 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn Proximity of ReLU DNN, PWA Function, and Explicit MPC
Jun 09, 2020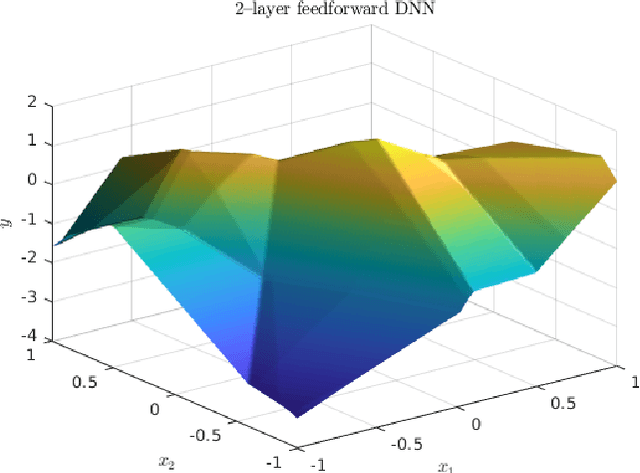
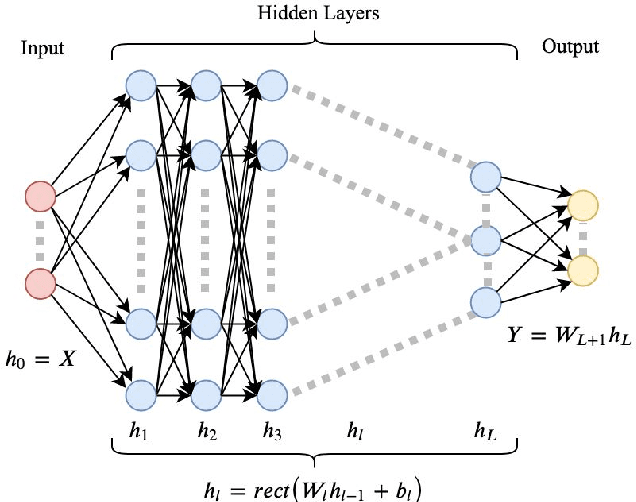
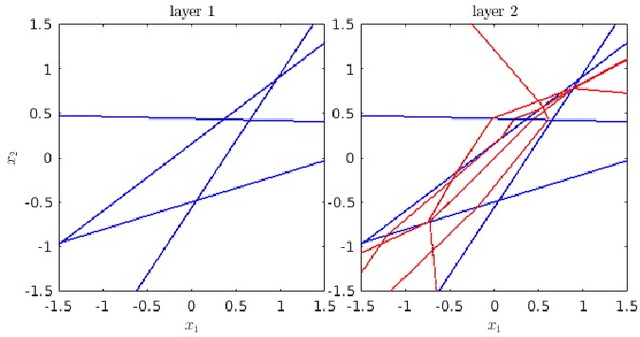
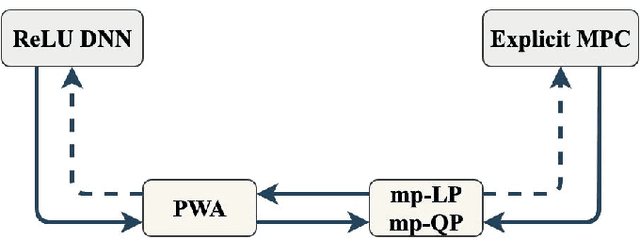
Rectifier (ReLU) deep neural networks (DNN) and their connection with piecewise affine (PWA) functions is analyzed. The paper is an effort to find and study the possibility of representing explicit state feedback policy of model predictive control (MPC) as a ReLU DNN, and vice versa. The complexity and architecture of DNN has been examined through some theorems and discussions. An approximate method has been developed for identification of input-space in ReLU net which results a PWA function over polyhedral regions. Also, inverse multiparametric linear or quadratic programs (mp-LP or mp-QP) has been studied which deals with reconstruction of constraints and cost function given a PWA function.
