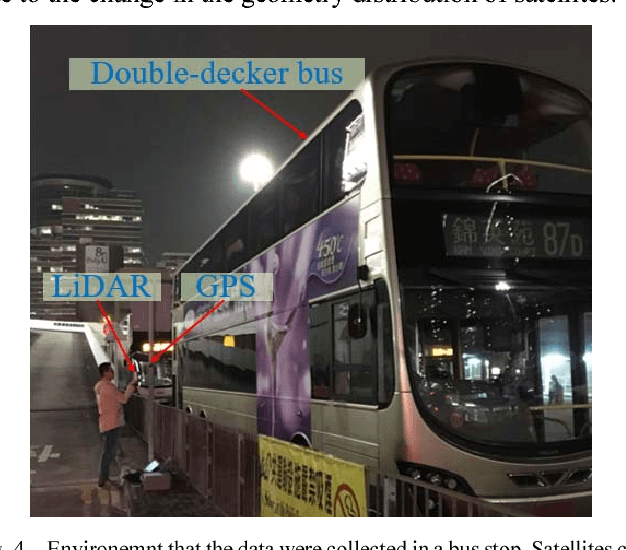
Absolute positioning is an essential factor for the arrival of autonomous driving. Global Navigation Satellites System (GNSS) receiver provides absolute localization for it. GNSS solution can provide satisfactory positioning in open or sub-urban areas, however, its performance suffered in super-urbanized area due to the phenomenon which are well-known as multipath effects and NLOS receptions. The effects dominate GNSS positioning performance in the area. The recent proposed 3D map aided (3DMA) GNSS can mitigate most of the multipath effects and NLOS receptions caused by buildings based on 3D city models. However, the same phenomenon caused by moving objects in urban area is currently not modelled in the 3D geographic information system (GIS). Moving objects with tall height, such as the double-decker bus, can also cause NLOS receptions because of the blockage of GNSS signals by surface of objects. Therefore, we present a novel method to exclude the NLOS receptions caused by double-decker bus in highly urbanized area, Hong Kong. To estimate the geometry dimension and orientation relative to GPS receiver, a Euclidean cluster algorithm and a classification method are used to detect the double-decker buses and calculate their relative locations. To increase the accuracy and reliability of the proposed NLOS exclusion method, an NLOS exclusion criterion is proposed to exclude the blocked satellites considering the elevation, signal noise ratio (SNR) and horizontal dilution of precision (HDOP). Finally, GNSS positioning is estimated by weighted least square (WLS) method using the remaining satellites after the NLOS exclusion. A static experiment was performed near a double-decker bus stop in Hong Kong, which verified the effectiveness of the proposed method.