 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMTBench: A Multi-Scenario Cross-Modal Collaborative Evaluation Benchmark for In-Image Machine Translation
Mar 11, 2026End-to-end In-Image Machine Translation (IIMT) aims to convert text embedded within an image into a target language while preserving the original visual context, layout, and rendering style. However, existing IIMT benchmarks are largely synthetic and thus fail to reflect real-world complexity, while current evaluation protocols focus on single-modality metrics and overlook cross-modal faithfulness between rendered text and model outputs. To address these shortcomings, we present In-image Machine Translation Benchmark (IMTBench), a new benchmark of 2,500 image translation samples covering four practical scenarios and nine languages. IMTBench supports multi-aspect evaluation, including translation quality, background preservation, overall image quality, and a cross-modal alignment score that measures consistency between the translated text produced by the model and the text rendered in the translated image. We benchmark strong commercial cascade systems, and both closed- and open-source unified multi-modal models, and observe large performance gaps across scenarios and languages, especially on natural scenes and resource-limited languages, highlighting substantial headroom for end-to-end image text translation. We hope IMTBench establishes a standardized benchmark to accelerate progress in this emerging task.
Let the Agent Search: Autonomous Exploration Beats Rigid Workflows in Temporal Question Answering
Mar 02, 2026Temporal Knowledge Graph Question Answering (TKGQA) demands multi-hop reasoning under temporal constraints. Prior approaches based on large language models (LLMs) typically rely on rigid, hand-crafted retrieval workflows or costly supervised fine-tuning. We show that simply granting an off-the-shelf LLM autonomy, that is, letting it decide what to do next, already yields substantial gains even in a strict zero-shot setting. Building on this insight, we propose AT2QA, an autonomous, training-free agent for temporal question answering that iteratively interacts with the temporal knowledge graph via a general search tool for dynamic retrieval. Experiments on MultiTQ demonstrate large improvements: AT2QA achieves 88.7% Hits@1 (+10.7% over prior SOTA), including a +20.1% gain on challenging multi-target queries, showing that agentic autonomy can decisively outperform fine-tuning for temporal question answering. Code and the full set of sampled trajectories are available on https://github.com/AT2QA-Official-Code/AT2QA-Official-Code
MetricAnything: Scaling Metric Depth Pretraining with Noisy Heterogeneous Sources
Jan 29, 2026Scaling has powered recent advances in vision foundation models, yet extending this paradigm to metric depth estimation remains challenging due to heterogeneous sensor noise, camera-dependent biases, and metric ambiguity in noisy cross-source 3D data. We introduce Metric Anything, a simple and scalable pretraining framework that learns metric depth from noisy, diverse 3D sources without manually engineered prompts, camera-specific modeling, or task-specific architectures. Central to our approach is the Sparse Metric Prompt, created by randomly masking depth maps, which serves as a universal interface that decouples spatial reasoning from sensor and camera biases. Using about 20M image-depth pairs spanning reconstructed, captured, and rendered 3D data across 10000 camera models, we demonstrate-for the first time-a clear scaling trend in the metric depth track. The pretrained model excels at prompt-driven tasks such as depth completion, super-resolution and Radar-camera fusion, while its distilled prompt-free student achieves state-of-the-art results on monocular depth estimation, camera intrinsics recovery, single/multi-view metric 3D reconstruction, and VLA planning. We also show that using pretrained ViT of Metric Anything as a visual encoder significantly boosts Multimodal Large Language Model capabilities in spatial intelligence. These results show that metric depth estimation can benefit from the same scaling laws that drive modern foundation models, establishing a new path toward scalable and efficient real-world metric perception. We open-source MetricAnything at http://metric-anything.github.io/metric-anything-io/ to support community research.
GAIA: A Data Flywheel System for Training GUI Test-Time Scaling Critic Models
Jan 26, 2026While Large Vision-Language Models (LVLMs) have significantly advanced GUI agents' capabilities in parsing textual instructions, interpreting screen content, and executing tasks, a critical challenge persists: the irreversibility of agent operations, where a single erroneous action can trigger catastrophic deviations. To address this, we propose the GUI Action Critic's Data Flywheel System (GAIA), a training framework that enables the models to have iterative critic capabilities, which are used to improve the Test-Time Scaling (TTS) of basic GUI agents' performance. Specifically, we train an Intuitive Critic Model (ICM) using positive and negative action examples from a base agent first. This critic evaluates the immediate correctness of the agent's intended actions, thereby selecting operations with higher success probability. Then, the initial critic guides agent actions to collect refined positive/negative samples, initiating the self-improving cycle. The augmented data then trains a second-round critic with enhanced discernment capability. We conduct experiments on various datasets and demonstrate that the proposed ICM can improve the test-time performance of various closed-source and open-source models, and the performance can be gradually improved as the data is recycled. The code and dataset will be publicly released.
