 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Rock Pushability on Rough Planetary Terrain
May 14, 2025



In the context of mobile navigation in unstructured environments, the predominant approach entails the avoidance of obstacles. The prevailing path planning algorithms are contingent upon deviating from the intended path for an indefinite duration and returning to the closest point on the route after the obstacle is left behind spatially. However, avoiding an obstacle on a path that will be used repeatedly by multiple agents can hinder long-term efficiency and lead to a lasting reliance on an active path planning system. In this study, we propose an alternative approach to mobile navigation in unstructured environments by leveraging the manipulation capabilities of a robotic manipulator mounted on top of a mobile robot. Our proposed framework integrates exteroceptive and proprioceptive feedback to assess the push affordance of obstacles, facilitating their repositioning rather than avoidance. While our preliminary visual estimation takes into account the characteristics of both the obstacle and the surface it relies on, the push affordance estimation module exploits the force feedback obtained by interacting with the obstacle via a robotic manipulator as the guidance signal. The objective of our navigation approach is to enhance the efficiency of routes utilized by multiple agents over extended periods by reducing the overall time spent by a fleet in environments where autonomous infrastructure development is imperative, such as lunar or Martian surfaces.
Analysis of the Unscented Transform for Cooperative Localization with Ranging-Only Information
Apr 09, 2025Cooperative localization in multi-agent robotic systems is challenging, especially when agents rely on limited information, such as only peer-to-peer range measurements. Two key challenges arise: utilizing this limited information to improve position estimation; handling uncertainties from sensor noise, nonlinearity, and unknown correlations between agents measurements; and avoiding information reuse. This paper examines the use of the Unscented Transform (UT) for state estimation for a case in which range measurement between agents and covariance intersection (CI) is used to handle unknown correlations. Unlike Kalman Filter approaches, CI methods fuse complete state and covariance estimates. This makes formulating a CI approach with ranging-only measurements a challenge. To overcome this, UT is used to handle uncertainties and formulate a cooperative state update using range measurements and current cooperative state estimates. This introduces information reuse in the measurement update. Therefore, this work aims to evaluate the limitations and utility of this formulation when faced with various levels of state measurement uncertainty and errors.
Evaluation of the Benefits of Zero Velocity Update in Decentralized EKF-Based Cooperative Localization Algorithms for GNSS-Denied Multi-Robot Systems
Jun 30, 2023



This paper proposes the cooperative use of zero velocity update (ZU) in a decentralized extended Kalman filter (DEKF) based localization algorithm for multi-robot systems. The filter utilizes inertial measurement unit (IMU), ultra-wideband (UWB), and odometry velocity measurements to improve the localization performance of the system in the presence of a GNSS-denied environment. The contribution of this work is to evaluate the benefits of using ZU in a DEKF-based localization algorithm. The algorithm is tested with real hardware in a video motion capture facility and a Robot Operating System (ROS) based simulation environment for unmanned ground vehicles (UGV). Both simulation and real-world experiments are performed to show the effectiveness of using ZU in one robot to reinstate the localization of other robots in a multi-robot system. Experimental results from GNSS-denied simulation and real-world environments show that using ZU with simple heuristics in the DEKF significantly improves the 3D localization accuracy.
