 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreference Score Distillation: Leveraging 2D Rewards to Align Text-to-3D Generation with Human Preference
Mar 02, 2026Human preference alignment presents a critical yet underexplored challenge for diffusion models in text-to-3D generation. Existing solutions typically require task-specific fine-tuning, posing significant hurdles in data-scarce 3D domains. To address this, we propose Preference Score Distillation (PSD), an optimization-based framework that leverages pretrained 2D reward models for human-aligned text-to-3D synthesis without 3D training data. Our key insight stems from the incompatibility of pixel-level gradients: due to the absence of noisy samples during reward model training, direct application of 2D reward gradients disturbs the denoising process. Noticing that similar issue occurs in the naive classifier guidance in conditioned diffusion models, we fundamentally rethink preference alignment as a classifier-free guidance (CFG)-style mechanism through our implicit reward model. Furthermore, recognizing that frozen pretrained diffusion models constrain performance, we introduce an adaptive strategy to co-optimize preference scores and negative text embeddings. By incorporating CFG during optimization, online refinement of negative text embeddings dynamically enhances alignment. To our knowledge, we are the first to bridge human preference alignment with CFG theory under score distillation framework. Experiments demonstrate the superiority of PSD in aesthetic metrics, seamless integration with diverse pipelines, and strong extensibility.
Distilling Token-Trained Models into Byte-Level Models
Feb 01, 2026Byte Language Models (BLMs) have emerged as a promising direction for scaling language models beyond tokenization. However, existing BLMs typically require training from scratch on trillions of bytes, making them prohibitively expensive. In this paper, we propose an efficient distillation recipe that converts existing token-trained LLMs into BLMs while retaining comparable capabilities. Our recipe follows a two-stage curriculum: (1) Progressive Knowledge Distillation, which aligns byte-level representations with the embeddings of the token-trained teacher model; and (2) Byte-Level Supervised Fine-Tuning, which enables end-to-end generation entirely in the byte space. We validate our approach across multiple model families, including Llama, Qwen, and OLMo, and demonstrate that the distilled BLMs retain most of the teacher models' performance using only approximately 125B bytes.
Quantum Optimization via Gradient-Based Hamiltonian Descent
May 20, 2025With rapid advancements in machine learning, first-order algorithms have emerged as the backbone of modern optimization techniques, owing to their computational efficiency and low memory requirements. Recently, the connection between accelerated gradient methods and damped heavy-ball motion, particularly within the framework of Hamiltonian dynamics, has inspired the development of innovative quantum algorithms for continuous optimization. One such algorithm, Quantum Hamiltonian Descent (QHD), leverages quantum tunneling to escape saddle points and local minima, facilitating the discovery of global solutions in complex optimization landscapes. However, QHD faces several challenges, including slower convergence rates compared to classical gradient methods and limited robustness in highly non-convex problems due to the non-local nature of quantum states. Furthermore, the original QHD formulation primarily relies on function value information, which limits its effectiveness. Inspired by insights from high-resolution differential equations that have elucidated the acceleration mechanisms in classical methods, we propose an enhancement to QHD by incorporating gradient information, leading to what we call gradient-based QHD. Gradient-based QHD achieves faster convergence and significantly increases the likelihood of identifying global solutions. Numerical simulations on challenging problem instances demonstrate that gradient-based QHD outperforms existing quantum and classical methods by at least an order of magnitude.
Operator-Level Quantum Acceleration of Non-Logconcave Sampling
May 08, 2025Sampling from probability distributions of the form $\sigma \propto e^{-\beta V}$, where $V$ is a continuous potential, is a fundamental task across physics, chemistry, biology, computer science, and statistics. However, when $V$ is non-convex, the resulting distribution becomes non-logconcave, and classical methods such as Langevin dynamics often exhibit poor performance. We introduce the first quantum algorithm that provably accelerates a broad class of continuous-time sampling dynamics. For Langevin dynamics, our method encodes the target Gibbs measure into the amplitudes of a quantum state, identified as the kernel of a block matrix derived from a factorization of the Witten Laplacian operator. This connection enables Gibbs sampling via singular value thresholding and yields the first provable quantum advantage with respect to the Poincar\'e constant in the non-logconcave setting. Building on this framework, we further develop the first quantum algorithm that accelerates replica exchange Langevin diffusion, a widely used method for sampling from complex, rugged energy landscapes.
