 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsynchronous Distributed Smoothing and Mapping via On-Manifold Consensus ADMM
Oct 18, 2023



In this paper we present a fully distributed, asynchronous, and general purpose optimization algorithm for Consensus Simultaneous Localization and Mapping (CSLAM). Multi-robot teams require that agents have timely and accurate solutions to their state as well as the states of the other robots in the team. To optimize this solution we develop a CSLAM back-end based on Consensus ADMM called MESA (Manifold, Edge-based, Separable ADMM). MESA is fully distributed to tolerate failures of individual robots, asynchronous to tolerate practical network conditions, and general purpose to handle any CSLAM problem formulation. We demonstrate that MESA exhibits superior convergence rates and accuracy compare to existing state-of-the art CSLAM back-end optimizers.
Flower Interaction Subsystem for a Precision Pollination Robot
Jun 21, 2019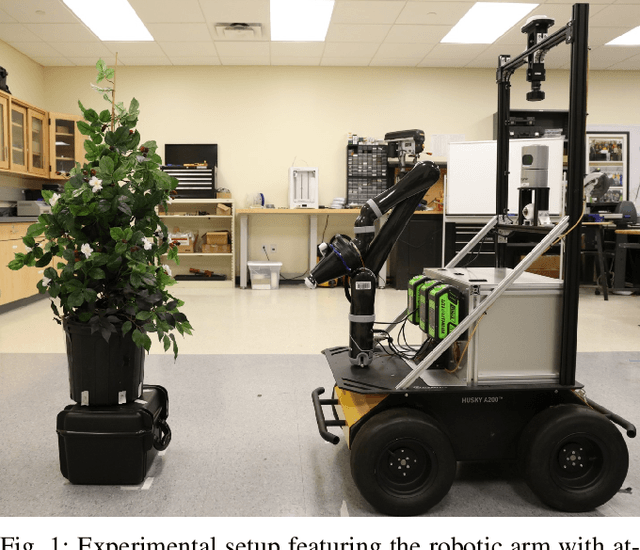
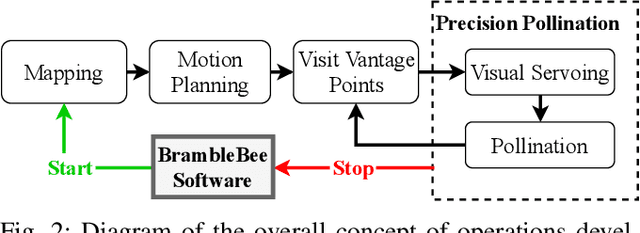
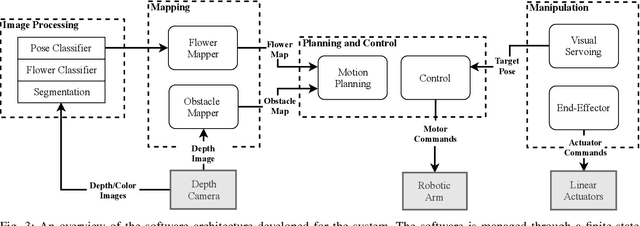
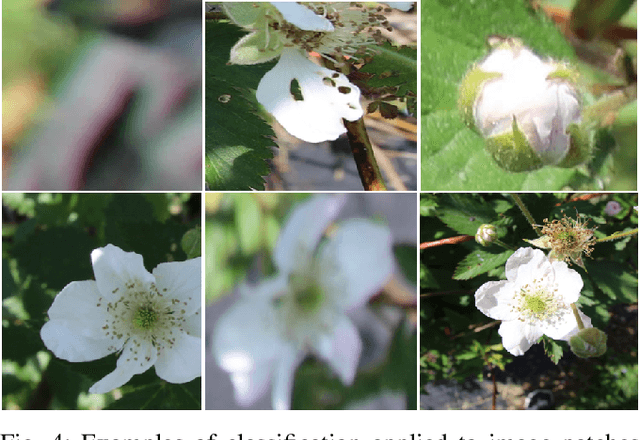
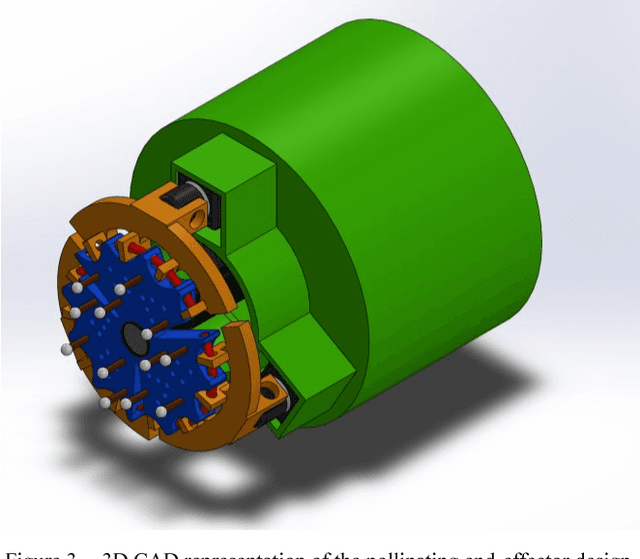