Proprioceptive Slip Detection for Planetary Rovers in Perceptually Degraded Extraterrestrial Environments
Jul 29, 2022
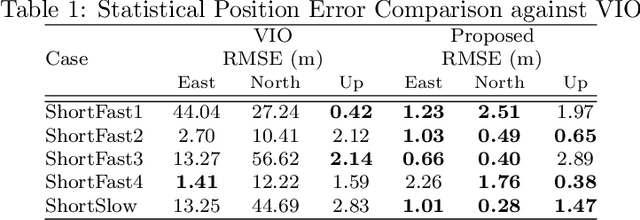
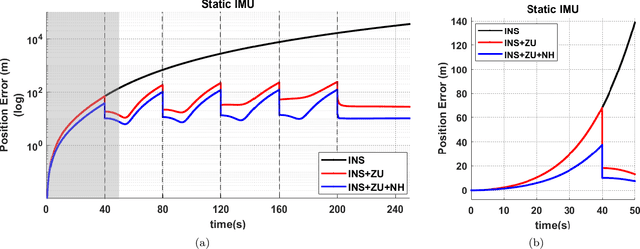
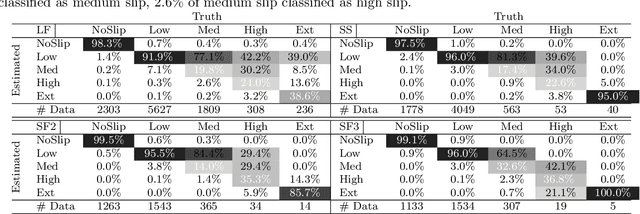
Slip detection is of fundamental importance for the safety and efficiency of rovers driving on the surface of extraterrestrial bodies. Current planetary rover slip detection systems rely on visual perception on the assumption that sufficient visual features can be acquired in the environment. However, visual-based methods are prone to suffer in perceptually degraded planetary environments with dominant low terrain features such as regolith, glacial terrain, salt-evaporites, and poor lighting conditions such as dark caves and permanently shadowed regions. Relying only on visual sensors for slip detection also requires additional computational power and reduces the rover traversal rate. This paper answers the question of how to detect wheel slippage of a planetary rover without depending on visual perception. In this respect, we propose a slip detection system that obtains its information from a proprioceptive localization framework that is capable of providing reliable, continuous, and computationally efficient state estimation over hundreds of meters. This is accomplished by using zero velocity update, zero angular rate update, and non-holonomic constraints as pseudo-measurement updates on an inertial navigation system framework. The proposed method is evaluated on actual hardware and field-tested in a planetary-analog environment. The method achieves greater than 92% slip detection accuracy for distances around 150 m using only an IMU and wheel encoders.
A Comparison of Robust Kalman Filters for Improving Wheel-Inertial Odometry in Planetary Rovers
Dec 15, 2021
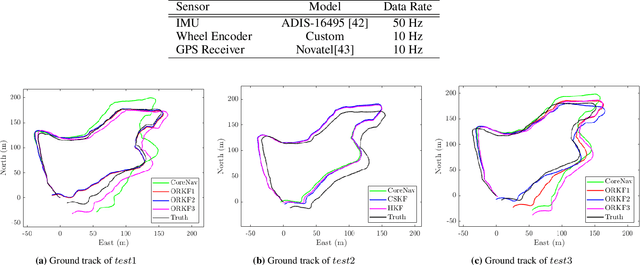
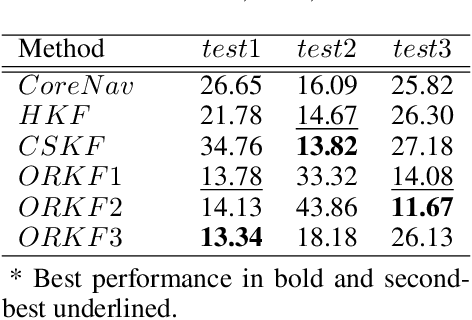
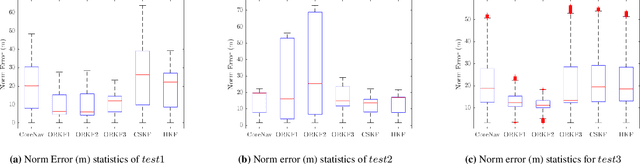
This paper compares the performance of adaptive and robust Kalman filter algorithms in improving wheel-inertial odometry on low featured rough terrain. Approaches include classical adaptive and robust methods as well as variational methods, which are evaluated experimentally on a wheeled rover in terrain similar to what would be encountered in planetary exploration. Variational filters show improved solution accuracy compared to the classical adaptive filters and are able to handle erroneous wheel odometry measurements and keep good localization for longer distances without significant drift. We also show how varying the parameters affects localization performance.