Random Long-Context Access for Mamba via Hardware-aligned Hierarchical Sparse Attention
Apr 23, 2025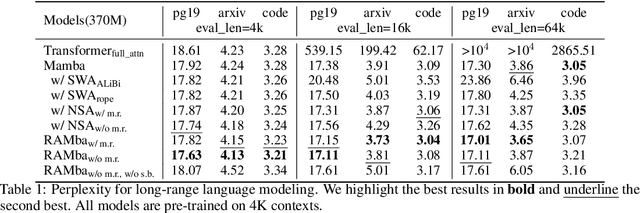
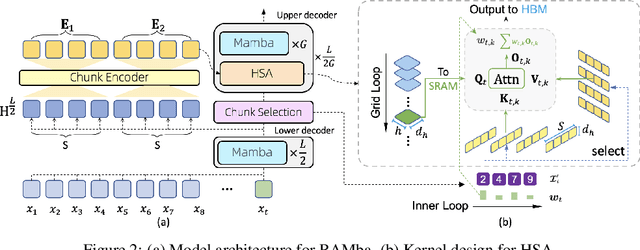
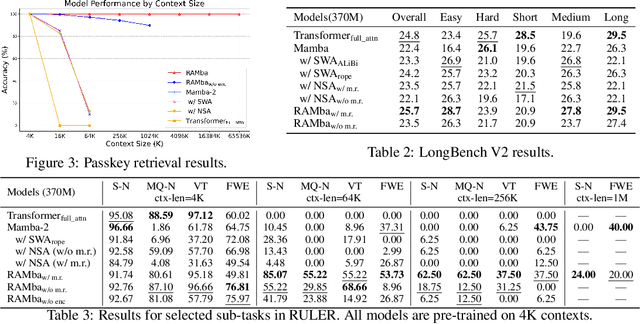
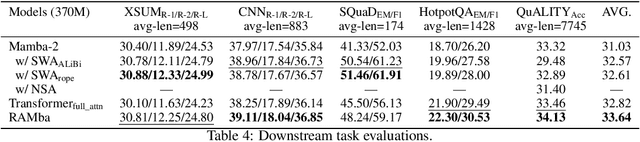
A key advantage of Recurrent Neural Networks (RNNs) over Transformers is their linear computational and space complexity enables faster training and inference for long sequences. However, RNNs are fundamentally unable to randomly access historical context, and simply integrating attention mechanisms may undermine their efficiency advantages. To overcome this limitation, we propose \textbf{H}ierarchical \textbf{S}parse \textbf{A}ttention (HSA), a novel attention mechanism that enhances RNNs with long-range random access flexibility while preserving their merits in efficiency and length generalization. HSA divides inputs into chunks, selecting the top-$k$ chunks and hierarchically aggregates information. The core innovation lies in learning token-to-chunk relevance based on fine-grained token-level information inside each chunk. This approach enhances the precision of chunk selection across both in-domain and out-of-domain context lengths. To make HSA efficient, we further introduce a hardware-aligned kernel design. By combining HSA with Mamba, we introduce RAMba, which achieves perfect accuracy in passkey retrieval across 64 million contexts despite pre-training on only 4K-length contexts, and significant improvements on various downstream tasks, with nearly constant memory footprint. These results show RAMba's huge potential in long-context modeling.
