 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEarly Melanoma Diagnosis with Sequential Dermoscopic Images
Oct 12, 2021
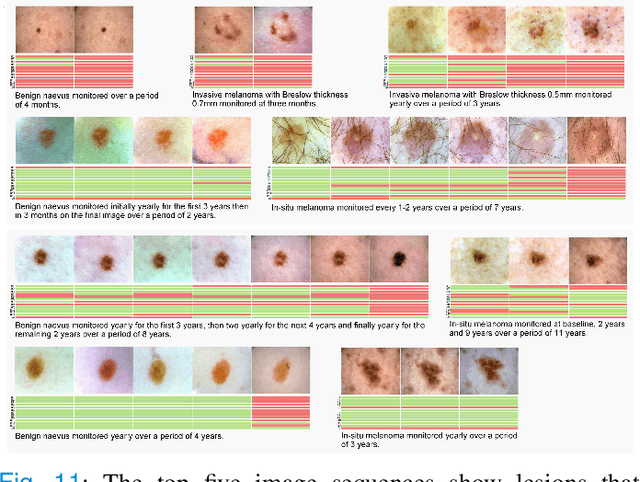
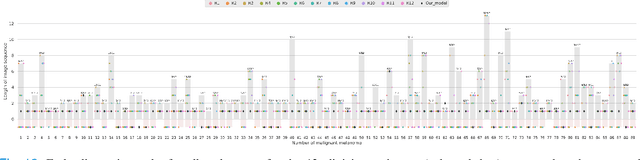
Dermatologists often diagnose or rule out early melanoma by evaluating the follow-up dermoscopic images of skin lesions. However, existing algorithms for early melanoma diagnosis are developed using single time-point images of lesions. Ignoring the temporal, morphological changes of lesions can lead to misdiagnosis in borderline cases. In this study, we propose a framework for automated early melanoma diagnosis using sequential dermoscopic images. To this end, we construct our method in three steps. First, we align sequential dermoscopic images of skin lesions using estimated Euclidean transformations, extract the lesion growth region by computing image differences among the consecutive images, and then propose a spatio-temporal network to capture the dermoscopic changes from aligned lesion images and the corresponding difference images. Finally, we develop an early diagnosis module to compute probability scores of malignancy for lesion images over time. We collected 179 serial dermoscopic imaging data from 122 patients to verify our method. Extensive experiments show that the proposed model outperforms other commonly used sequence models. We also compared the diagnostic results of our model with those of seven experienced dermatologists and five registrars. Our model achieved higher diagnostic accuracy than clinicians (63.69% vs. 54.33%, respectively) and provided an earlier diagnosis of melanoma (60.7% vs. 32.7% of melanoma correctly diagnosed on the first follow-up images). These results demonstrate that our model can be used to identify melanocytic lesions that are at high-risk of malignant transformation earlier in the disease process and thereby redefine what is possible in the early detection of melanoma.
Melanoma Diagnosis with Spatio-Temporal Feature Learning on Sequential Dermoscopic Images
Jun 19, 2020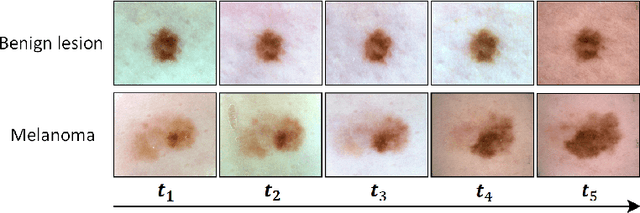
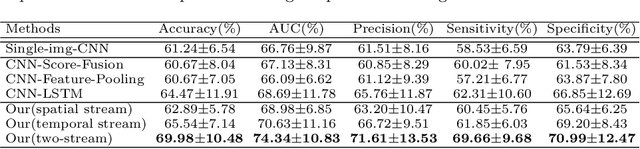
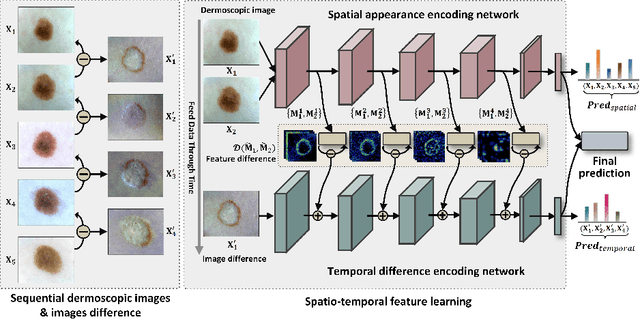
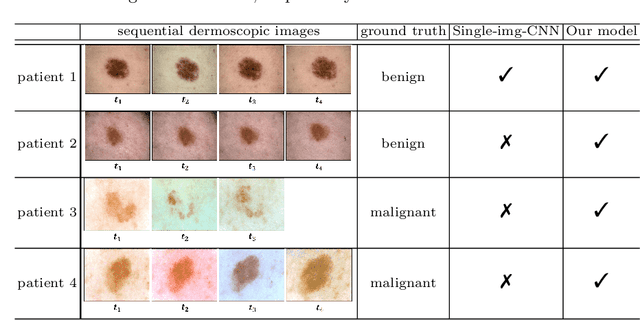