ZUPT Aided GNSS Factor Graph with Inertial Navigation Integration for Wheeled Robots
Dec 14, 2021
In this work, we demonstrate the importance of zero velocity information for global navigation satellite system (GNSS) based navigation. The effectiveness of using the zero velocity information with zero velocity update (ZUPT) for inertial navigation applications have been shown in the literature. Here we leverage this information and add it as a position constraint in a GNSS factor graph. We also compare its performance to a GNSS/inertial navigation system (INS) coupled factor graph. We tested our ZUPT aided factor graph method on three datasets and compared it with the GNSS-only factor graph.
NASA Space Robotics Challenge 2 Qualification Round: An Approach to Autonomous Lunar Rover Operations
Sep 20, 2021
Plans for establishing a long-term human presence on the Moon will require substantial increases in robot autonomy and multi-robot coordination to support establishing a lunar outpost. To achieve these objectives, algorithm design choices for the software developments need to be tested and validated for expected scenarios such as autonomous in-situ resource utilization (ISRU), localization in challenging environments, and multi-robot coordination. However, real-world experiments are extremely challenging and limited for extraterrestrial environment. Also, realistic simulation demonstrations in these environments are still rare and demanded for initial algorithm testing capabilities. To help some of these needs, the NASA Centennial Challenges program established the Space Robotics Challenge Phase 2 (SRC2) which consist of virtual robotic systems in a realistic lunar simulation environment, where a group of mobile robots were tasked with reporting volatile locations within a global map, excavating and transporting these resources, and detecting and localizing a target of interest. The main goal of this article is to share our team's experiences on the design trade-offs to perform autonomous robotic operations in a virtual lunar environment and to share strategies to complete the mission requirements posed by NASA SRC2 competition during the qualification round. Of the 114 teams that registered for participation in the NASA SRC2, team Mountaineers finished as one of only six teams to receive the top qualification round prize.
Slip-Based Autonomous ZUPT through Gaussian Process to Improve Planetary Rover Localization
Mar 13, 2021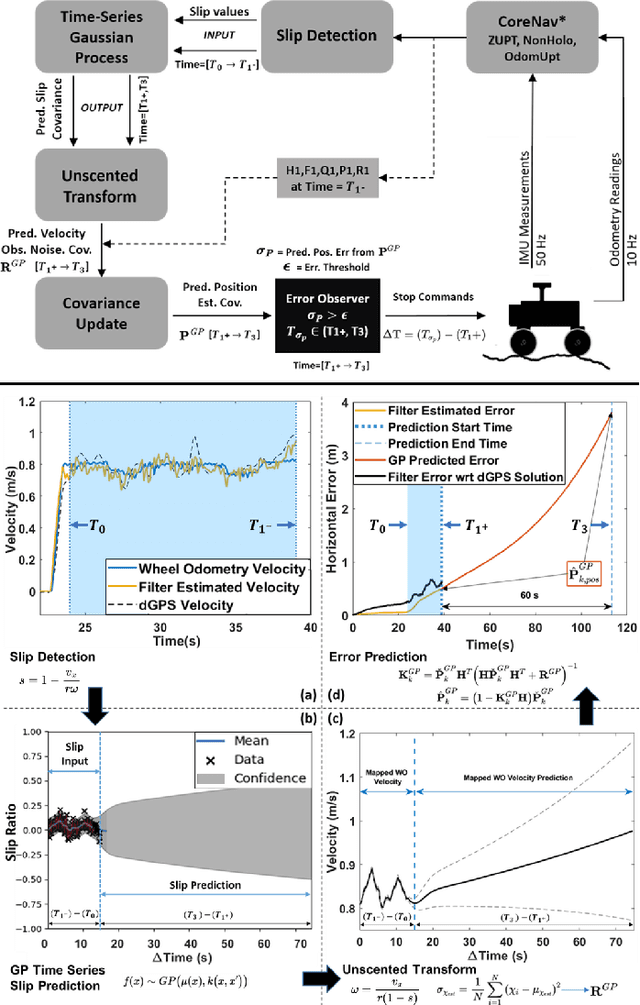