HyperClick: Advancing Reliable GUI Grounding via Uncertainty Calibration
Oct 31, 2025Autonomous Graphical User Interface (GUI) agents rely on accurate GUI grounding, which maps language instructions to on-screen coordinates, to execute user commands. However, current models, whether trained via supervised fine-tuning (SFT) or reinforcement fine-tuning (RFT), lack self-awareness of their capability boundaries, leading to overconfidence and unreliable predictions. We first systematically evaluate probabilistic and verbalized confidence in general and GUI-specific models, revealing a misalignment between confidence and actual accuracy, which is particularly critical in dynamic GUI automation tasks, where single errors can cause task failure. To address this, we propose HyperClick, a novel framework that enhances reliable GUI grounding through uncertainty calibration. HyperClick introduces a dual reward mechanism, combining a binary reward for correct actions with a truncated Gaussian-based spatial confidence modeling, calibrated using the Brier score. This approach jointly optimizes grounding accuracy and confidence reliability, fostering introspective self-criticism. Extensive experiments on seven challenge benchmarks show that HyperClick achieves state-of-the-art performance while providing well-calibrated confidence. By enabling explicit confidence calibration and introspective self-criticism, HyperClick reduces overconfidence and supports more reliable GUI automation.
BTL-UI: Blink-Think-Link Reasoning Model for GUI Agent
Sep 19, 2025In the field of AI-driven human-GUI interaction automation, while rapid advances in multimodal large language models and reinforcement fine-tuning techniques have yielded remarkable progress, a fundamental challenge persists: their interaction logic significantly deviates from natural human-GUI communication patterns. To fill this gap, we propose "Blink-Think-Link" (BTL), a brain-inspired framework for human-GUI interaction that mimics the human cognitive process between users and graphical interfaces. The system decomposes interactions into three biologically plausible phases: (1) Blink - rapid detection and attention to relevant screen areas, analogous to saccadic eye movements; (2) Think - higher-level reasoning and decision-making, mirroring cognitive planning; and (3) Link - generation of executable commands for precise motor control, emulating human action selection mechanisms. Additionally, we introduce two key technical innovations for the BTL framework: (1) Blink Data Generation - an automated annotation pipeline specifically optimized for blink data, and (2) BTL Reward -- the first rule-based reward mechanism that enables reinforcement learning driven by both process and outcome. Building upon this framework, we develop a GUI agent model named BTL-UI, which demonstrates consistent state-of-the-art performance across both static GUI understanding and dynamic interaction tasks in comprehensive benchmarks. These results provide conclusive empirical validation of the framework's efficacy in developing advanced GUI Agents.
Deep Reactive Policy: Learning Reactive Manipulator Motion Planning for Dynamic Environments
Sep 08, 2025Generating collision-free motion in dynamic, partially observable environments is a fundamental challenge for robotic manipulators. Classical motion planners can compute globally optimal trajectories but require full environment knowledge and are typically too slow for dynamic scenes. Neural motion policies offer a promising alternative by operating in closed-loop directly on raw sensory inputs but often struggle to generalize in complex or dynamic settings. We propose Deep Reactive Policy (DRP), a visuo-motor neural motion policy designed for reactive motion generation in diverse dynamic environments, operating directly on point cloud sensory input. At its core is IMPACT, a transformer-based neural motion policy pretrained on 10 million generated expert trajectories across diverse simulation scenarios. We further improve IMPACT's static obstacle avoidance through iterative student-teacher finetuning. We additionally enhance the policy's dynamic obstacle avoidance at inference time using DCP-RMP, a locally reactive goal-proposal module. We evaluate DRP on challenging tasks featuring cluttered scenes, dynamic moving obstacles, and goal obstructions. DRP achieves strong generalization, outperforming prior classical and neural methods in success rate across both simulated and real-world settings. Video results and code available at https://deep-reactive-policy.com
UniCP: A Unified Caching and Pruning Framework for Efficient Video Generation
Feb 06, 2025



Diffusion Transformers (DiT) excel in video generation but encounter significant computational challenges due to the quadratic complexity of attention. Notably, attention differences between adjacent diffusion steps follow a U-shaped pattern. Current methods leverage this property by caching attention blocks, however, they still struggle with sudden error spikes and large discrepancies. To address these issues, we propose UniCP a unified caching and pruning framework for efficient video generation. UniCP optimizes both temporal and spatial dimensions through. Error Aware Dynamic Cache Window (EDCW): Dynamically adjusts cache window sizes for different blocks at various timesteps, adapting to abrupt error changes. PCA based Slicing (PCAS) and Dynamic Weight Shift (DWS): PCAS prunes redundant attention components, and DWS integrates caching and pruning by enabling dynamic switching between pruned and cached outputs. By adjusting cache windows and pruning redundant components, UniCP enhances computational efficiency and maintains video detail fidelity. Experimental results show that UniCP outperforms existing methods in both performance and efficiency.
