 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistically Informed Robot Object Search with Multiple Regions
Apr 05, 2024



The increasing use of autonomous robot systems in hazardous environments underscores the need for efficient search and rescue operations. Despite significant advancements, existing literature on object search often falls short in overcoming the difficulty of long planning horizons and dealing with sensor limitations, such as noise. This study introduces a novel approach that formulates the search problem as a belief Markov decision processes with options (BMDP-O) to make Monte Carlo tree search (MCTS) a viable tool for overcoming these challenges in large scale environments. The proposed formulation incorporates sequences of actions (options) to move between regions of interest, enabling the algorithm to efficiently scale to large environments. This approach also enables the use of customizable fields of view, for use with multiple types of sensors. Experimental results demonstrate the superiority of this approach in large environments when compared to the problem without options and alternative tools such as receding horizon planners. Given compute time for the proposed formulation is relatively high, a further approximated "lite" formulation is proposed. The lite formulation finds objects in a comparable number of steps with faster computation.
Slip-Based Autonomous ZUPT through Gaussian Process to Improve Planetary Rover Localization
Mar 13, 2021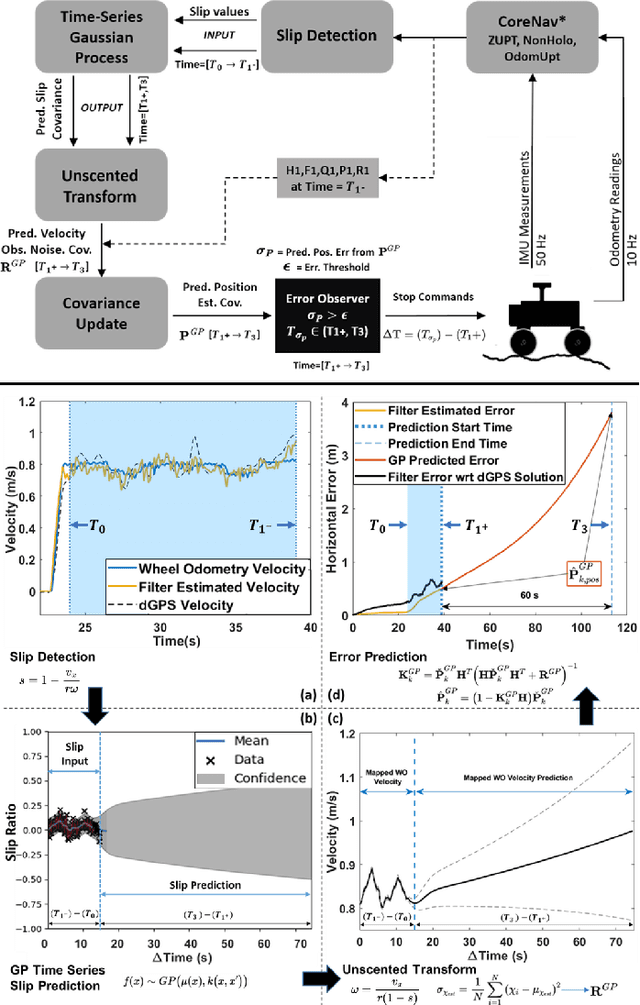
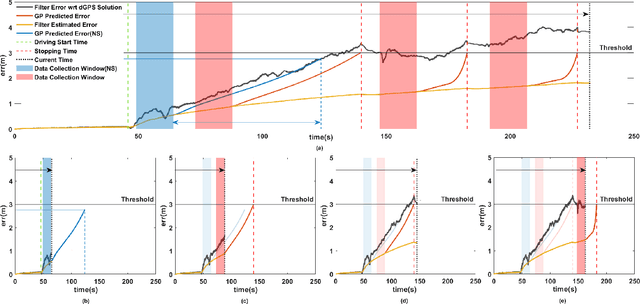
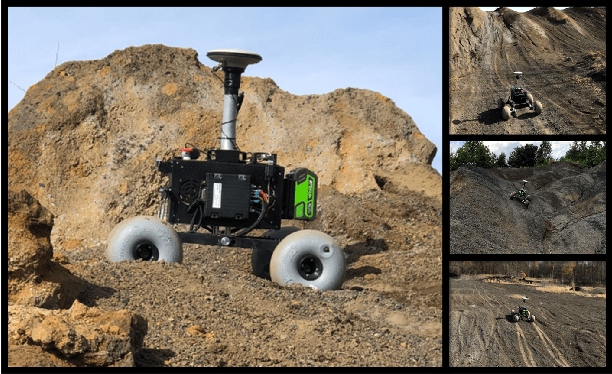
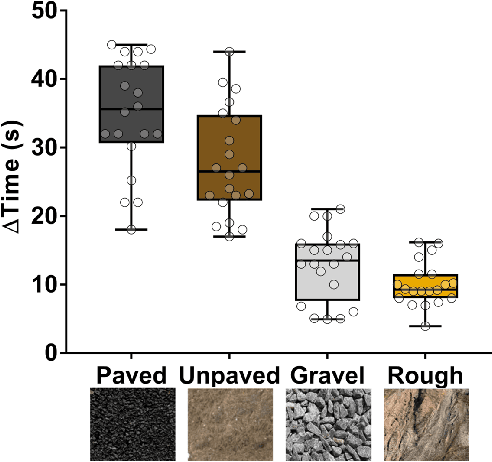
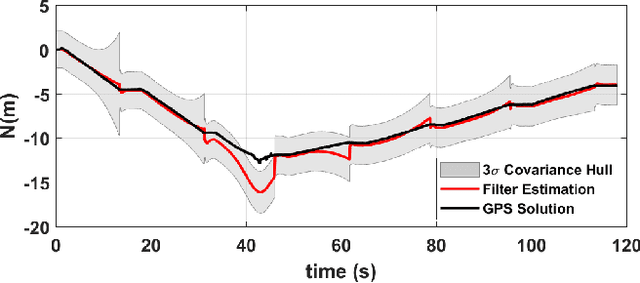
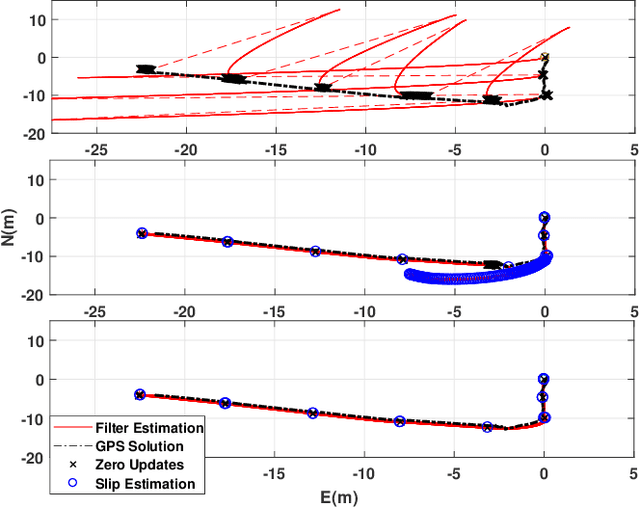
The zero-velocity update (ZUPT) algorithm provides valuable state information to maintain the inertial navigation system (INS) reliability when stationary conditions are satisfied. Employing ZUPT along with leveraging non-holonomic constraints can greatly benefit wheeled mobile robot dead-reckoning localization accuracy. However, determining how often they should be employed requires consideration to balance localization accuracy and traversal rate for planetary rovers. To address this, we investigate when to autonomously initiate stops to improve wheel-inertial odometry (WIO) localization performance with ZUPT. To do this, we propose a 3D dead-reckoning approach that predicts wheel slippage while the rover is in motion and forecasts the appropriate time to stop without changing any rover hardware or major rover operations. We validate with field tests that our approach is viable on different terrain types and achieves a 3D localization accuracy of more than 97% over 650 m drives on rough terrain.
