 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConvex Maneuver Planning for Spacecraft Collision Avoidance
Oct 21, 2025Conjunction analysis and maneuver planning for spacecraft collision avoidance remains a manual and time-consuming process, typically involving repeated forward simulations of hand-designed maneuvers. With the growing density of satellites in low-Earth orbit (LEO), autonomy is becoming essential for efficiently evaluating and mitigating collisions. In this work, we present an algorithm to design low-thrust collision-avoidance maneuvers for short-term conjunction events. We first formulate the problem as a nonconvex quadratically-constrained quadratic program (QCQP), which we then relax into a convex semidefinite program (SDP) using Shor's relaxation. We demonstrate empirically that the relaxation is tight, which enables the recovery of globally optimal solutions to the original nonconvex problem. Our formulation produces a minimum-energy solution while ensuring a desired probability of collision at the time of closest approach. Finally, if the desired probability of collision cannot be satisfied, we relax this constraint into a penalty, yielding a minimum-risk solution. We validate our algorithm with a high-fidelity simulation of a satellite conjunction in low-Earth orbit with a simulated conjunction data message (CDM), demonstrating its effectiveness in reducing collision risk.
Preliminary Design of the Dragonfly Navigation Filter
Aug 02, 2023



Dragonfly is scheduled to begin exploring Titan by 2034 using a series of multi-kilometer surface flights. This paper outlines the preliminary design of the navigation filter for the Dragonfly Mobility subsystem. The software architecture and filter formulation for lidar, visual odometry, pressure sensors, and redundant IMUs are described in detail. Special discussion is given to developments to achieve multi-kilometer surface flights, including optimizing sequential image baselines, modeling correlating image processing errors, and an efficient approximation to the Simultaneous Localization and Mapping (SLAM) problem.
A Comparison of Robust Kalman Filters for Improving Wheel-Inertial Odometry in Planetary Rovers
Dec 15, 2021
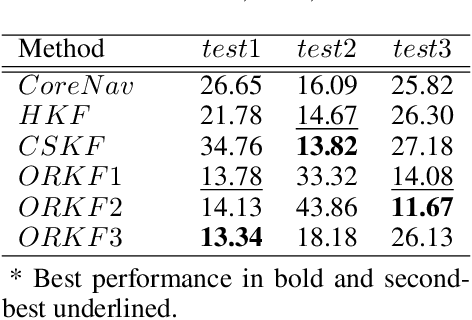
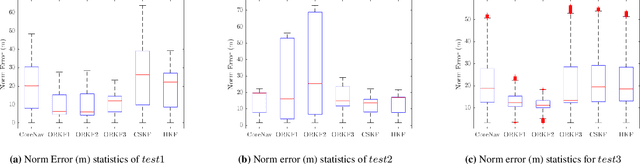
This paper compares the performance of adaptive and robust Kalman filter algorithms in improving wheel-inertial odometry on low featured rough terrain. Approaches include classical adaptive and robust methods as well as variational methods, which are evaluated experimentally on a wheeled rover in terrain similar to what would be encountered in planetary exploration. Variational filters show improved solution accuracy compared to the classical adaptive filters and are able to handle erroneous wheel odometry measurements and keep good localization for longer distances without significant drift. We also show how varying the parameters affects localization performance.
Review of Factor Graphs for Robust GNSS Applications
Dec 14, 2021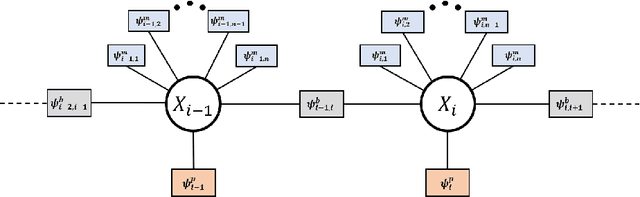
Factor graphs have recently emerged as an alternative solution method for GNSS positioning. In this article, we review how factor graphs are implemented in GNSS, some of their advantages over Kalman Filters, and their importance in making positioning solutions more robust to degraded measurements. We also talk about how factor graphs can be an important tool for the field radio-navigation community.
