 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUrbanV2X: A Multisensory Vehicle-Infrastructure Dataset for Cooperative Navigation in Urban Areas
Dec 23, 2025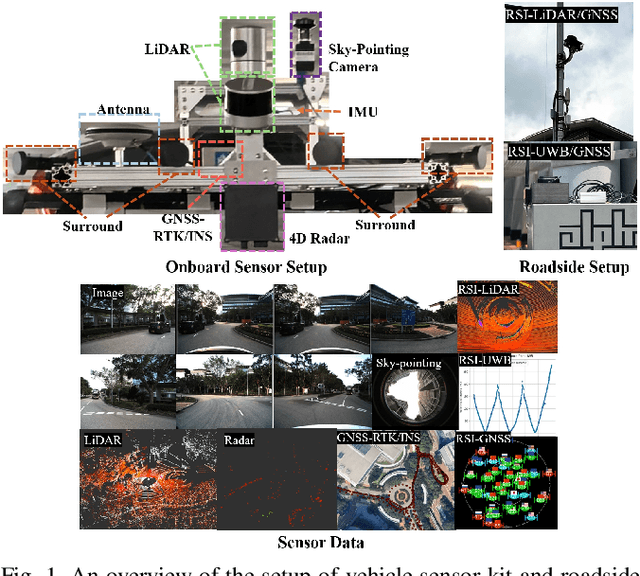
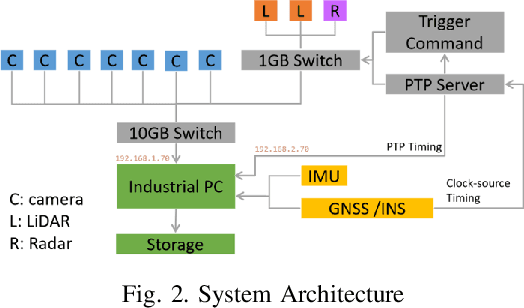

Due to the limitations of a single autonomous vehicle, Cellular Vehicle-to-Everything (C-V2X) technology opens a new window for achieving fully autonomous driving through sensor information sharing. However, real-world datasets supporting vehicle-infrastructure cooperative navigation in complex urban environments remain rare. To address this gap, we present UrbanV2X, a comprehensive multisensory dataset collected from vehicles and roadside infrastructure in the Hong Kong C-V2X testbed, designed to support research on smart mobility applications in dense urban areas. Our onboard platform provides synchronized data from multiple industrial cameras, LiDARs, 4D radar, ultra-wideband (UWB), IMU, and high-precision GNSS-RTK/INS navigation systems. Meanwhile, our roadside infrastructure provides LiDAR, GNSS, and UWB measurements. The entire vehicle-infrastructure platform is synchronized using the Precision Time Protocol (PTP), with sensor calibration data provided. We also benchmark various navigation algorithms to evaluate the collected cooperative data. The dataset is publicly available at https://polyu-taslab.github.io/UrbanV2X/.