Existing studies for automated melanoma diagnosis are based on single-time point images of lesions. However, melanocytic lesions de facto are progressively evolving and, moreover, benign lesions can progress into malignant melanoma. Ignoring cross-time morphological changes of lesions thus may lead to misdiagnosis in borderline cases. Based on the fact that dermatologists diagnose ambiguous skin lesions by evaluating the dermoscopic changes over time via follow-up examination, in this study, we propose an automated framework for melanoma diagnosis using sequential dermoscopic images. To capture the spatio-temporal characterization of dermoscopic evolution, we construct our model in a two-stream network architecture which capable of simultaneously learning appearance representations of individual lesions while performing temporal reasoning on both raw pixels difference and abstract features difference. We collect 184 cases of serial dermoscopic image data, which consists of histologically confirmed 92 benign lesions and 92 melanoma lesions, to evaluate the effectiveness of the proposed method. Our model achieved AUC of 74.34%, which is ~8% higher than that of only using single images and ~6% higher than the widely used sequence learning model based on LSTM.
Bayesian Learning-Based Adaptive Control for Safety Critical Systems
Oct 05, 2019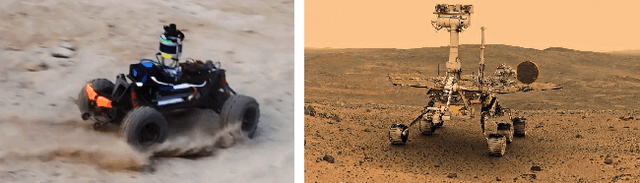

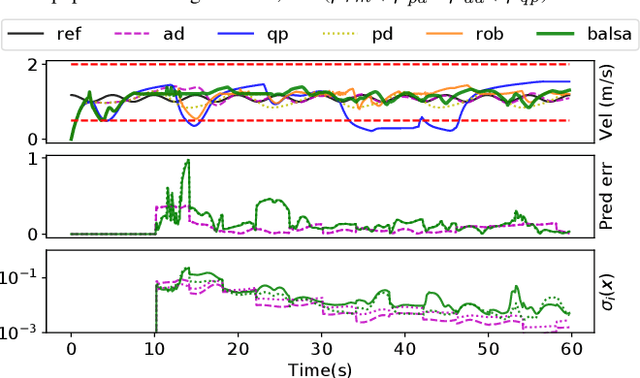
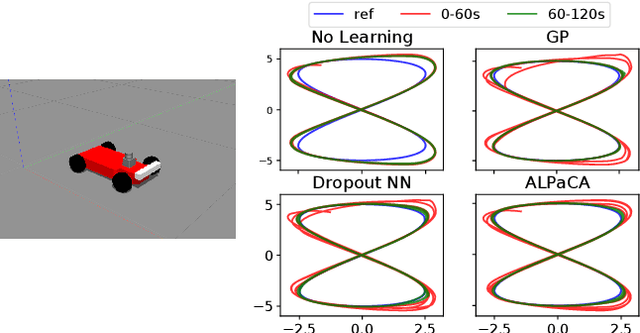
Deep learning has enjoyed much recent success, and applying state-of-the-art model learning methods to controls is an exciting prospect. However, there is a strong reluctance to use these methods on safety-critical systems, which have constraints on safety, stability, and real-time performance. We propose a framework which satisfies these constraints while allowing the use of deep neural networks for learning model uncertainties. Central to our method is the use of Bayesian model learning, which provides an avenue for maintaining appropriate degrees of caution in the face of the unknown. In the proposed approach, we develop an adaptive control framework leveraging the theory of stochastic CLFs (Control Lypunov Functions) and stochastic CBFs (Control Barrier Functions) along with tractable Bayesian model learning via Gaussian Processes or Bayesian neural networks. Under reasonable assumptions, we guarantee stability and safety while adapting to unknown dynamics with probability 1. We demonstrate this architecture for high-speed terrestrial mobility targeting potential applications in safety-critical high-speed Mars rover missions.