ZUPT Aided GNSS Factor Graph with Inertial Navigation Integration for Wheeled Robots
Dec 14, 2021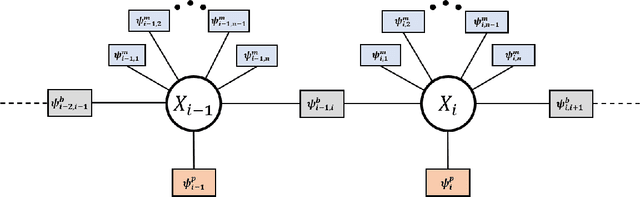
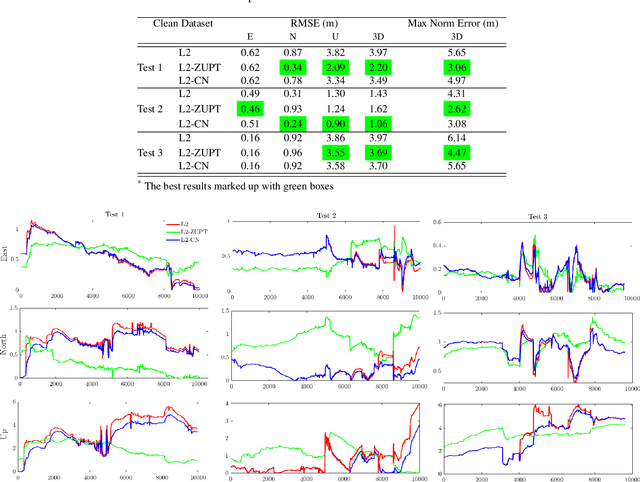
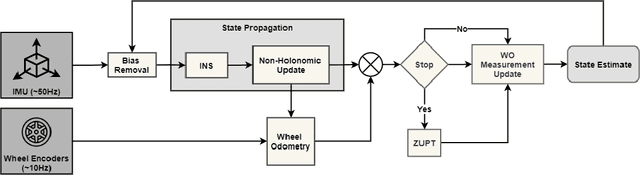
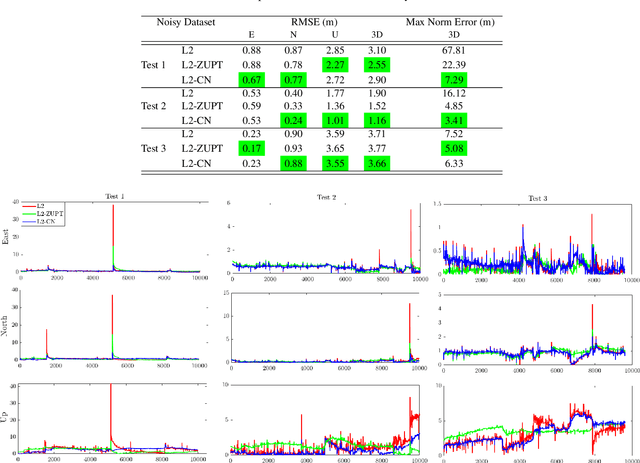
In this work, we demonstrate the importance of zero velocity information for global navigation satellite system (GNSS) based navigation. The effectiveness of using the zero velocity information with zero velocity update (ZUPT) for inertial navigation applications have been shown in the literature. Here we leverage this information and add it as a position constraint in a GNSS factor graph. We also compare its performance to a GNSS/inertial navigation system (INS) coupled factor graph. We tested our ZUPT aided factor graph method on three datasets and compared it with the GNSS-only factor graph.
Flower Interaction Subsystem for a Precision Pollination Robot
Jun 21, 2019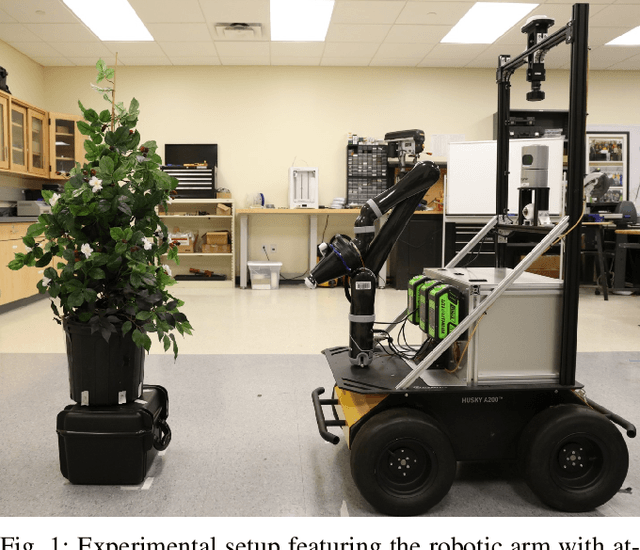
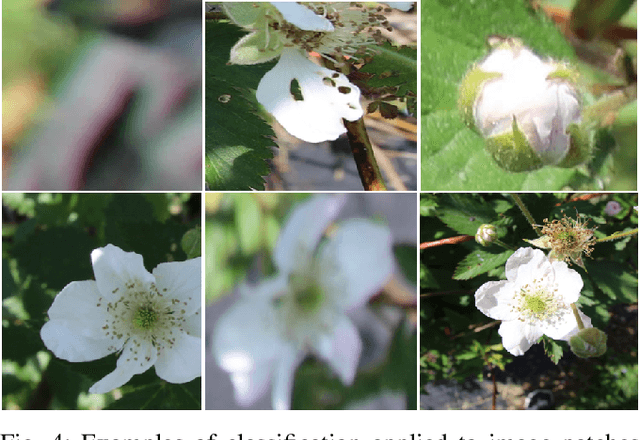
Robotic pollinators not only can aid farmers by providing more cost effective and stable methods for pollinating plants but also benefit crop production in environments not suitable for bees such as greenhouses, growth chambers, and in outer space. Robotic pollination requires a high degree of precision and autonomy but few systems have addressed both of these aspects in practice. In this paper, a fully autonomous robot is presented, capable of precise pollination of individual small flowers. Experimental results show that the proposed system is able to achieve a 93.1% detection accuracy and a 76.9% 'pollination' success rate tested with high-fidelity artificial flowers.