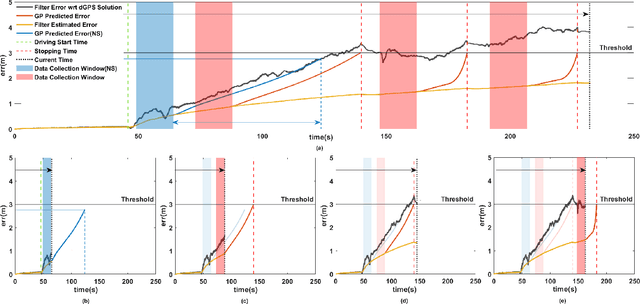
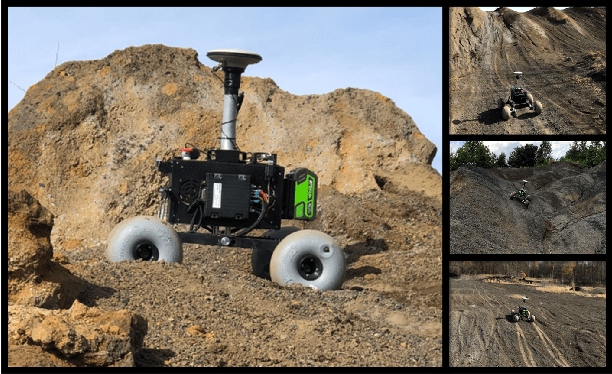
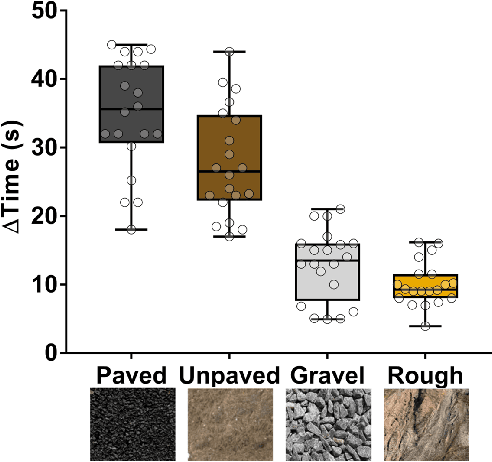
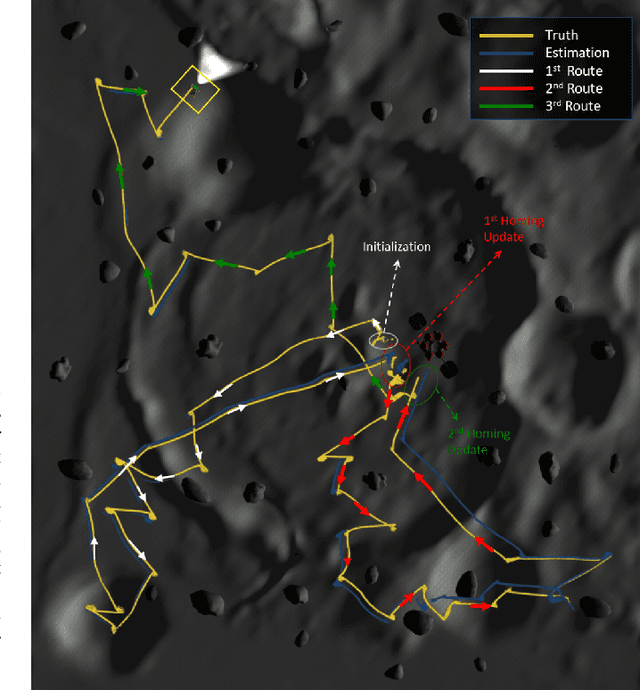
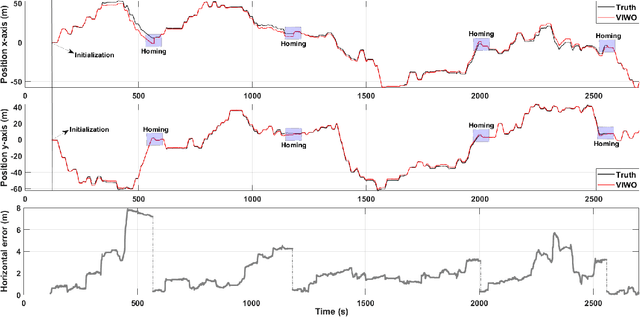
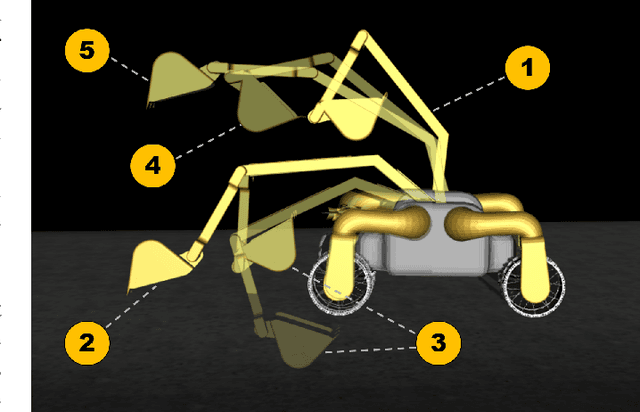
The zero-velocity update (ZUPT) algorithm provides valuable state information to maintain the inertial navigation system (INS) reliability when stationary conditions are satisfied. Employing ZUPT along with leveraging non-holonomic constraints can greatly benefit wheeled mobile robot dead-reckoning localization accuracy. However, determining how often they should be employed requires consideration to balance localization accuracy and traversal rate for planetary rovers. To address this, we investigate when to autonomously initiate stops to improve wheel-inertial odometry (WIO) localization performance with ZUPT. To do this, we propose a 3D dead-reckoning approach that predicts wheel slippage while the rover is in motion and forecasts the appropriate time to stop without changing any rover hardware or major rover operations. We validate with field tests that our approach is viable on different terrain types and achieves a 3D localization accuracy of more than 97% over 650 m drives on rough terrain.