UrbanLoco: A Full Sensor Suite Dataset for Mapping and Localization in Urban Scenes
Dec 19, 2019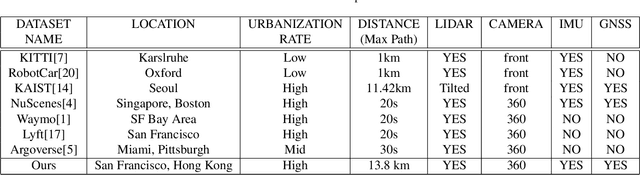
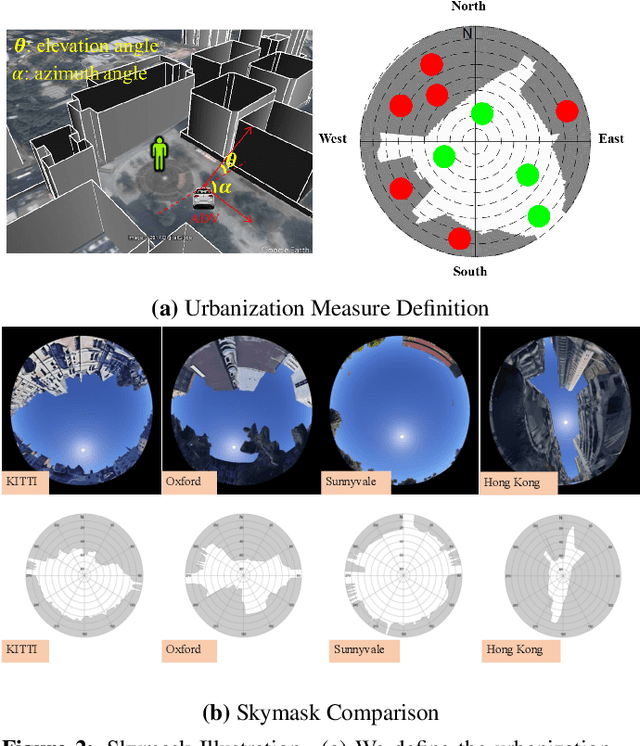
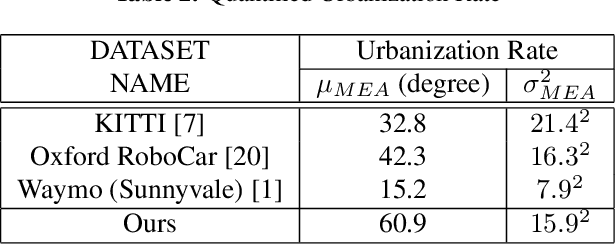
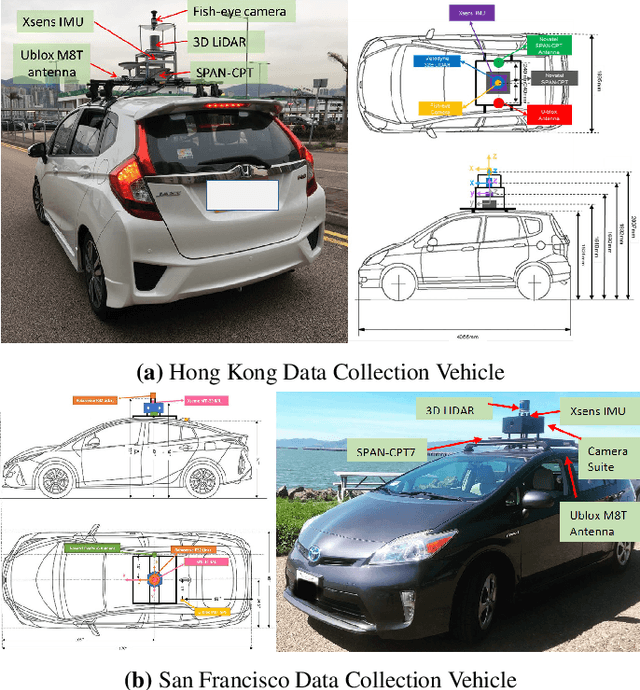
Mapping and localization is a critical module of autonomous driving, and significant achievements have been reached in this field. Beyond Global Navigation Satellite System (GNSS), research in point cloud registration, visual feature matching, and inertia navigation has greatly enhanced the accuracy and robustness of mapping and localization in different scenarios. However, highly urbanized scenes are still challenging: LIDAR- and camera-based methods perform poorly with numerous dynamic objects; the GNSS-based solutions experience signal loss and multipath problems; the inertia measurement units (IMU) suffer from drifting. Unfortunately, current public datasets either do not adequately address this urban challenge or do not provide enough sensor information related to mapping and localization. Here we present UrbanLoco: a mapping/localization dataset collected in highly-urbanized environments with a full sensor-suite. The dataset includes 13 trajectories collected in San Francisco and Hong Kong, covering a total length of over 40 kilometers. Our dataset includes a wide variety of urban terrains: urban canyons, bridges, tunnels, sharp turns, etc. More importantly, our dataset includes information from LIDAR, cameras, IMU, and GNSS receivers. Now the dataset is publicly available through the link in the footnote. Dataset Link: https://advdataset2019.wixsite.com/advlocalization.