Improved Planetary Rover Inertial Navigation and Wheel Odometry Performance through Periodic Use of Zero-Type Constraints
Jun 20, 2019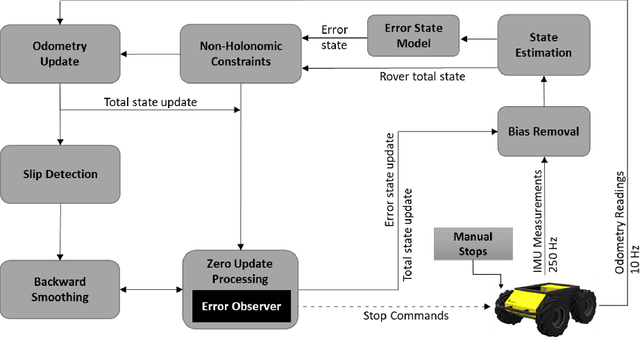

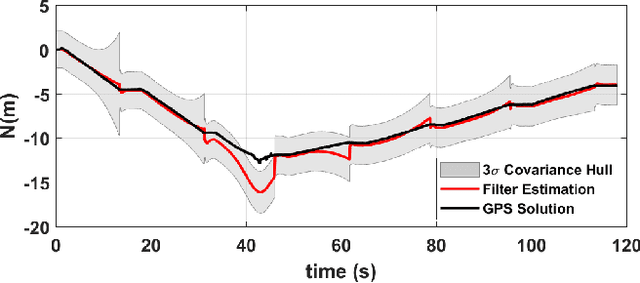
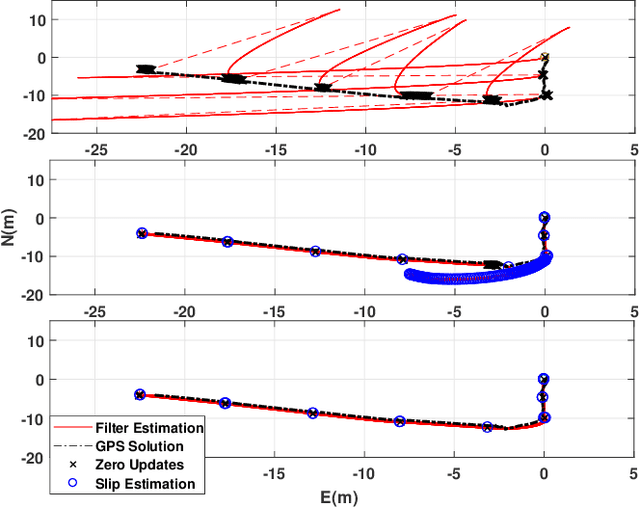
We present an approach to enhance wheeled planetary rover dead-reckoning localization performance by leveraging the use of zero-type constraint equations in the navigation filter. Without external aiding, inertial navigation solutions inherently exhibit cubic error growth. Furthermore, for planetary rovers that are traversing diverse types of terrain, wheel odometry is often unreliable for use in localization, due to wheel slippage. For current Mars rovers, computer vision-based approaches are generally used whenever there is a high possibility of positioning error; however, these strategies require additional computational power, energy resources, and significantly slow down the rover traverse speed. To this end, we propose a navigation approach that compensates for the high likelihood of odometry errors by providing a reliable navigation solution that leverages non-holonomic vehicle constraints as well as state-aware pseudo-measurements (e.g., zero velocity and zero angular rate) updates during periodic stops. By using this, computationally expensive visual-based corrections could be performed less often. Experimental tests that compare against GPS-based localization are used to demonstrate the accuracy of the proposed approach. The source code, post-processing scripts, and example datasets associated with the paper are published in a public repository.
