 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Stickbug: a Six-Armed Precision Pollination Robot
Apr 04, 2024



This work presents the design of Stickbug, a six-armed, multi-agent, precision pollination robot that combines the accuracy of single-agent systems with swarm parallelization in greenhouses. Precision pollination robots have often been proposed to offset the effects of a decreasing population of natural pollinators, but they frequently lack the required parallelization and scalability. Stickbug achieves this by allowing each arm and drive base to act as an individual agent, significantly reducing planning complexity. Stickbug uses a compact holonomic Kiwi drive to navigate narrow greenhouse rows, a tall mast to support multiple manipulators and reach plant heights, a detection model and classifier to identify Bramble flowers, and a felt-tipped end-effector for contact-based pollination. Initial experimental validation demonstrates that Stickbug can attempt over 1.5 pollinations per minute with a 50% success rate. Additionally, a Bramble flower perception dataset was created and is publicly available alongside Stickbug's software and design files.
Swarm of One: Bottom-up Emergence of Stable Robot Bodies from Identical Cells
Jun 22, 2023



Unlike most human-engineered systems, biological systems are emergent from low-level interactions, allowing much broader diversity and superior adaptation to the complex environments. Inspired by the process of morphogenesis in nature, a bottom-up design approach for robot morphology is proposed to treat a robot's body as an emergent response to underlying processes rather than a predefined shape. This paper presents Loopy, a "Swarm-of-One" polymorphic robot testbed that can be viewed simultaneously as a robotic swarm and a single robot. Loopy's shape is determined jointly by self-organization and morphological computing using physically linked homogeneous cells. Experimental results show that Loopy can form symmetric shapes consisting of lobes. Using the the same set of parameters, even small amounts of initial noise can change the number of lobes formed. However, once in a stable configuration, Loopy has an "inertia" to transfiguring in response to dynamic parameters. By making the connections among self-organization, morphological computing, and robot design, this paper lays the foundation for more adaptable robot designs in the future.
Feeling Optimistic? Ambiguity Attitudes for Online Decision Making
Mar 07, 2023



As autonomous agents enter complex environments, it becomes more difficult to adequately model the interactions between the two. Agents must therefore cope with greater ambiguity (e.g., unknown environments, underdefined models, and vague problem definitions). Despite the consequences of ignoring ambiguity, tools for decision making under ambiguity are understudied. The general approach has been to avoid ambiguity (exploit known information) using robust methods. This work contributes ambiguity attitude graph search (AAGS), generalizing robust methods with ambiguity attitudes--the ability to trade-off between seeking and avoiding ambiguity in the problem. AAGS solves online decision making problems with limited budget to learn about their environment. To evaluate this approach AAGS is tasked with path planning in static and dynamic environments. Results demonstrate that appropriate ambiguity attitudes are dependent on the quality of information from the environment. In relatively certain environments, AAGS can readily exploit information with robust policies. Conversely, model complexity reduces the information conveyed by individual samples; this allows the risks taken by optimistic policies to achieve better performance.
A Framework for Controlling Multi-Robot Systems Using Bayesian Optimization and Linear Combination of Vectors
Mar 23, 2022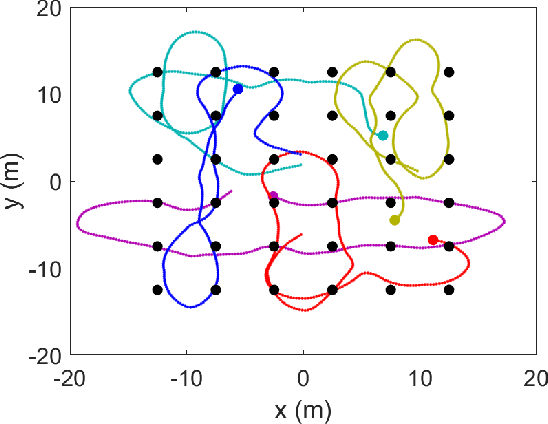
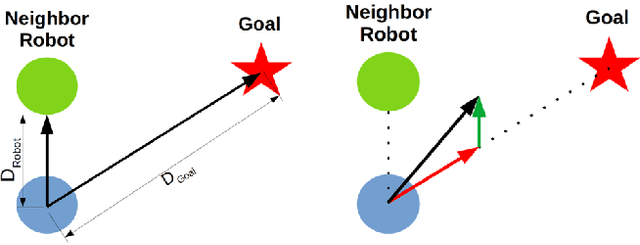
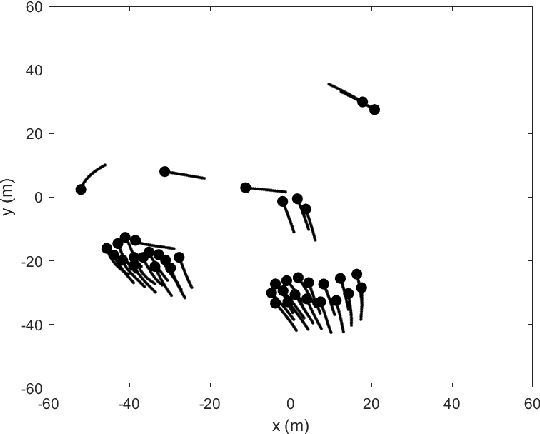
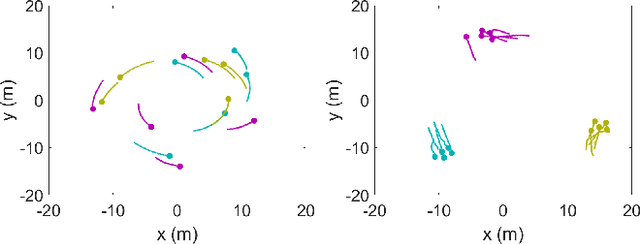
We propose a general framework for creating parameterized control schemes for decentralized multi-robot systems. A variety of tasks can be seen in the decentralized multi-robot literature, each with many possible control schemes. For several of them, the agents choose control velocities using algorithms that extract information from the environment and combine that information in meaningful ways. From this basic formation, a framework is proposed that classifies each robots' measurement information as sets of relevant scalars and vectors and creates a linear combination of the measured vector sets. Along with an optimizable parameter set, the scalar measurements are used to generate the coefficients for the linear combination. With this framework and Bayesian optimization, we can create effective control systems for several multi-robot tasks, including cohesion and segregation, pattern formation, and searching/foraging.