Robust Feature-Based Point Registration Using Directional Mixture Model
Nov 25, 2019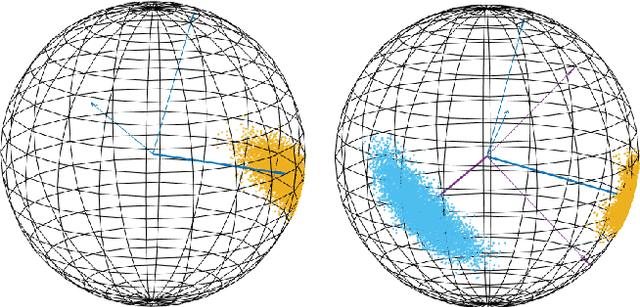

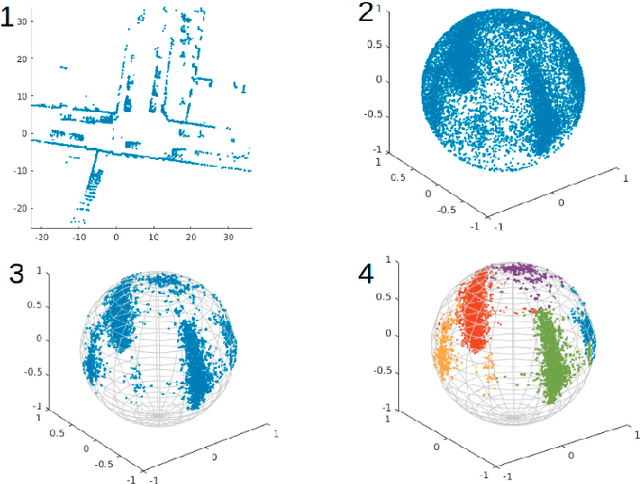
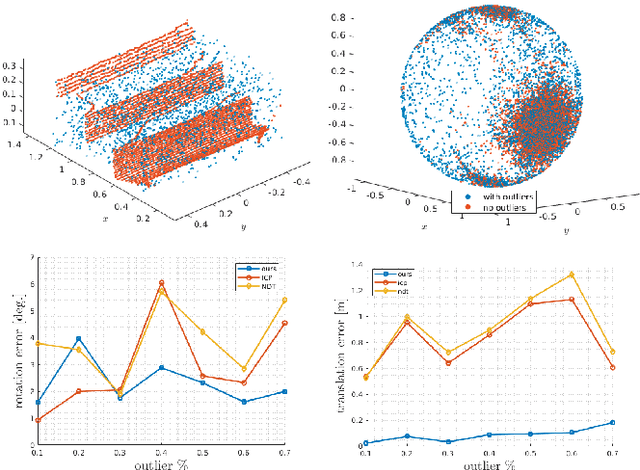
This paper presents a robust probabilistic point registration method for estimating the rigid transformation (i.e. rotation matrix and translation vector) between two pointcloud dataset. The method improves the robustness of point registration and consequently the robot localization in the presence of outliers in the pointclouds which always occurs due to occlusion, dynamic objects, and sensor errors. The framework models the point registration task based on directional statistics on a unit sphere. In particular, a Kent distribution mixture model is adopted and the process of point registration has been carried out in the two phases of Expectation-Maximization algorithm. The proposed method has been evaluated on the pointcloud dataset from LiDAR sensors in an indoor environment.