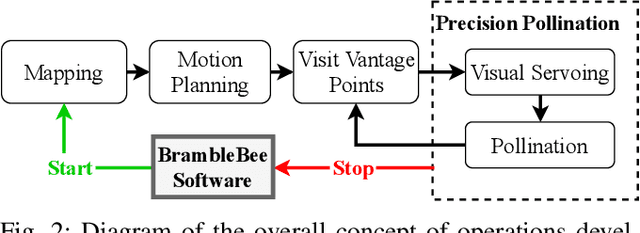
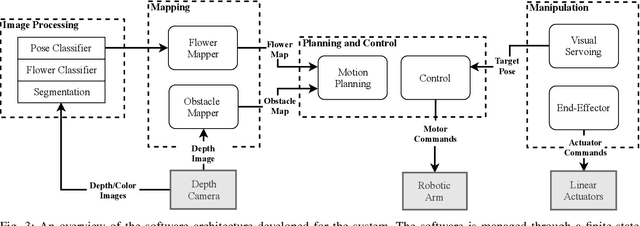
Design of an Autonomous Precision Pollination Robot
Aug 29, 2018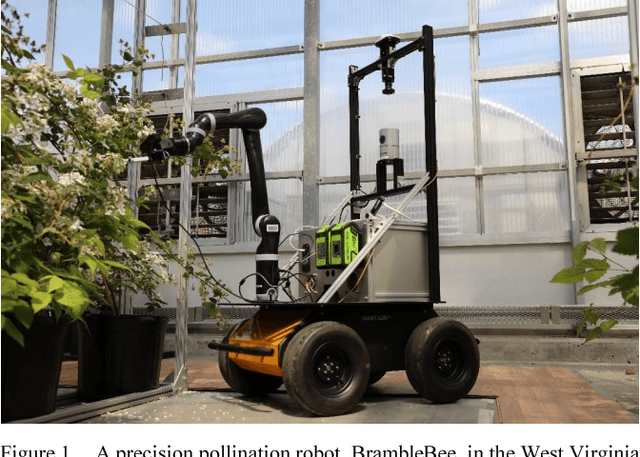

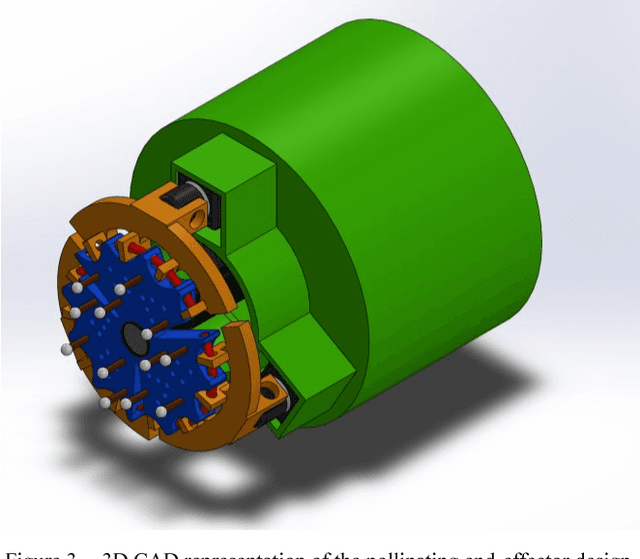
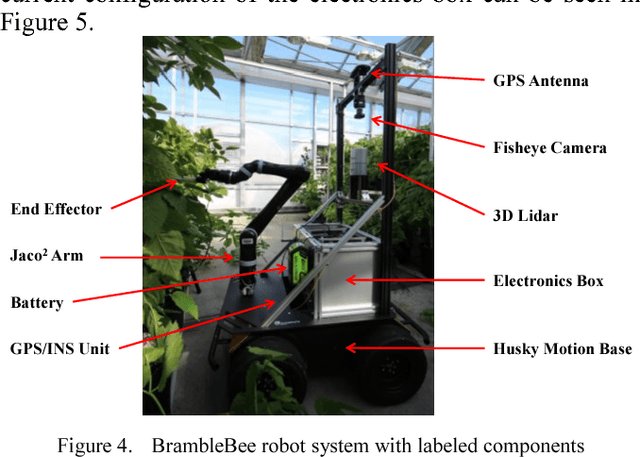
Precision robotic pollination systems can not only fill the gap of declining natural pollinators, but can also surpass them in efficiency and uniformity, helping to feed the fast-growing human population on Earth. This paper presents the design and ongoing development of an autonomous robot named "BrambleBee", which aims at pollinating bramble plants in a greenhouse environment. Partially inspired by the ecology and behavior of bees, BrambleBee employs state-of-the-art localization and mapping, visual perception, path planning, motion control, and manipulation techniques to create an efficient and robust autonomous pollination system.