Human2Robot: Learning Robot Actions from Paired Human-Robot Videos
Feb 23, 2025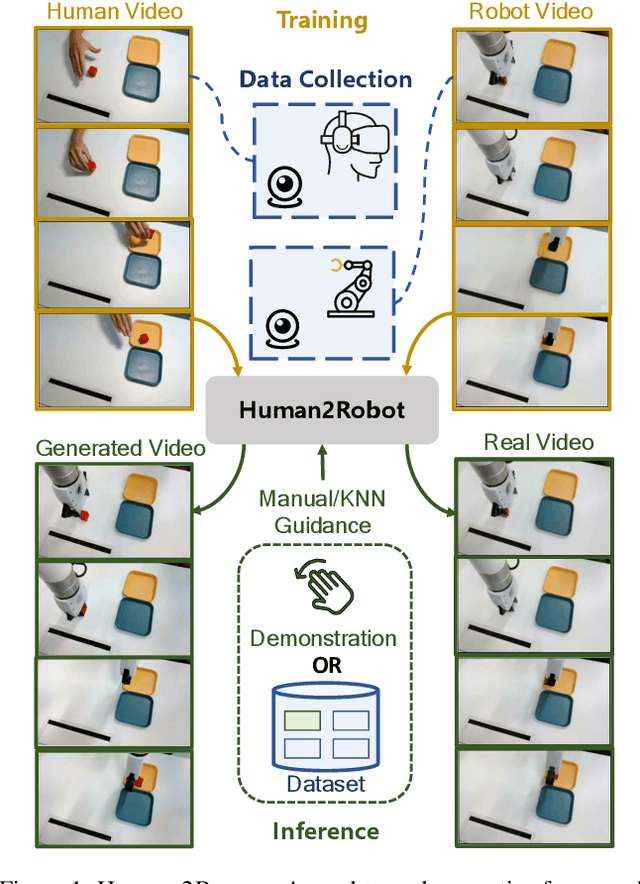
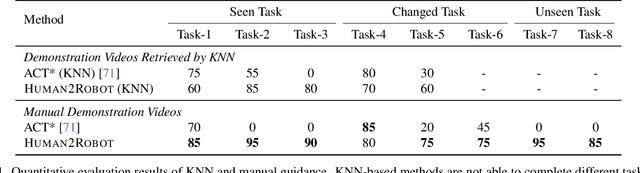
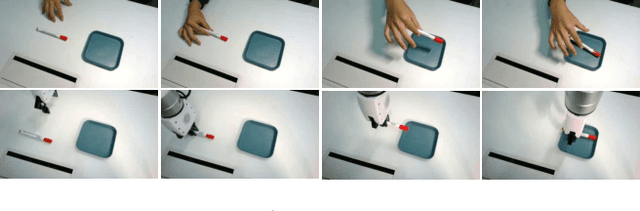
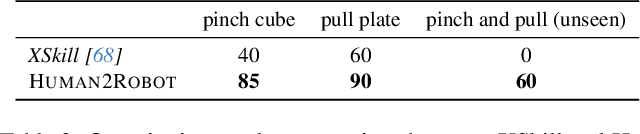
Distilling knowledge from human demonstrations is a promising way for robots to learn and act. Existing work often overlooks the differences between humans and robots, producing unsatisfactory results. In this paper, we study how perfectly aligned human-robot pairs benefit robot learning. Capitalizing on VR-based teleportation, we introduce H\&R, a third-person dataset with 2,600 episodes, each of which captures the fine-grained correspondence between human hands and robot gripper. Inspired by the recent success of diffusion models, we introduce Human2Robot, an end-to-end diffusion framework that formulates learning from human demonstrates as a generative task. Human2Robot fully explores temporal dynamics in human videos to generate robot videos and predict actions at the same time. Through comprehensive evaluations of 8 seen, changed and unseen tasks in real-world settings, we demonstrate that Human2Robot can not only generate high-quality robot videos but also excel in seen tasks and generalize to unseen objects, backgrounds and even new tasks effortlessly.