An algorithm for real-time restructuring of a ranging-based localization network
Apr 25, 2018
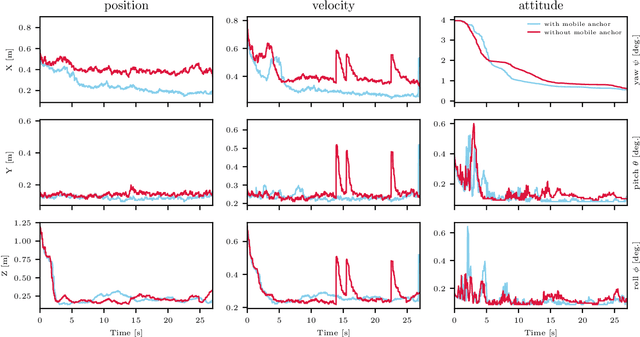
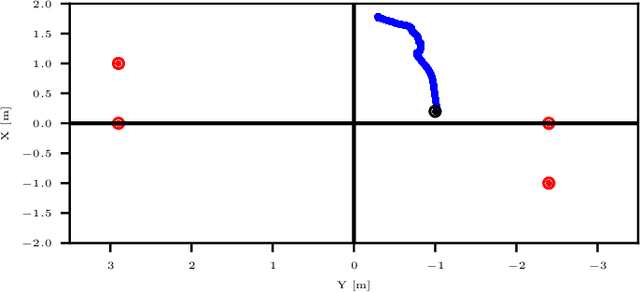
This paper presents a method to improve the localization accuracy of robots operating in a range-based localization network. The method is favorable especially when the robots operate in harsh environments where the access to a robust and reliable localization system is limited. A state estimator is used for a six degree of freedom object using inertial sensors as well as an Ultra-wideband (UWB) range measurement sensor. The estimator is incorporated into an adaptive algorithm, improving the localization quality of an agent by using a mobile UWB ranging sensor, where the mobile anchor moves to improve localization quality. The algorithm reconstructs localization network in real-time to minimize the determinant of the covariance matrix in the sense of least square error. Finally, the proposed algorithm is experimentally validated in a network consisting of one mobile and four fixed anchors.
Optimal measurement selection algorithm and estimator for ultra-wideband symmetric ranging localization
Apr 25, 2018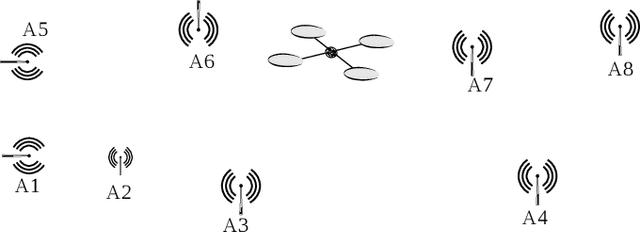


A state estimator is derived for an agent with the ability to measure single ranges to fixed points in its environment, and equipped with an accelerometer and a rate gyroscope. The state estimator makes no agent-specific assumptions, and can be immediately applied to any rigid body with these sensors. Also, the state estimator doesn't use any trilateration-based method to calculate position from range measurements. As the considered system can only make a single range measurement at a time, we present a greedy optimization algorithm for selecting the best measurement. Experiments in an indoor testbed using an externally controlled multicopter demonstrate the efficacy of the algorithm, specifically showing an improvement over a na\"ive strategy of a fixed sequence of measurements. In separate experiments, the algorithm is also used in feedback control, to control the position of the multicopter.