 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Stickbug: a Six-Armed Precision Pollination Robot
Apr 04, 2024



This work presents the design of Stickbug, a six-armed, multi-agent, precision pollination robot that combines the accuracy of single-agent systems with swarm parallelization in greenhouses. Precision pollination robots have often been proposed to offset the effects of a decreasing population of natural pollinators, but they frequently lack the required parallelization and scalability. Stickbug achieves this by allowing each arm and drive base to act as an individual agent, significantly reducing planning complexity. Stickbug uses a compact holonomic Kiwi drive to navigate narrow greenhouse rows, a tall mast to support multiple manipulators and reach plant heights, a detection model and classifier to identify Bramble flowers, and a felt-tipped end-effector for contact-based pollination. Initial experimental validation demonstrates that Stickbug can attempt over 1.5 pollinations per minute with a 50% success rate. Additionally, a Bramble flower perception dataset was created and is publicly available alongside Stickbug's software and design files.
Rhino: An Autonomous Robot for Mapping Underground Mine Environments
May 11, 2023
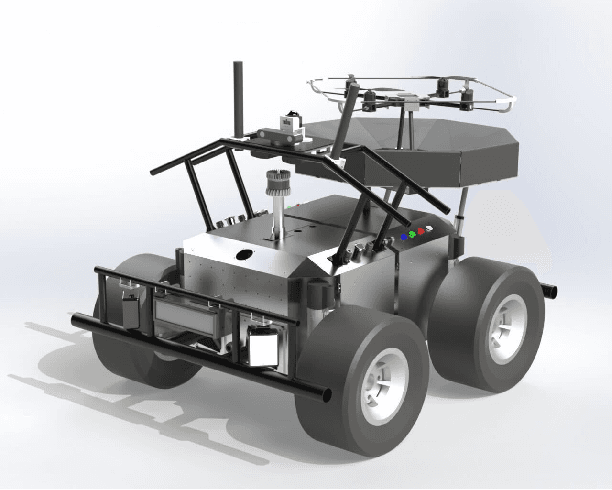
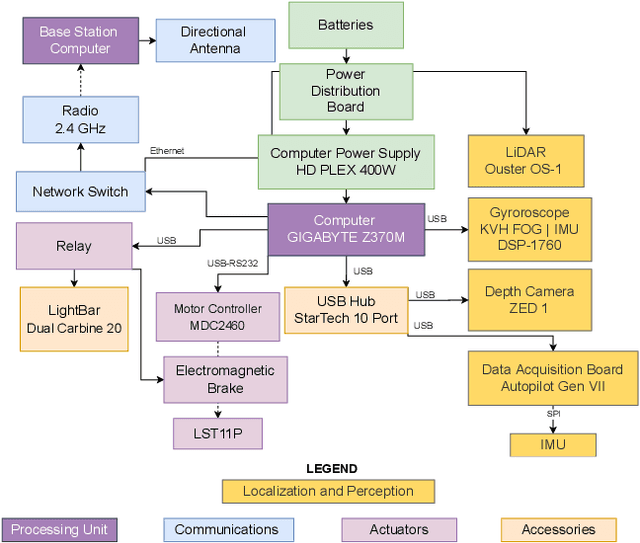
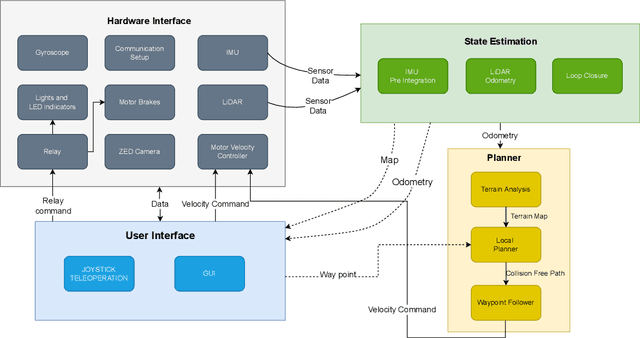
There are many benefits for exploring and exploiting underground mines, but there are also significant risks and challenges. One such risk is the potential for accidents caused by the collapse of the pillars, and roofs which can be mitigated through inspections. However, these inspections can be costly and may put the safety of the inspectors at risk. To address this issue, this work presents Rhino, an autonomous robot that can navigate underground mine environments and generate 3D maps. These generated maps will allow mine workers to proactively respond to potential hazards and prevent accidents. The system being developed is a skid-steer, four-wheeled unmanned ground vehicle (UGV) that uses a LiDAR and IMU to perform long-duration autonomous navigation and generation of maps through a LIO-SAM framework. The system has been tested in different environments and terrains to ensure its robustness and ability to operate for extended periods of time while also generating 3D maps.