FNIN: A Fourier Neural Operator-based Numerical Integration Network for Surface-form-gradients
Jan 21, 2025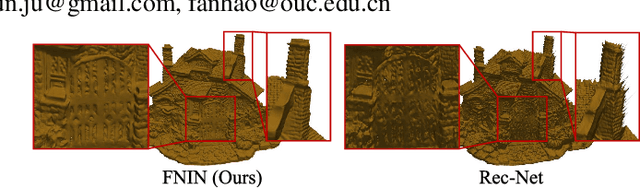
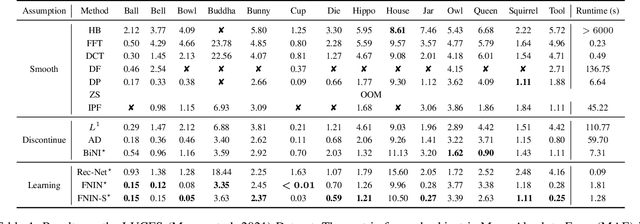
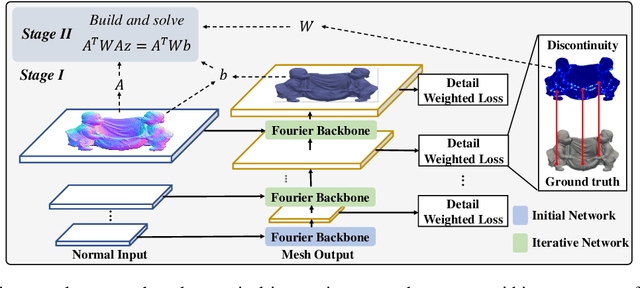
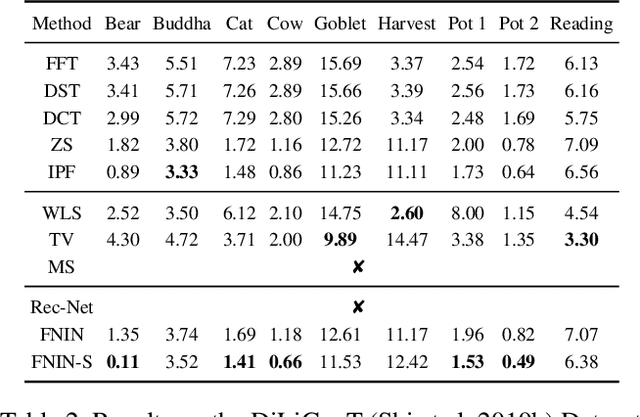
Surface-from-gradients (SfG) aims to recover a three-dimensional (3D) surface from its gradients. Traditional methods encounter significant challenges in achieving high accuracy and handling high-resolution inputs, particularly facing the complex nature of discontinuities and the inefficiencies associated with large-scale linear solvers. Although recent advances in deep learning, such as photometric stereo, have enhanced normal estimation accuracy, they do not fully address the intricacies of gradient-based surface reconstruction. To overcome these limitations, we propose a Fourier neural operator-based Numerical Integration Network (FNIN) within a two-stage optimization framework. In the first stage, our approach employs an iterative architecture for numerical integration, harnessing an advanced Fourier neural operator to approximate the solution operator in Fourier space. Additionally, a self-learning attention mechanism is incorporated to effectively detect and handle discontinuities. In the second stage, we refine the surface reconstruction by formulating a weighted least squares problem, addressing the identified discontinuities rationally. Extensive experiments demonstrate that our method achieves significant improvements in both accuracy and efficiency compared to current state-of-the-art solvers. This is particularly evident in handling high-resolution images with complex data, achieving errors of fewer than 0.1 mm on tested objects.
