 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKaLDeX: Kalman Filter based Linear Deformable Cross Attention for Retina Vessel Segmentation
Oct 28, 2024Background and Objective: In the realm of ophthalmic imaging, accurate vascular segmentation is paramount for diagnosing and managing various eye diseases. Contemporary deep learning-based vascular segmentation models rival human accuracy but still face substantial challenges in accurately segmenting minuscule blood vessels in neural network applications. Due to the necessity of multiple downsampling operations in the CNN models, fine details from high-resolution images are inevitably lost. The objective of this study is to design a structure to capture the delicate and small blood vessels. Methods: To address these issues, we propose a novel network (KaLDeX) for vascular segmentation leveraging a Kalman filter based linear deformable cross attention (LDCA) module, integrated within a UNet++ framework. Our approach is based on two key components: Kalman filter (KF) based linear deformable convolution (LD) and cross-attention (CA) modules. The LD module is designed to adaptively adjust the focus on thin vessels that might be overlooked in standard convolution. The CA module improves the global understanding of vascular structures by aggregating the detailed features from the LD module with the high level features from the UNet++ architecture. Finally, we adopt a topological loss function based on persistent homology to constrain the topological continuity of the segmentation. Results: The proposed method is evaluated on retinal fundus image datasets (DRIVE, CHASE_BD1, and STARE) as well as the 3mm and 6mm of the OCTA-500 dataset, achieving an average accuracy (ACC) of 97.25%, 97.77%, 97.85%, 98.89%, and 98.21%, respectively. Conclusions: Empirical evidence shows that our method outperforms the current best models on different vessel segmentation datasets. Our source code is available at: https://github.com/AIEyeSystem/KalDeX.
CaRtGS: Computational Alignment for Real-Time Gaussian Splatting SLAM
Oct 02, 2024Simultaneous Localization and Mapping (SLAM) is pivotal in robotics, with photorealistic scene reconstruction emerging as a key challenge. To address this, we introduce Computational Alignment for Real-Time Gaussian Splatting SLAM (CaRtGS), a novel method enhancing the efficiency and quality of photorealistic scene reconstruction in real-time environments. Leveraging 3D Gaussian Splatting (3DGS), CaRtGS achieves superior rendering quality and processing speed, which is crucial for scene photorealistic reconstruction. Our approach tackles computational misalignment in Gaussian Splatting SLAM (GS-SLAM) through an adaptive strategy that optimizes training, addresses long-tail optimization, and refines densification. Experiments on Replica and TUM-RGBD datasets demonstrate CaRtGS's effectiveness in achieving high-fidelity rendering with fewer Gaussian primitives. This work propels SLAM towards real-time, photorealistic dense rendering, significantly advancing photorealistic scene representation. For the benefit of the research community, we release the code on our project website: https://dapengfeng.github.io/cartgs.