* 8 pages, 6 figures, 2 tables
Team Mountaineers Space Robotic Challenge Phase-2 Qualification Round Preparation Report
Mar 22, 2020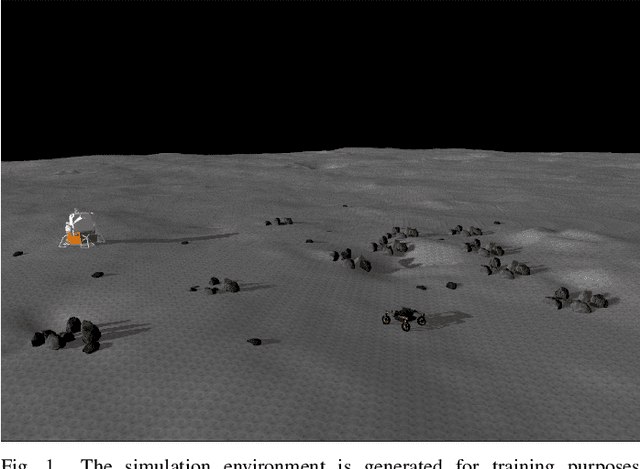
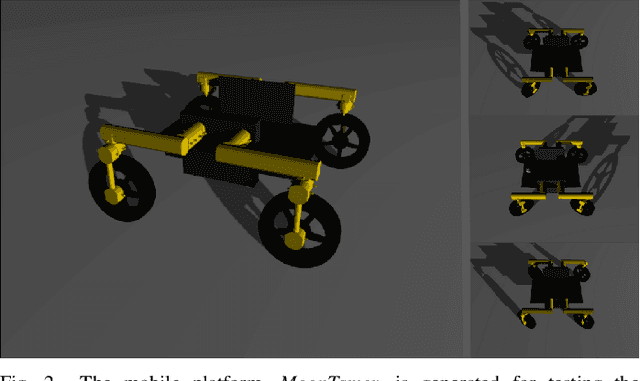
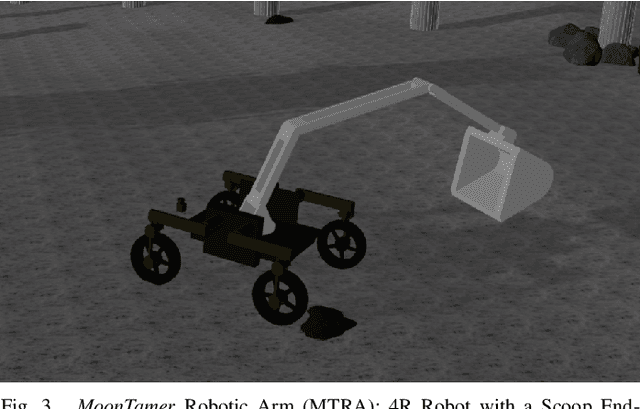
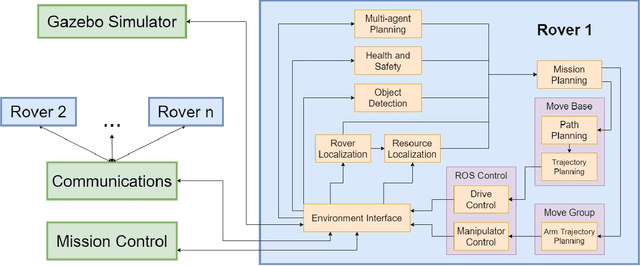
Team Mountaineers launched efforts on the NASA Space Robotics Challenge Phase-2 (SRC2). The challenge will be held on the lunar terrain with virtual robotic platforms to establish an in-situ resource utilization process. In this report, we provide an overview of a simulation environment, a virtual mobile robot, and a software architecture that was created by Team Mountaineers in order to prepare for the competition's qualification round before the competition environment was released.
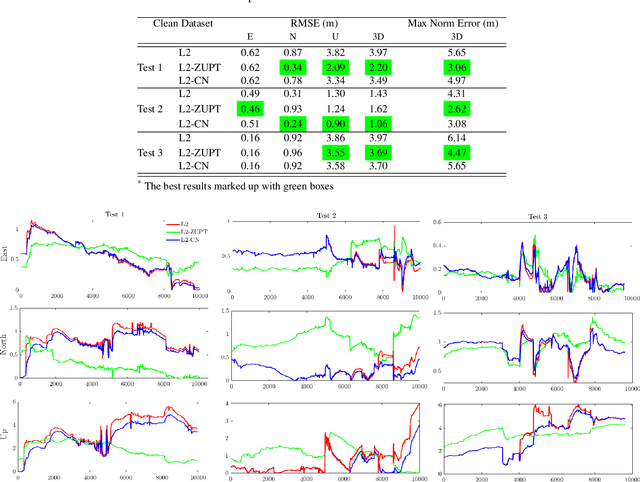
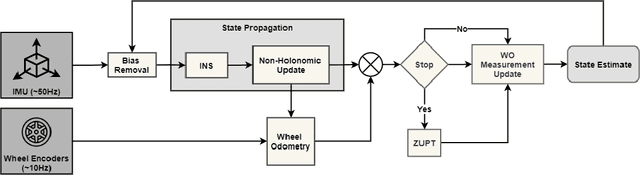
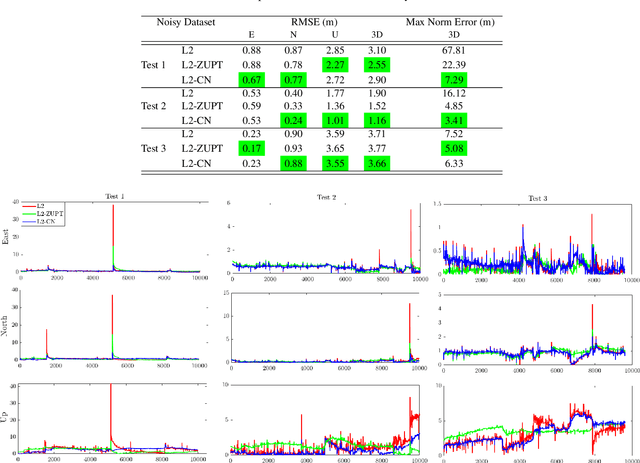
Improved Planetary Rover Inertial Navigation and Wheel Odometry Performance through Periodic Use of Zero-Type Constraints
Jun 20, 2019

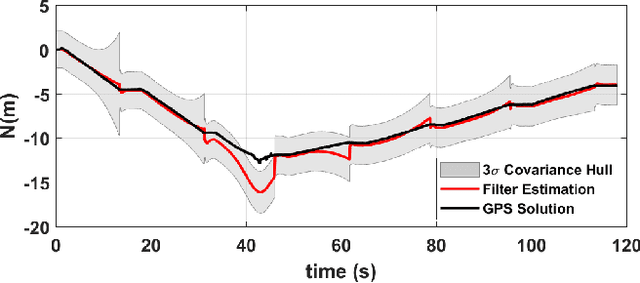
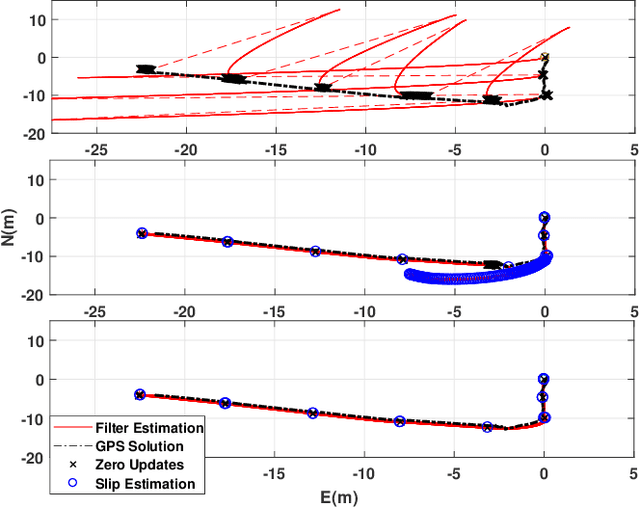
We present an approach to enhance wheeled planetary rover dead-reckoning localization performance by leveraging the use of zero-type constraint equations in the navigation filter. Without external aiding, inertial navigation solutions inherently exhibit cubic error growth. Furthermore, for planetary rovers that are traversing diverse types of terrain, wheel odometry is often unreliable for use in localization, due to wheel slippage. For current Mars rovers, computer vision-based approaches are generally used whenever there is a high possibility of positioning error; however, these strategies require additional computational power, energy resources, and significantly slow down the rover traverse speed. To this end, we propose a navigation approach that compensates for the high likelihood of odometry errors by providing a reliable navigation solution that leverages non-holonomic vehicle constraints as well as state-aware pseudo-measurements (e.g., zero velocity and zero angular rate) updates during periodic stops. By using this, computationally expensive visual-based corrections could be performed less often. Experimental tests that compare against GPS-based localization are used to demonstrate the accuracy of the proposed approach. The source code, post-processing scripts, and example datasets associated with the paper are published in a public repository.