 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUrbanV2X: A Multisensory Vehicle-Infrastructure Dataset for Cooperative Navigation in Urban Areas
Dec 23, 2025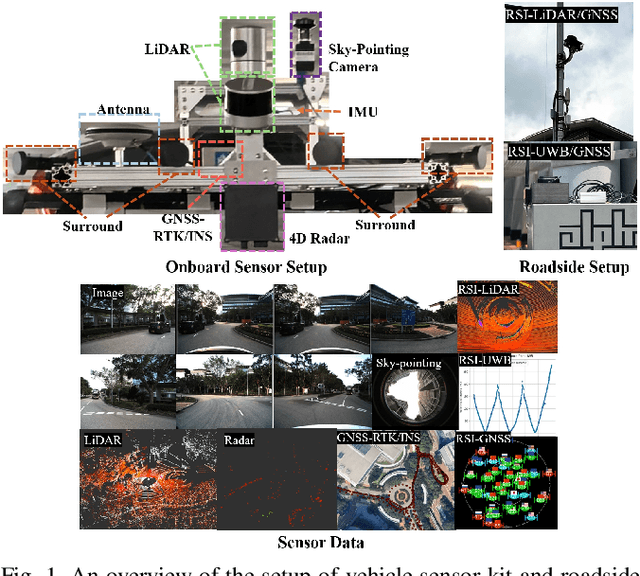
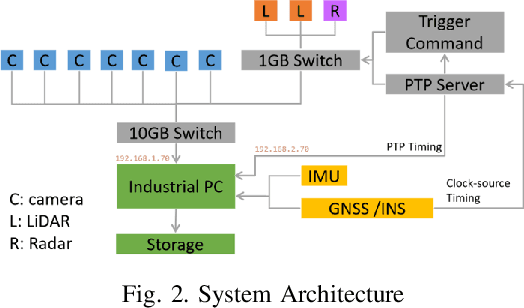

Due to the limitations of a single autonomous vehicle, Cellular Vehicle-to-Everything (C-V2X) technology opens a new window for achieving fully autonomous driving through sensor information sharing. However, real-world datasets supporting vehicle-infrastructure cooperative navigation in complex urban environments remain rare. To address this gap, we present UrbanV2X, a comprehensive multisensory dataset collected from vehicles and roadside infrastructure in the Hong Kong C-V2X testbed, designed to support research on smart mobility applications in dense urban areas. Our onboard platform provides synchronized data from multiple industrial cameras, LiDARs, 4D radar, ultra-wideband (UWB), IMU, and high-precision GNSS-RTK/INS navigation systems. Meanwhile, our roadside infrastructure provides LiDAR, GNSS, and UWB measurements. The entire vehicle-infrastructure platform is synchronized using the Precision Time Protocol (PTP), with sensor calibration data provided. We also benchmark various navigation algorithms to evaluate the collected cooperative data. The dataset is publicly available at https://polyu-taslab.github.io/UrbanV2X/.
Two stage GNSS outlier detection for factor graph optimization based GNSS-RTK/INS/odometer fusion
Oct 01, 2025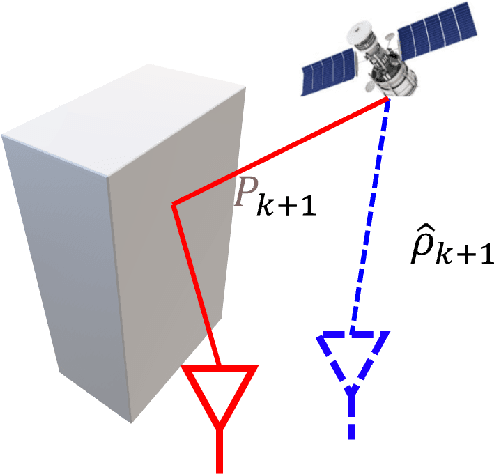
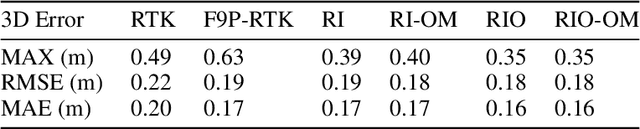
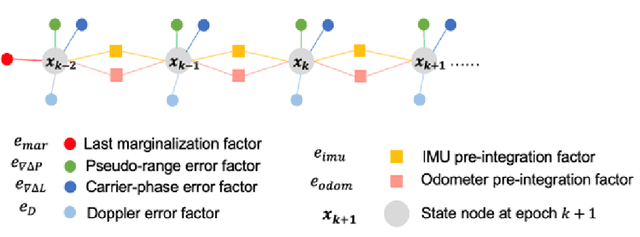
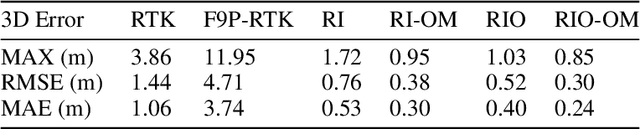
Reliable GNSS positioning in complex environments remains a critical challenge due to non-line-of-sight (NLOS) propagation, multipath effects, and frequent signal blockages. These effects can easily introduce large outliers into the raw pseudo-range measurements, which significantly degrade the performance of global navigation satellite system (GNSS) real-time kinematic (RTK) positioning and limit the effectiveness of tightly coupled GNSS-based integrated navigation system. To address this issue, we propose a two-stage outlier detection method and apply the method in a tightly coupled GNSS-RTK, inertial navigation system (INS), and odometer integration based on factor graph optimization (FGO). In the first stage, Doppler measurements are employed to detect pseudo-range outliers in a GNSS-only manner, since Doppler is less sensitive to multipath and NLOS effects compared with pseudo-range, making it a more stable reference for detecting sudden inconsistencies. In the second stage, pre-integrated inertial measurement units (IMU) and odometer constraints are used to generate predicted double-difference pseudo-range measurements, which enable a more refined identification and rejection of remaining outliers. By combining these two complementary stages, the system achieves improved robustness against both gross pseudo-range errors and degraded satellite measuring quality. The experimental results demonstrate that the two-stage detection framework significantly reduces the impact of pseudo-range outliers, and leads to improved positioning accuracy and consistency compared with representative baseline approaches. In the deep urban canyon test, the outlier mitigation method has limits the RMSE of GNSS-RTK/INS/odometer fusion from 0.52 m to 0.30 m, with 42.3% improvement.