RELEAD: Resilient Localization with Enhanced LiDAR Odometry in Adverse Environments
Mar 15, 2024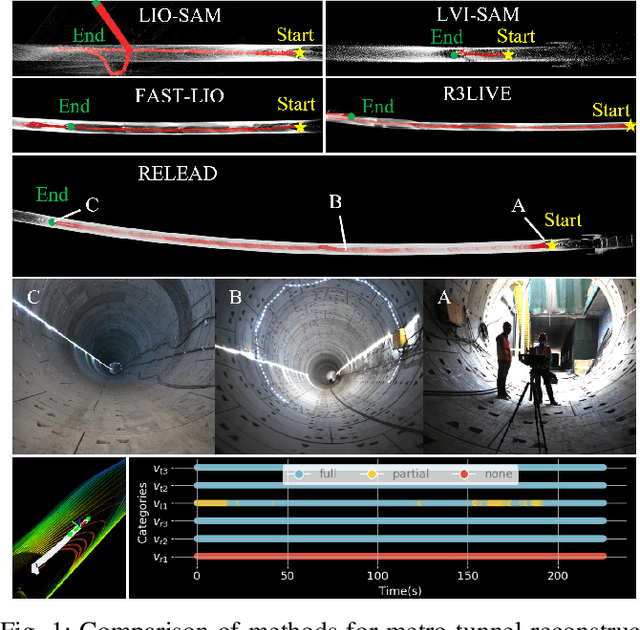
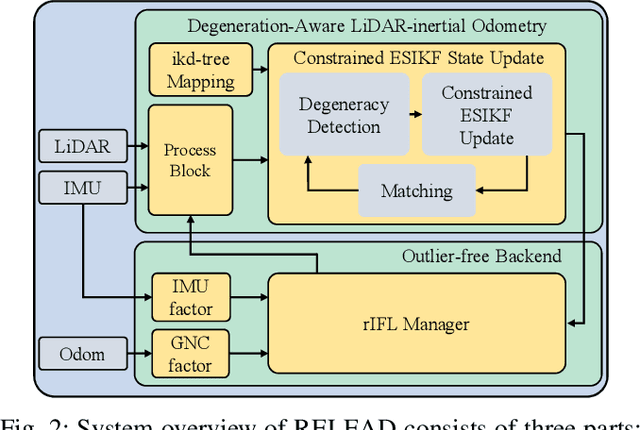
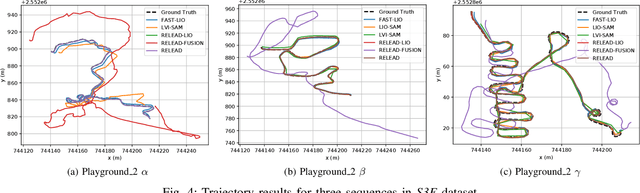
LiDAR-based localization is valuable for applications like mining surveys and underground facility maintenance. However, existing methods can struggle when dealing with uninformative geometric structures in challenging scenarios. This paper presents RELEAD, a LiDAR-centric solution designed to address scan-matching degradation. Our method enables degeneracy-free point cloud registration by solving constrained ESIKF updates in the front end and incorporates multisensor constraints, even when dealing with outlier measurements, through graph optimization based on Graduated Non-Convexity (GNC). Additionally, we propose a robust Incremental Fixed Lag Smoother (rIFL) for efficient GNC-based optimization. RELEAD has undergone extensive evaluation in degenerate scenarios and has outperformed existing state-of-the-art LiDAR-Inertial odometry and LiDAR-Visual-Inertial odometry methods.
CoLRIO: LiDAR-Ranging-Inertial Centralized State Estimation for Robotic Swarms
Feb 23, 2024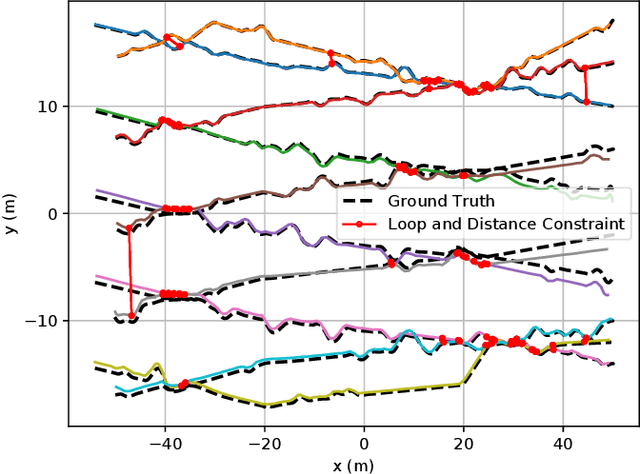
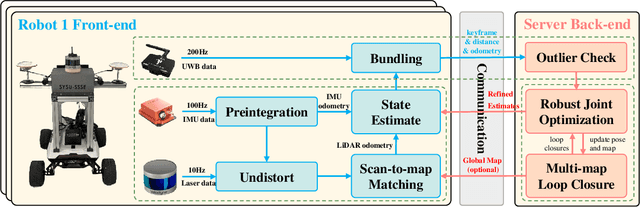
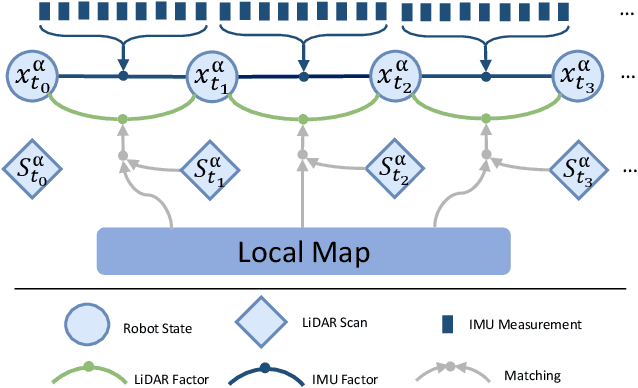
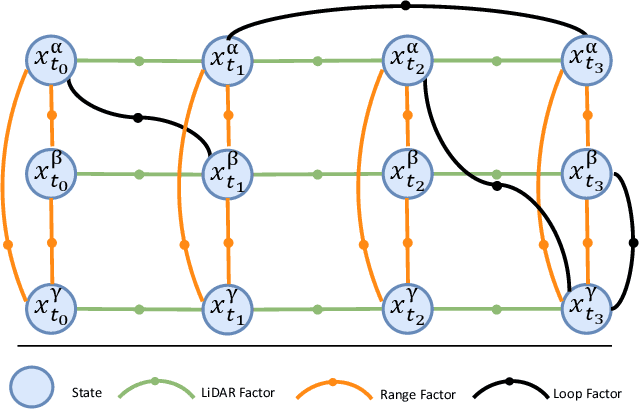
Collaborative state estimation using different heterogeneous sensors is a fundamental prerequisite for robotic swarms operating in GPS-denied environments, posing a significant research challenge. In this paper, we introduce a centralized system to facilitate collaborative LiDAR-ranging-inertial state estimation, enabling robotic swarms to operate without the need for anchor deployment. The system efficiently distributes computationally intensive tasks to a central server, thereby reducing the computational burden on individual robots for local odometry calculations. The server back-end establishes a global reference by leveraging shared data and refining joint pose