 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProviding a Philosophical Critique and Guidance of Fairness Metrics
Oct 17, 2021In this project, I seek to present a summarization and unpacking of themes of fairness both in the field of computer science and philosophy. This is motivated by an increased dependence on notions of fairness in computer science and the millennia of thought on the subject in the field of philosophy. It is my hope that this acts as a crash course in $\textit{fairness philosophy}$ for the everyday computer scientist and specifically roboticist. This paper will consider current state-of-the-art ideas in computer science, specifically algorithmic fairness, as well as attempt to lay out a rough set of guidelines for metric fairness. Throughout the discussion of philosophy, we will return to a thought experiment posed by Cynthia Dwork on the question of randomness.
Flower Interaction Subsystem for a Precision Pollination Robot
Jun 21, 2019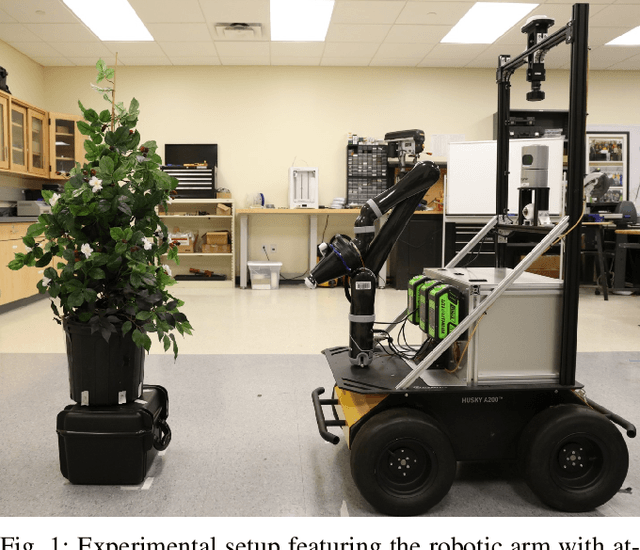
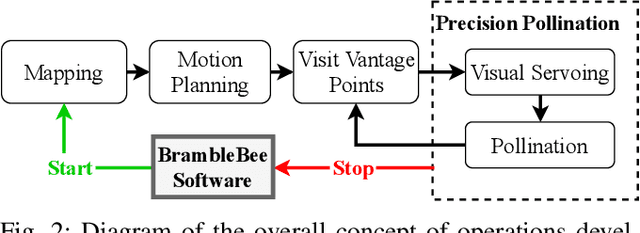
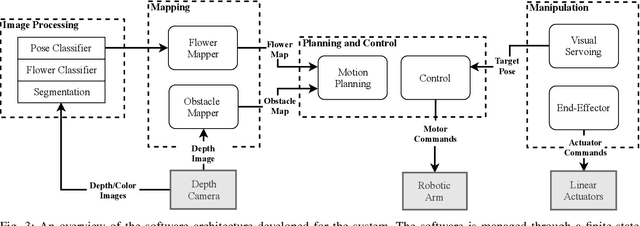
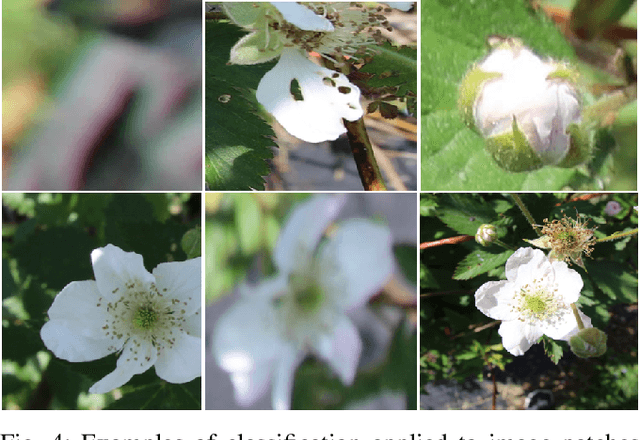
Robotic pollinators not only can aid farmers by providing more cost effective and stable methods for pollinating plants but also benefit crop production in environments not suitable for bees such as greenhouses, growth chambers, and in outer space. Robotic pollination requires a high degree of precision and autonomy but few systems have addressed both of these aspects in practice. In this paper, a fully autonomous robot is presented, capable of precise pollination of individual small flowers. Experimental results show that the proposed system is able to achieve a 93.1% detection accuracy and a 76.9% 'pollination' success rate tested with high-fidelity artificial flowers.