* 8 pages, 6 figures, 2 tables
Flower Interaction Subsystem for a Precision Pollination Robot
Jun 21, 2019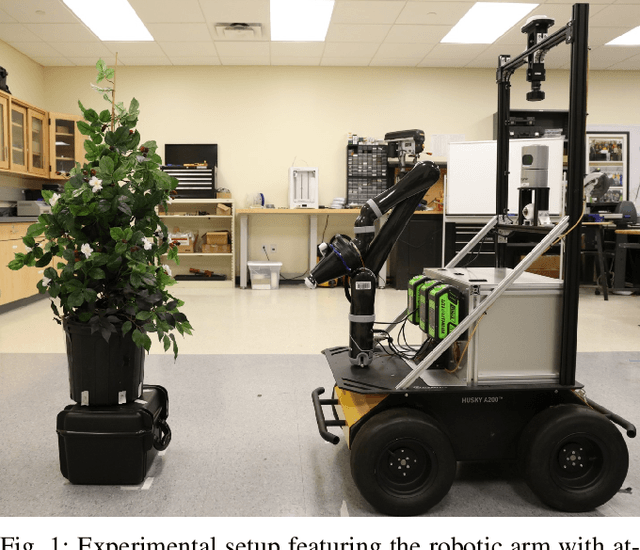
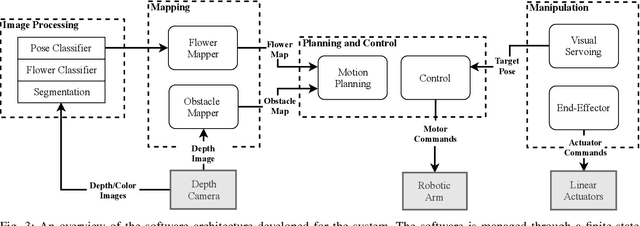
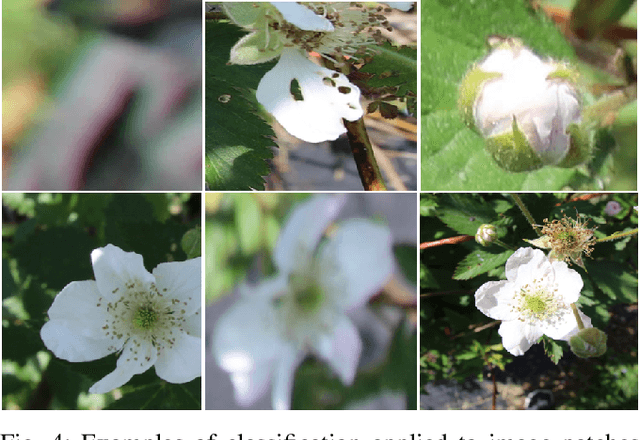
Robotic pollinators not only can aid farmers by providing more cost effective and stable methods for pollinating plants but also benefit crop production in environments not suitable for bees such as greenhouses, growth chambers, and in outer space. Robotic pollination requires a high degree of precision and autonomy but few systems have addressed both of these aspects in practice. In this paper, a fully autonomous robot is presented, capable of precise pollination of individual small flowers. Experimental results show that the proposed system is able to achieve a 93.1% detection accuracy and a 76.9% 'pollination' success rate tested with high-fidelity artificial flowers.
Improved Planetary Rover Inertial Navigation and Wheel Odometry Performance through Periodic Use of Zero-Type Constraints
Jun 20, 2019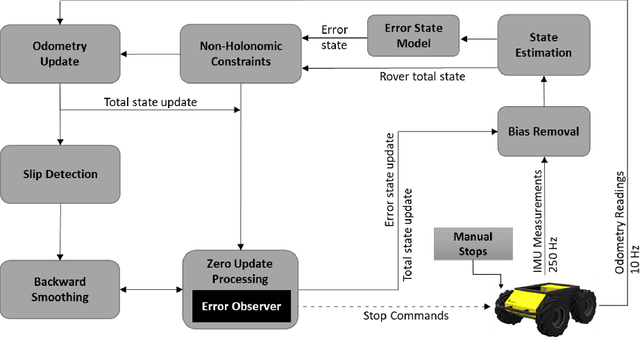

We present an approach to enhance wheeled planetary rover dead-reckoning localization performance by leveraging the use of zero-type constraint equations in the navigation filter. Without external aiding, inertial navigation solutions inherently exhibit cubic error growth. Furthermore, for planetary rovers that are traversing diverse types of terrain, wheel odometry is often unreliable for use in localization, due to wheel slippage. For current Mars rovers, computer vision-based approaches are generally used whenever there is a high possibility of positioning error; however, these strategies require additional computational power, energy resources, and significantly slow down the rover traverse speed. To this end, we propose a navigation approach that compensates for the high likelihood of odometry errors by providing a reliable navigation solution that leverages non-holonomic vehicle constraints as well as state-aware pseudo-measurements (e.g., zero velocity and zero angular rate) updates during periodic stops. By using this, computationally expensive visual-based corrections could be performed less often. Experimental tests that compare against GPS-based localization are used to demonstrate the accuracy of the proposed approach. The source code, post-processing scripts, and example datasets associated with the paper are published in a public repository.