ECMD: An Event-Centric Multisensory Driving Dataset for SLAM
Nov 04, 2023Leveraging multiple sensors enhances complex environmental perception and increases resilience to varying luminance conditions and high-speed motion patterns, achieving precise localization and mapping. This paper proposes, ECMD, an event-centric multisensory dataset containing 81 sequences and covering over 200 km of various challenging driving scenarios including high-speed motion, repetitive scenarios, dynamic objects, etc. ECMD provides data from two sets of stereo event cameras with different resolutions (640*480, 346*260), stereo industrial cameras, an infrared camera, a top-installed mechanical LiDAR with two slanted LiDARs, two consumer-level GNSS receivers, and an onboard IMU. Meanwhile, the ground-truth of the vehicle was obtained using a centimeter-level high-accuracy GNSS-RTK/INS navigation system. All sensors are well-calibrated and temporally synchronized at the hardware level, with recording data simultaneously. We additionally evaluate several state-of-the-art SLAM algorithms for benchmarking visual and LiDAR SLAM and identifying their limitations. The dataset is available at https://arclab-hku.github.io/ecmd/.
Trajectory Smoothing Using GNSS/PDR Integration Via Factor Graph Optimization in Urban Canyons
Dec 29, 2022Accurate and smooth global navigation satellite system (GNSS) positioning for pedestrians in urban canyons is still a challenge due to the multipath effects and the non-light-of-sight (NLOS) receptions caused by the reflections from surrounding buildings. The recently developed factor graph optimization (FGO) based GNSS positioning method opened a new window for improving urban GNSS positioning by effectively exploiting the measurement redundancy from the historical information to resist the outlier measurements. Unfortunately, the FGO-based GNSS standalone positioning is still challenged in highly urbanized areas. As an extension of the previous FGO-based GNSS positioning method, this paper exploits the potential of the pedestrian dead reckoning (PDR) model in FGO to improve the GNSS standalone positioning performance in urban canyons. Specifically, the relative motion of the pedestrian is estimated based on the raw acceleration measurements from the onboard smartphone inertial measurement unit (IMU) via the PDR algorithm. Then the raw GNSS pseudorange, Doppler measurements, and relative motion from PDR are integrated using the FGO. Given the context of pedestrian navigation with a small acceleration most of the time, a novel soft motion model is proposed to smooth the states involved in the factor graph model. The effectiveness of the proposed method is verified step-by-step through two datasets collected in dense urban canyons of Hong Kong using smartphone-level GNSS receivers. The comparison between the conventional extended Kalman filter, several existing methods, and FGO-based integration is presented. The results reveal that the existing FGO-based GNSS standalone positioning is highly complementary to the PDR's relative motion estimation. Both improved positioning accuracy and trajectory smoothness are obtained with the help of the proposed method.