Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeam Mountaineers Space Robotic Challenge Phase-2 Qualification Round Preparation Report
Mar 22, 2020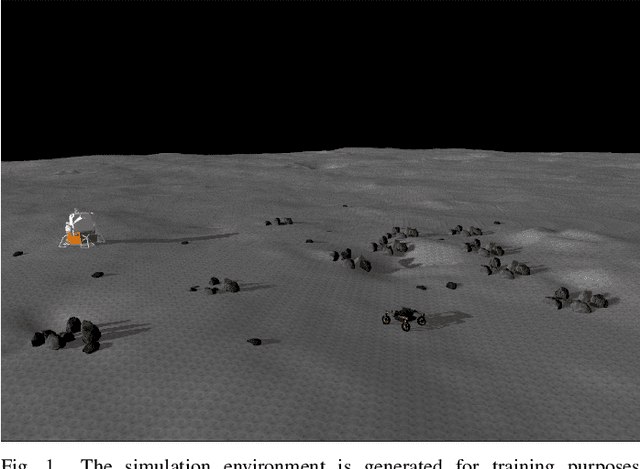
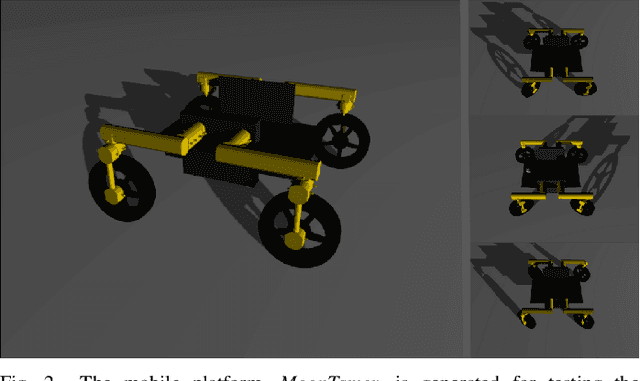
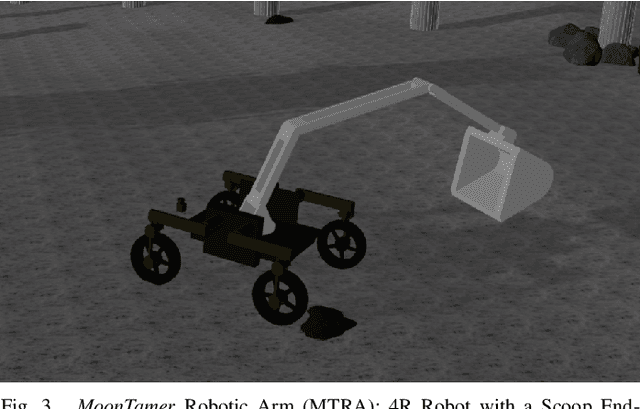
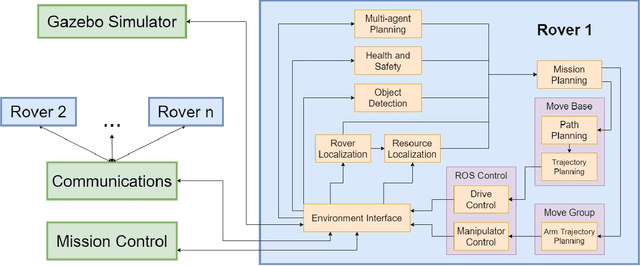
Team Mountaineers launched efforts on the NASA Space Robotics Challenge Phase-2 (SRC2). The challenge will be held on the lunar terrain with virtual robotic platforms to establish an in-situ resource utilization process. In this report, we provide an overview of a simulation environment, a virtual mobile robot, and a software architecture that was created by Team Mountaineers in order to prepare for the competition's qualification round before the competition environment was released.
* 6 pages, 5 figures, technical report
Via