graph optimization through place recognition, global optimization techniques, and removal of outlier data to ensure precise and robust collaborative state estimation. Extensive evaluations of our system, utilizing both publicly available datasets and our custom datasets, demonstrate significant enhancements in the accuracy of collaborative SLAM estimates. Moreover, our system exhibits remarkable proficiency in large-scale missions, seamlessly enabling ten robots to collaborate effectively in performing SLAM tasks. In order to contribute to the research community, we will make our code open-source and accessible at \url{https://github.com/PengYu-team/Co-LRIO}.
S3E: A Large-scale Multimodal Dataset for Collaborative SLAM
Oct 25, 2022



With the advanced request to employ a team of robots to perform a task collaboratively, the research community has become increasingly interested in collaborative simultaneous localization and mapping. Unfortunately, existing datasets are limited in the scale and variation of the collaborative trajectories they capture, even though generalization between inter-trajectories among different agents is crucial to the overall viability of collaborative tasks. To help align the research community's contributions with real-world multiagent ordinated SLAM problems, we introduce S3E, a novel large-scale multimodal dataset captured by a fleet of unmanned ground vehicles along four designed collaborative trajectory paradigms. S3E consists of 7 outdoor and 5 indoor scenes that each exceed 200 seconds, consisting of well synchronized and calibrated high-quality stereo camera, LiDAR, and high-frequency IMU data. Crucially, our effort exceeds previous attempts regarding dataset size, scene variability, and complexity. It has 4x as much average recording time as the pioneering EuRoC dataset. We also provide careful dataset analysis as well as baselines for collaborative SLAM and single counterparts. Find data, code, and more up-to-date information at https://github.com/PengYu-Team/S3E.