 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlower Interaction Subsystem for a Precision Pollination Robot
Jun 21, 2019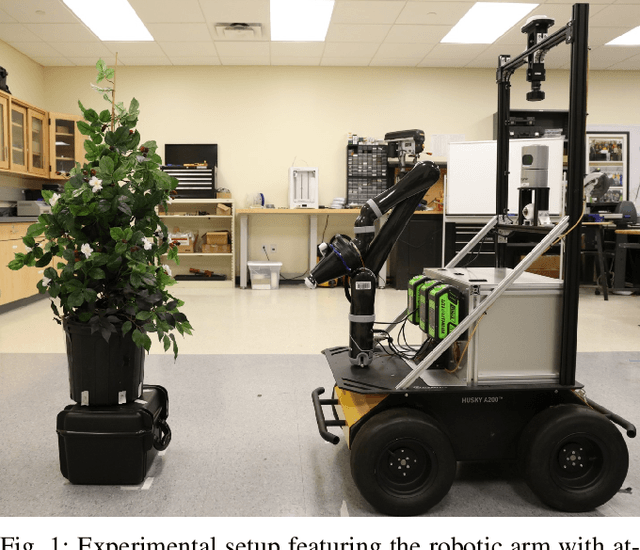
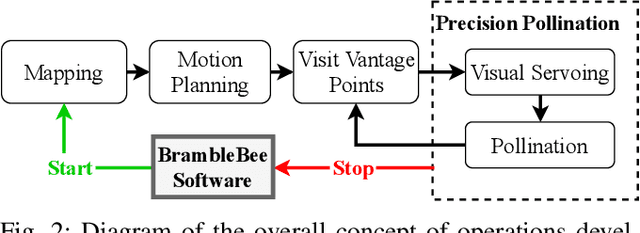
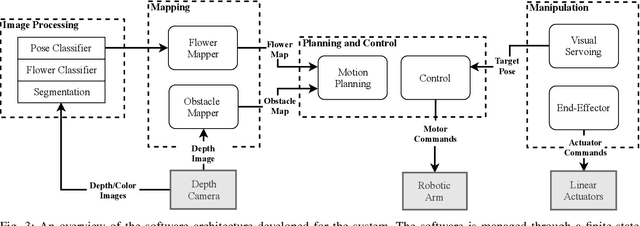
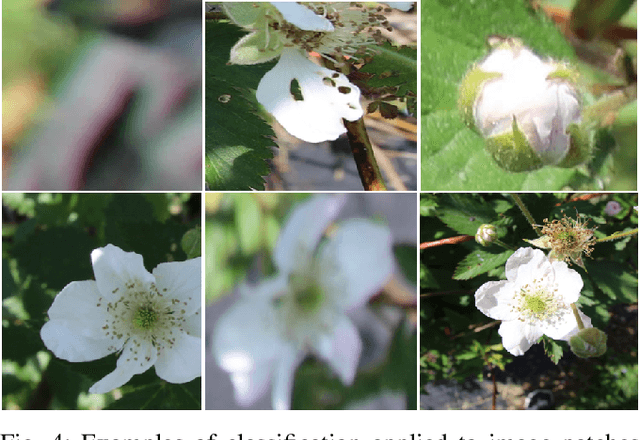
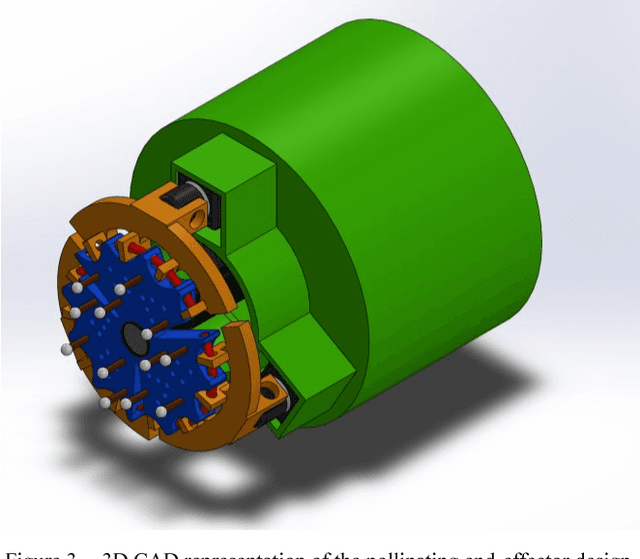
Robotic pollinators not only can aid farmers by providing more cost effective and stable methods for pollinating plants but also benefit crop production in environments not suitable for bees such as greenhouses, growth chambers, and in outer space. Robotic pollination requires a high degree of precision and autonomy but few systems have addressed both of these aspects in practice. In this paper, a fully autonomous robot is presented, capable of precise pollination of individual small flowers. Experimental results show that the proposed system is able to achieve a 93.1% detection accuracy and a 76.9% 'pollination' success rate tested with high-fidelity artificial flowers.