Flower Interaction Subsystem for a Precision Pollination Robot
Jun 21, 2019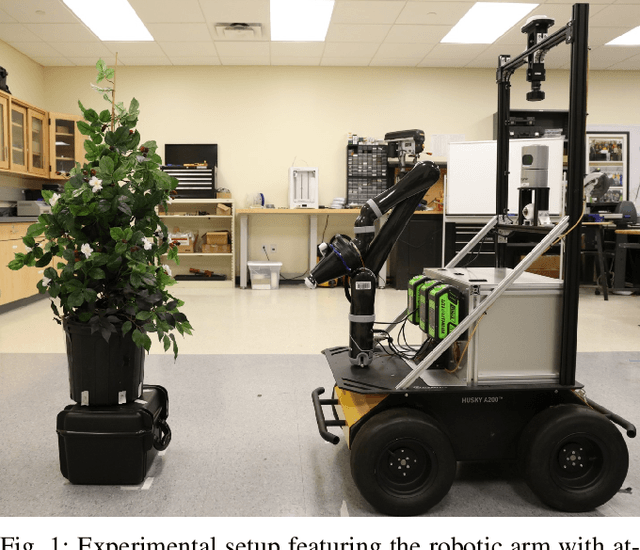
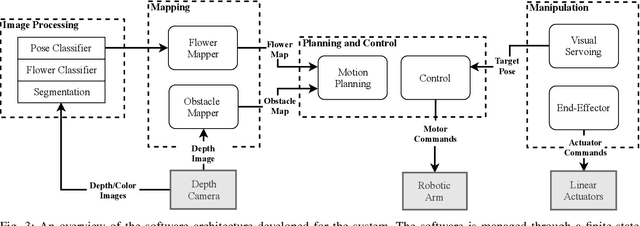
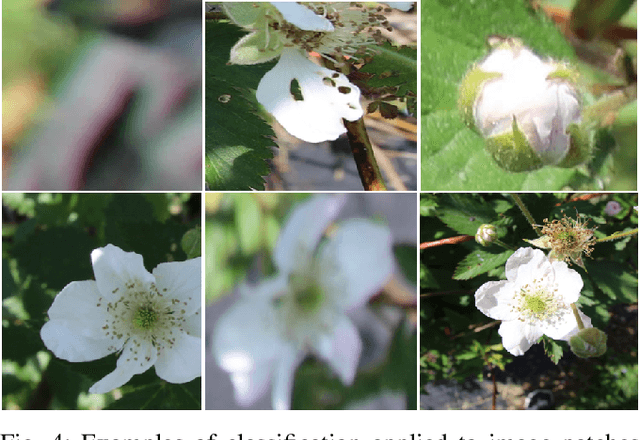
Robotic pollinators not only can aid farmers by providing more cost effective and stable methods for pollinating plants but also benefit crop production in environments not suitable for bees such as greenhouses, growth chambers, and in outer space. Robotic pollination requires a high degree of precision and autonomy but few systems have addressed both of these aspects in practice. In this paper, a fully autonomous robot is presented, capable of precise pollination of individual small flowers. Experimental results show that the proposed system is able to achieve a 93.1% detection accuracy and a 76.9% 'pollination' success rate tested with high-fidelity artificial flowers.
Design of an Autonomous Precision Pollination Robot
Aug 29, 2018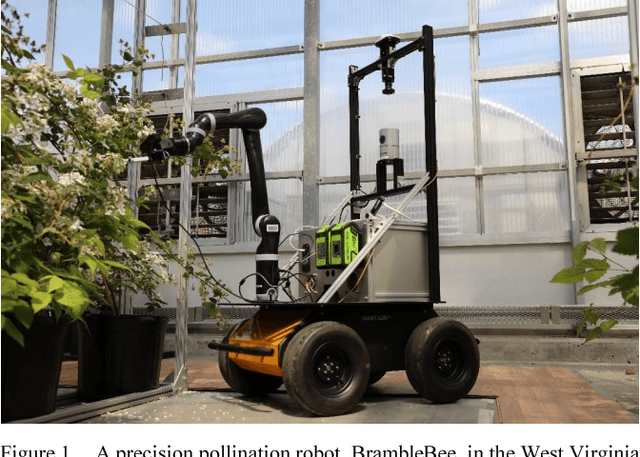

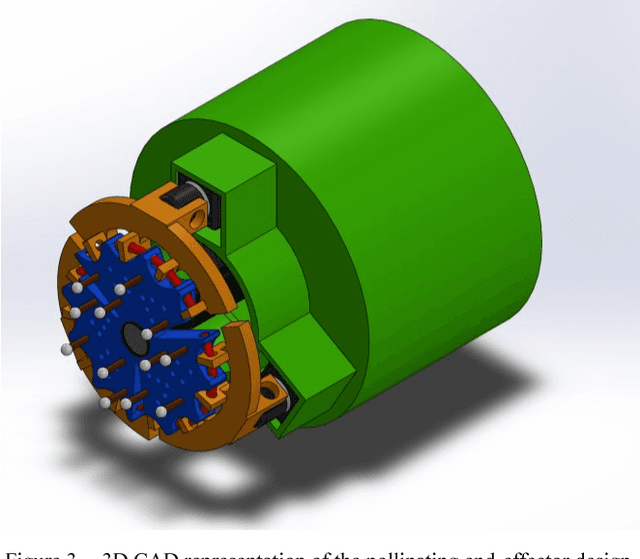
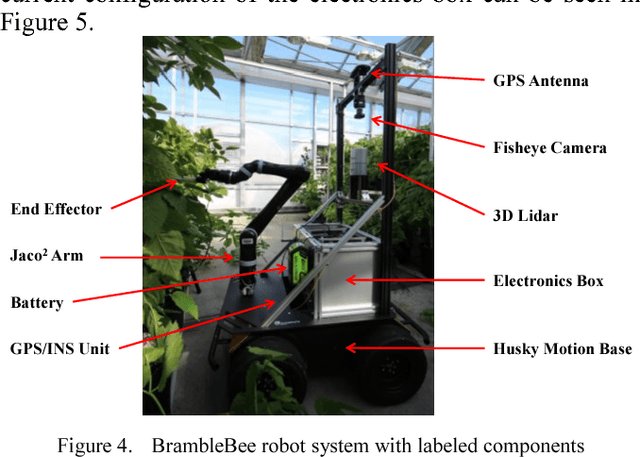
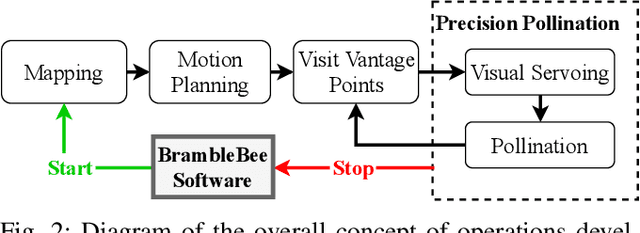