Robotic pollinators not only can aid farmers by providing more cost effective and stable methods for pollinating plants but also benefit crop production in environments not suitable for bees such as greenhouses, growth chambers, and in outer space. Robotic pollination requires a high degree of precision and autonomy but few systems have addressed both of these aspects in practice. In this paper, a fully autonomous robot is presented, capable of precise pollination of individual small flowers. Experimental results show that the proposed system is able to achieve a 93.1% detection accuracy and a 76.9% 'pollination' success rate tested with high-fidelity artificial flowers.
Design of an Autonomous Precision Pollination Robot
Aug 29, 2018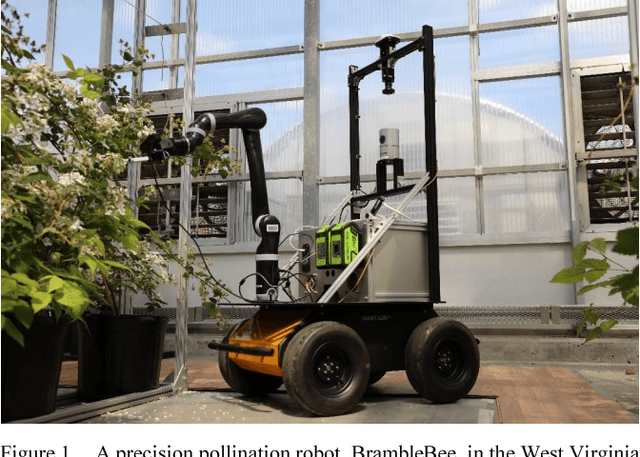

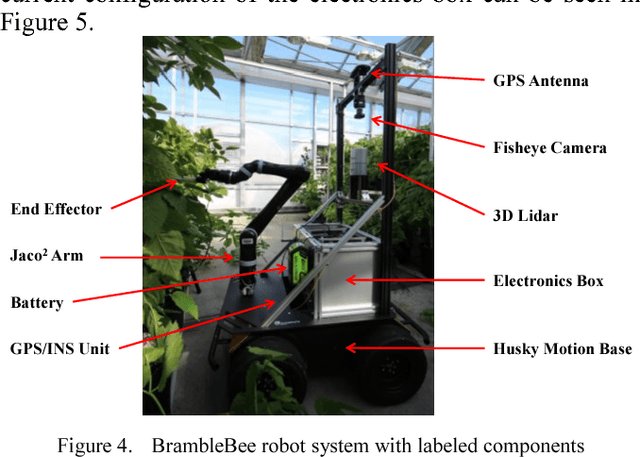
Precision robotic pollination systems can not only fill the gap of declining natural pollinators, but can also surpass them in efficiency and uniformity, helping to feed the fast-growing human population on Earth. This paper presents the design and ongoing development of an autonomous robot named "BrambleBee", which aims at pollinating bramble plants in a greenhouse environment. Partially inspired by the ecology and behavior of bees, BrambleBee employs state-of-the-art localization and mapping, visual perception, path planning, motion control, and manipulation techniques to create an efficient and robust autonomous pollination system.