Design of an Autonomous Precision Pollination Robot
Aug 29, 2018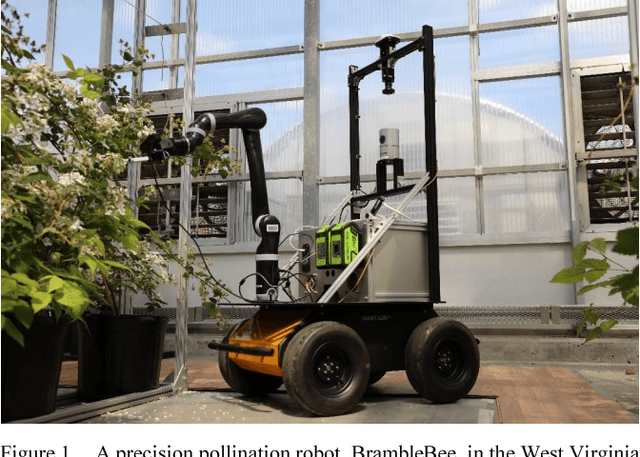

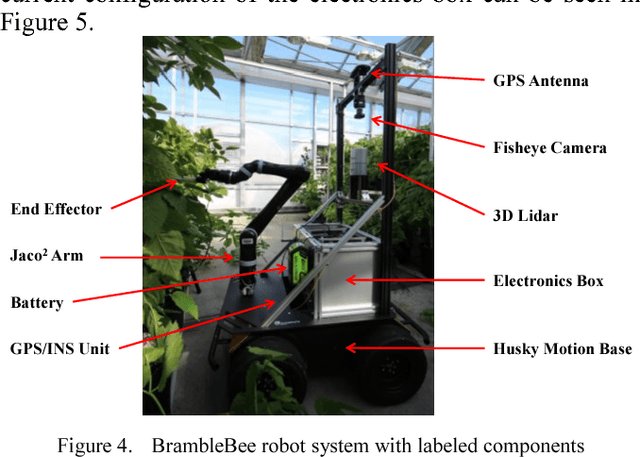
Precision robotic pollination systems can not only fill the gap of declining natural pollinators, but can also surpass them in efficiency and uniformity, helping to feed the fast-growing human population on Earth. This paper presents the design and ongoing development of an autonomous robot named "BrambleBee", which aims at pollinating bramble plants in a greenhouse environment. Partially inspired by the ecology and behavior of bees, BrambleBee employs state-of-the-art localization and mapping, visual perception, path planning, motion control, and manipulation techniques to create an efficient and robust autonomous pollination system.
Perceptually Optimized Generative Adversarial Network for Single Image Dehazing
May 03, 2018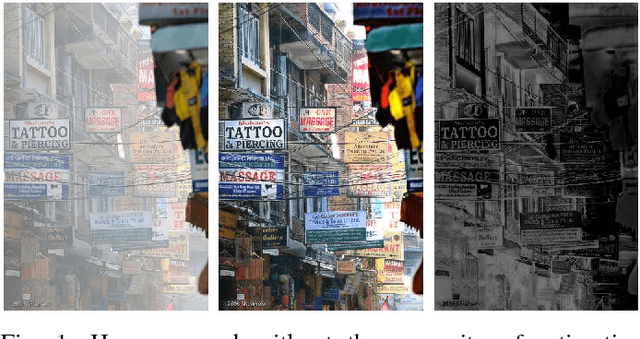
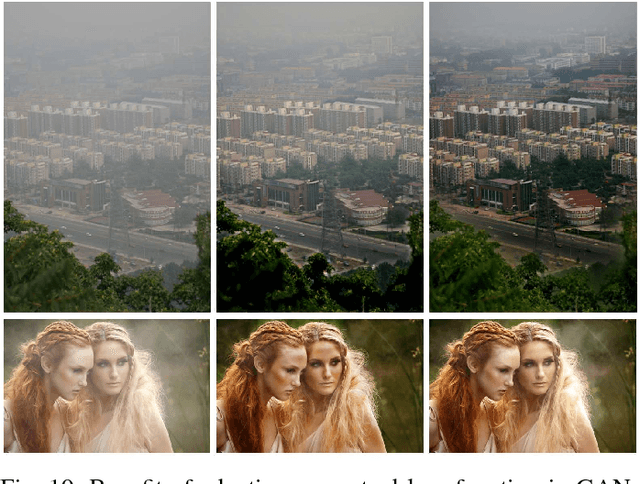


Existing approaches towards single image dehazing including both model-based and learning-based heavily rely on the estimation of so-called transmission maps. Despite its conceptual simplicity, using transmission maps as an intermediate step often makes it more difficult to optimize the perceptual quality of reconstructed images. To overcome this weakness, we propose a direct deep learning approach toward image dehazing bypassing the step of transmission map estimation and facilitating end-to-end perceptual optimization. Our technical contributions are mainly three-fold. First, based on the analogy between dehazing and denoising, we propose to directly learn a nonlinear mapping from the space of degraded images to that of haze-free ones via recursive deep residual learning; Second, inspired by the success of generative adversarial networks (GAN), we propose to optimize the perceptual quality of dehazed images by introducing a discriminator and a loss function adaptive to hazy conditions; Third, we propose to remove notorious halo-like artifacts at large scene depth discontinuities by a novel application of guided filtering. Extensive experimental results have shown that the subjective qualities of dehazed images by the proposed perceptually optimized GAN (POGAN) are often more favorable than those by existing state-of-the-art approaches especially when hazy condition varies.