Precision robotic pollination systems can not only fill the gap of declining natural pollinators, but can also surpass them in efficiency and uniformity, helping to feed the fast-growing human population on Earth. This paper presents the design and ongoing development of an autonomous robot named "BrambleBee", which aims at pollinating bramble plants in a greenhouse environment. Partially inspired by the ecology and behavior of bees, BrambleBee employs state-of-the-art localization and mapping, visual perception, path planning, motion control, and manipulation techniques to create an efficient and robust autonomous pollination system.
Content-boosted Matrix Factorization Techniques for Recommender Systems
Jan 04, 2013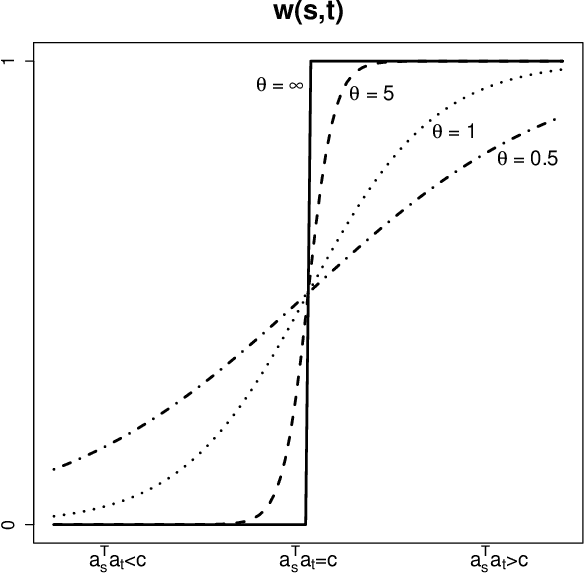

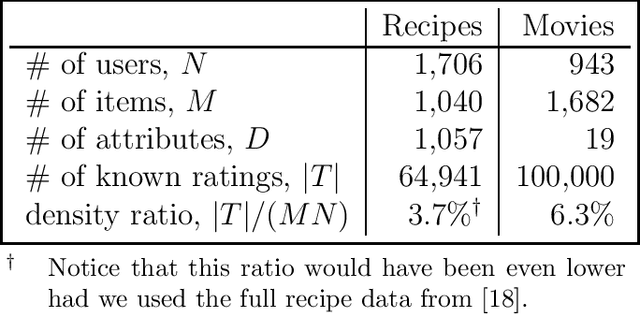

Many businesses are using recommender systems for marketing outreach. Recommendation algorithms can be either based on content or driven by collaborative filtering. We study different ways to incorporate content information directly into the matrix factorization approach of collaborative filtering. These content-boosted matrix factorization algorithms not only improve recommendation accuracy, but also provide useful insights about the contents, as well as make recommendations more easily interpretable.