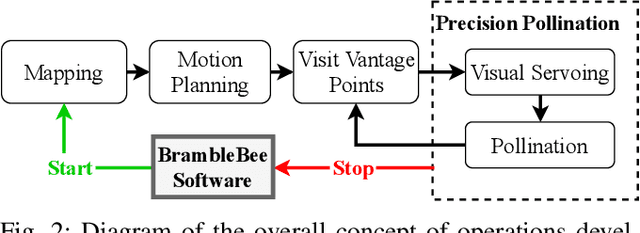
Design of an Autonomous Precision Pollination Robot
Aug 29, 2018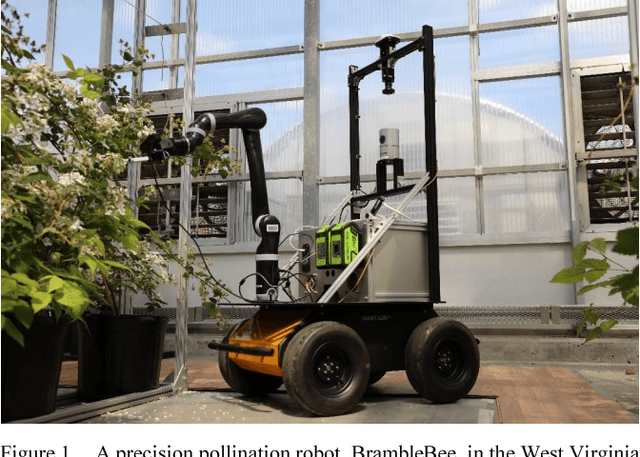

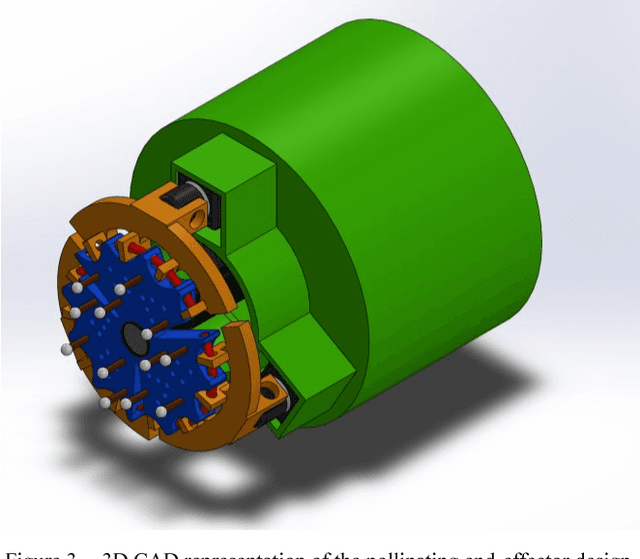
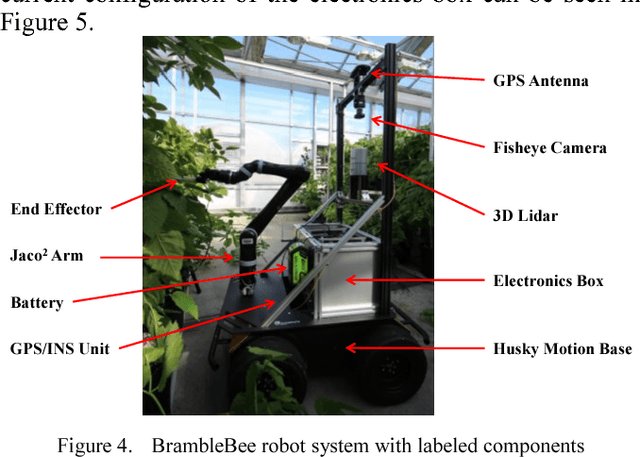
Precision robotic pollination systems can not only fill the gap of declining natural pollinators, but can also surpass them in efficiency and uniformity, helping to feed the fast-growing human population on Earth. This paper presents the design and ongoing development of an autonomous robot named "BrambleBee", which aims at pollinating bramble plants in a greenhouse environment. Partially inspired by the ecology and behavior of bees, BrambleBee employs state-of-the-art localization and mapping, visual perception, path planning, motion control, and manipulation techniques to create an efficient and robust autonomous pollination system.