MoEE: Mixture of Emotion Experts for Audio-Driven Portrait Animation
Jan 03, 2025



The generation of talking avatars has achieved significant advancements in precise audio synchronization. However, crafting lifelike talking head videos requires capturing a broad spectrum of emotions and subtle facial expressions. Current methods face fundamental challenges: a)the absence of frameworks for modeling single basic emotional expressions, which restricts the generation of complex emotions such as compound emotions; b)the lack of comprehensive datasets rich in human emotional expressions, which limits the potential of models. To address these challenges, we propose the following innovations: 1)the Mixture of Emotion Experts (MoEE) model, which decouples six fundamental emotions to enable the precise synthesis of both singular and compound emotional states; 2)the DH-FaceEmoVid-150 dataset, specifically curated to include six prevalent human emotional expressions as well as four types of compound emotions, thereby expanding the training potential of emotion-driven models. Furthermore, to enhance the flexibility of emotion control, we propose an emotion-to-latents module that leverages multimodal inputs, aligning diverse control signals-such as audio, text, and labels-to ensure more varied control inputs as well as the ability to control emotions using audio alone. Through extensive quantitative and qualitative evaluations, we demonstrate that the MoEE framework, in conjunction with the DH-FaceEmoVid-150 dataset, excels in generating complex emotional expressions and nuanced facial details, setting a new benchmark in the field. These datasets will be publicly released.
Bimanual Dexterity for Complex Tasks
Nov 20, 2024
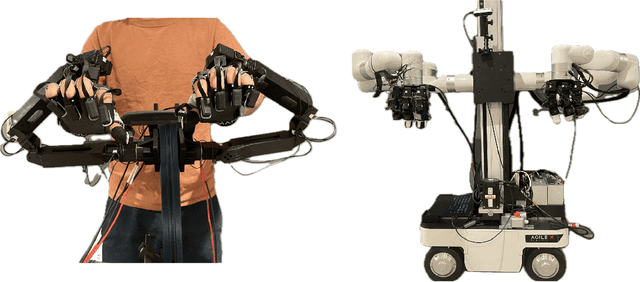

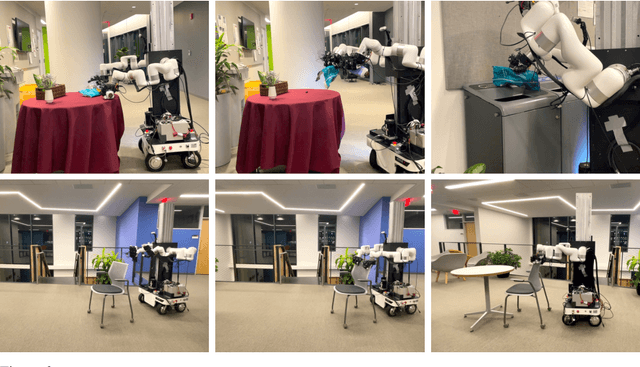
To train generalist robot policies, machine learning methods often require a substantial amount of expert human teleoperation data. An ideal robot for humans collecting data is one that closely mimics them: bimanual arms and dexterous hands. However, creating such a bimanual teleoperation system with over 50 DoF is a significant challenge. To address this, we introduce Bidex, an extremely dexterous, low-cost, low-latency and portable bimanual dexterous teleoperation system which relies on motion capture gloves and teacher arms. We compare Bidex to a Vision Pro teleoperation system and a SteamVR system and find Bidex to produce better quality data for more complex tasks at a faster rate. Additionally, we show Bidex operating a mobile bimanual robot for in the wild tasks. The robot hands (5k USD) and teleoperation system (7k USD) is readily reproducible and can be used on many robot arms including two xArms (16k USD). Website at https://bidex-teleop.github.io/