Flower Interaction Subsystem for a Precision Pollination Robot
Jun 21, 2019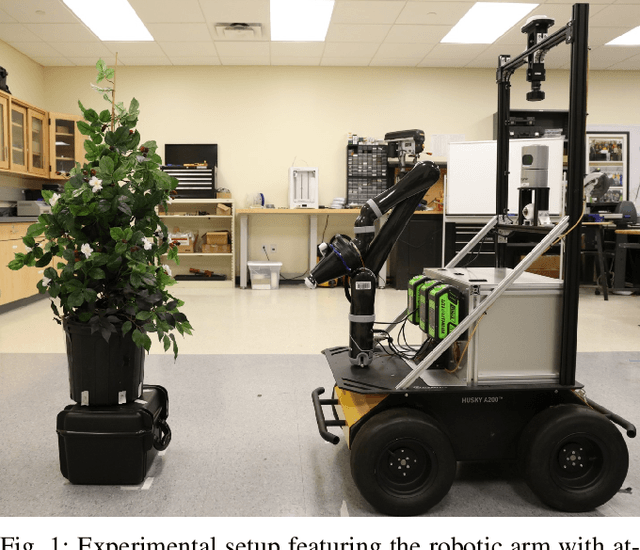
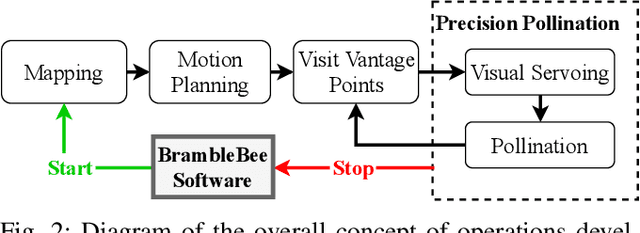
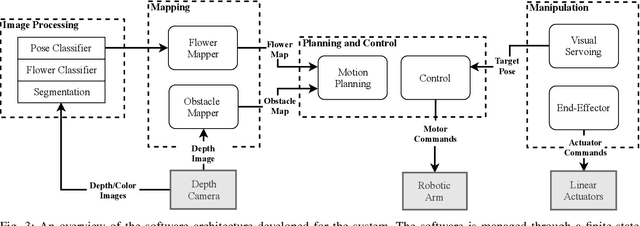
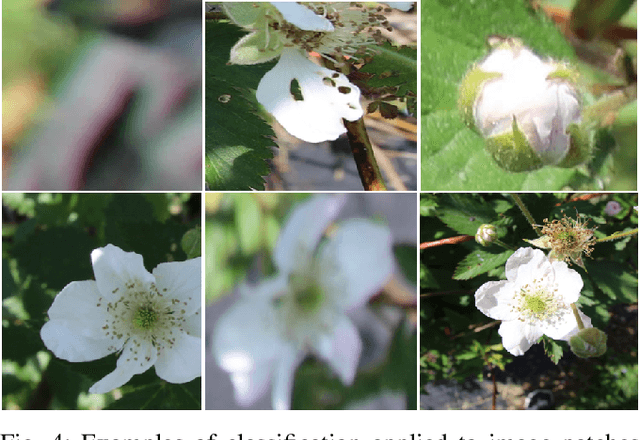
Robotic pollinators not only can aid farmers by providing more cost effective and stable methods for pollinating plants but also benefit crop production in environments not suitable for bees such as greenhouses, growth chambers, and in outer space. Robotic pollination requires a high degree of precision and autonomy but few systems have addressed both of these aspects in practice. In this paper, a fully autonomous robot is presented, capable of precise pollination of individual small flowers. Experimental results show that the proposed system is able to achieve a 93.1% detection accuracy and a 76.9% 'pollination' success rate tested with high-fidelity artificial flowers.