3D LiDAR Aided GNSS NLOS Mitigation for Reliable GNSS-RTK Positioning in Urban Canyons
Dec 11, 2022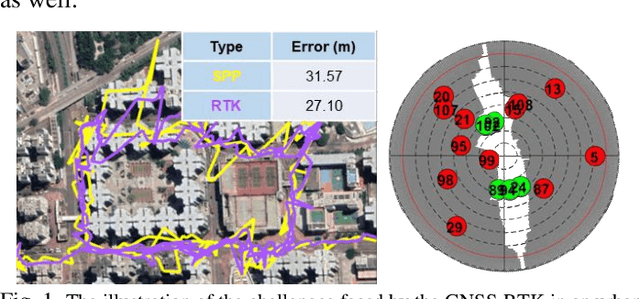
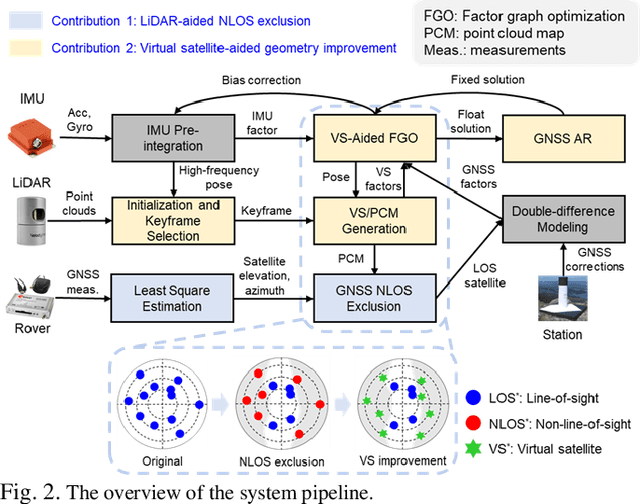
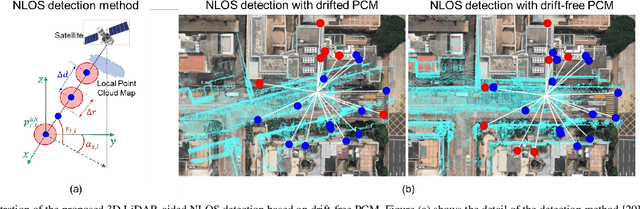
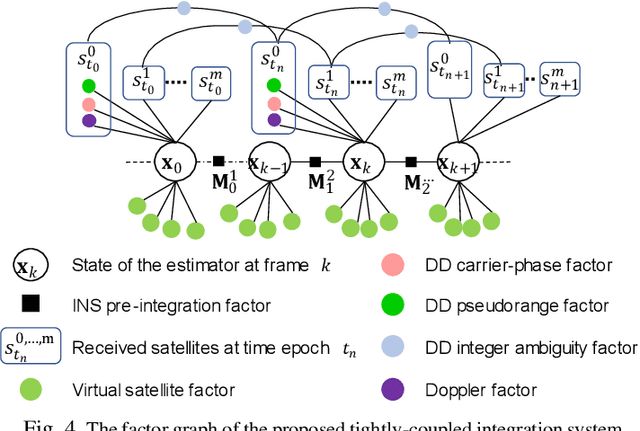
GNSS and LiDAR odometry are complementary as they provide absolute and relative positioning, respectively. Their integration in a loosely-coupled manner is straightforward but is challenged in urban canyons due to the GNSS signal reflections. Recent proposed 3D LiDAR-aided (3DLA) GNSS methods employ the point cloud map to identify the non-line-of-sight (NLOS) reception of GNSS signals. This facilitates the GNSS receiver to obtain improved urban positioning but not achieve a sub-meter level. GNSS real-time kinematics (RTK) uses carrier phase measurements to obtain decimeter-level positioning. In urban areas, the GNSS RTK is not only challenged by multipath and NLOS-affected measurement but also suffers from signal blockage by the building. The latter will impose a challenge in solving the ambiguity within the carrier phase measurements. In the other words, the model observability of the ambiguity resolution (AR) is greatly decreased. This paper proposes to generate virtual satellite (VS) measurements using the selected LiDAR landmarks from the accumulated 3D point cloud maps (PCM). These LiDAR-PCM-made VS measurements are tightly-coupled with GNSS pseudorange and carrier phase measurements. Thus, the VS measurements can provide complementary constraints, meaning providing low-elevation-angle measurements in the across-street directions. The implementation is done using factor graph optimization to solve an accurate float solution of the ambiguity before it is fed into LAMBDA. The effectiveness of the proposed method has been validated by the evaluation conducted on our recently open-sourced challenging dataset, UrbanNav. The result shows the fix rate of the proposed 3DLA GNSS RTK is about 30% while the conventional GNSS-RTK only achieves about 14%. In addition, the proposed method achieves sub-meter positioning accuracy in most of the data collected in challenging urban areas.