Differentiable Quantum Computing for Large-scale Linear Control
Nov 03, 2024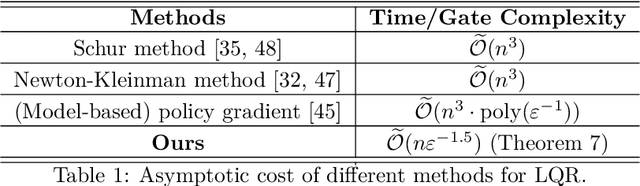
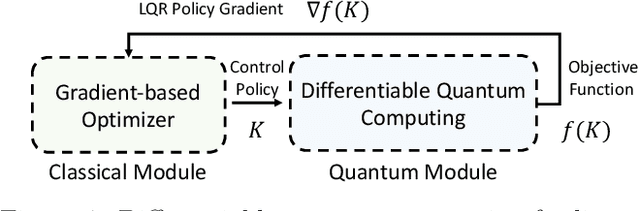
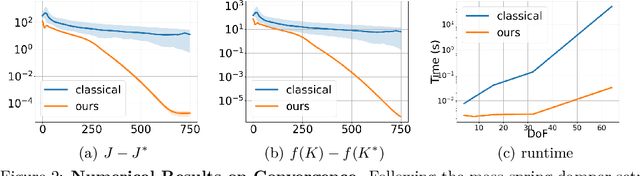
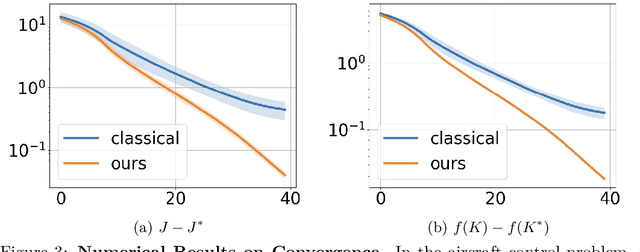
As industrial models and designs grow increasingly complex, the demand for optimal control of large-scale dynamical systems has significantly increased. However, traditional methods for optimal control incur significant overhead as problem dimensions grow. In this paper, we introduce an end-to-end quantum algorithm for linear-quadratic control with provable speedups. Our algorithm, based on a policy gradient method, incorporates a novel quantum subroutine for solving the matrix Lyapunov equation. Specifically, we build a quantum-assisted differentiable simulator for efficient gradient estimation that is more accurate and robust than classical methods relying on stochastic approximation. Compared to the classical approaches, our method achieves a super-quadratic speedup. To the best of our knowledge, this is the first end-to-end quantum application to linear control problems with provable quantum advantage.
A quantum-classical performance separation in nonconvex optimization
Nov 01, 2023



In this paper, we identify a family of nonconvex continuous optimization instances, each $d$-dimensional instance with $2^d$ local minima, to demonstrate a quantum-classical performance separation. Specifically, we prove that the recently proposed Quantum Hamiltonian Descent (QHD) algorithm [Leng et al., arXiv:2303.01471] is able to solve any $d$-dimensional instance from this family using $\widetilde{\mathcal{O}}(d^3)$ quantum queries to the function value and $\widetilde{\mathcal{O}}(d^4)$ additional 1-qubit and 2-qubit elementary quantum gates. On the other side, a comprehensive empirical study suggests that representative state-of-the-art classical optimization algorithms/solvers (including Gurobi) would require a super-polynomial time to solve such optimization instances.
Quantum Hamiltonian Descent
Mar 02, 2023



Gradient descent is a fundamental algorithm in both theory and practice for continuous optimization. Identifying its quantum counterpart would be appealing to both theoretical and practical quantum applications. A conventional approach to quantum speedups in optimization relies on the quantum acceleration of intermediate steps of classical algorithms, while keeping the overall algorithmic trajectory and solution quality unchanged. We propose Quantum Hamiltonian Descent (QHD), which is derived from the path integral of dynamical systems referring to the continuous-time limit of classical gradient descent algorithms, as a truly quantum counterpart of classical gradient methods where the contribution from classically-prohibited trajectories can significantly boost QHD's performance for non-convex optimization. Moreover, QHD is described as a Hamiltonian evolution efficiently simulatable on both digital and analog quantum computers. By embedding the dynamics of QHD into the evolution of the so-called Quantum Ising Machine (including D-Wave and others), we empirically observe that the D-Wave-implemented QHD outperforms a selection of state-of-the-art gradient-based classical solvers and the standard quantum adiabatic algorithm, based on the time-to-solution metric, on non-convex constrained quadratic programming instances up to 75 dimensions. Finally, we propose a "three-phase picture" to explain the behavior of QHD, especially its difference from the quantum adiabatic algorithm.